(k) УСТРОЙСТВО для КОНТРОЛЯ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ МЕХАНИЧЕСКИХ 

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровое устройство для измерения кинематической погрешности зубчатых передач | 1981 |
|
SU1017913A1 |
| Кинематомер | 1982 |
|
SU1097894A1 |
| Способ контроля кинематической погрешности передач | 1981 |
|
SU977941A1 |
| Устройство для контроля кинематической погрешности передач | 1982 |
|
SU1021936A1 |
| ПРИБОР ДЛЯ КОНТРОЛЯ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ ЗУБЧАТЫХ ПЕРЕДАЧ | 1972 |
|
SU436225A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1981 |
|
SU962761A1 |
| Устройство управления и контроля работы невзрывных импульсных источников сейсмических сигналов | 1986 |
|
SU1408402A1 |
| Устройство для автоматического контроля геометрических размеров объекта при деформации | 1983 |
|
SU1219915A1 |
| Устройство для анализа кинематической погрешности зубчатых передач | 1984 |
|
SU1227945A1 |
| Устройство для контроля кинематичес-КОй пОгРЕшНОСТи пЕРЕдАч | 1979 |
|
SU796649A1 |
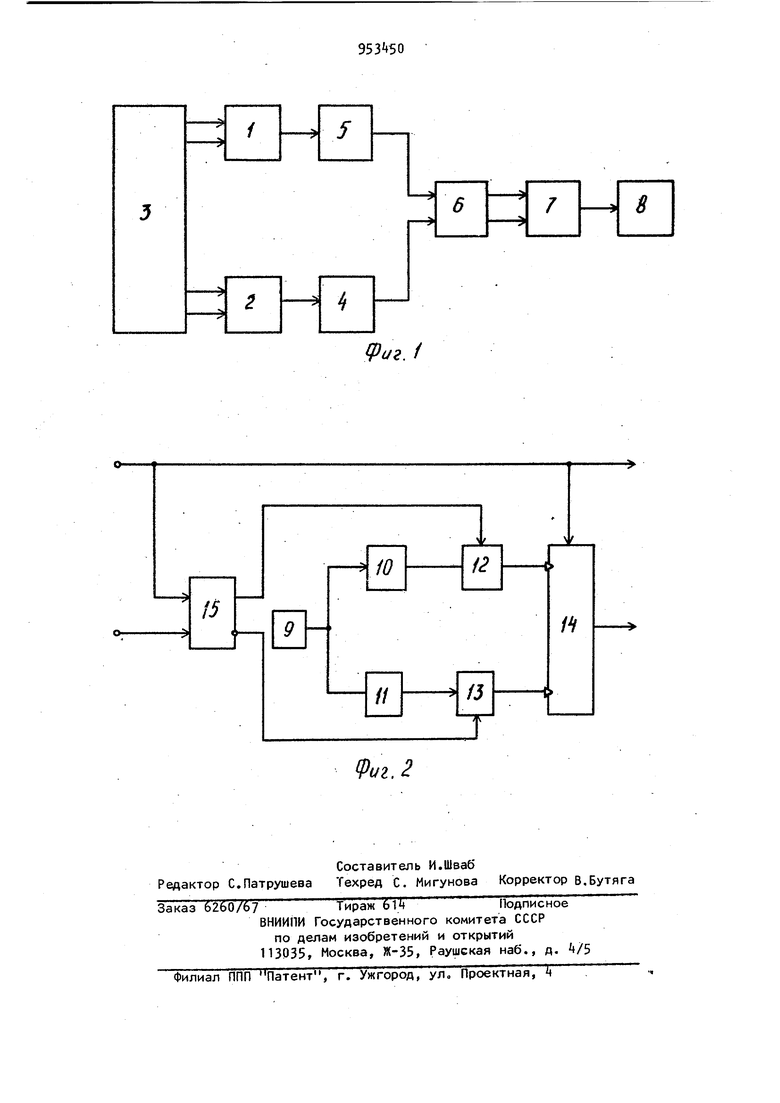
Изобретение относится к техническим измерениям в машиностроении, а именно к устройствам для контроля кинематической погрешности механизмое. Известно устройство для контроля кинематической погрешности передач, содержащее импульсные преобразователи угловых перемещений начального и конечного звеньев контролируемой передачи, выходы которых через делители частоты подключены к входам фаз метра, соединенного с регистрирующим прибором и блок управления коэффициентом деления, синхронизируемый импульсами преобразователя начального звена 1. Наиболее близким по технической сущности к изобретению является устройство для контроля кинематической погрешности передач, содержащее датчики углов поворота начального и конечного звеньев контролируемой передачи, соединенные с их выходами дели т ели частоты, и последовательно подключенные к ним блок постоянства масштаба, фазометр и регистратор. При этом блоки постоянства масштаба выполнены в виде электронных делителей частоты Г2. Недостатком известных устройств является ограниченность диапазона контроля передаточных отношений контролируемых передач, вызванная электронными делителями частоты. . Цель изобретения - расширение функциональных возможностей устройства. Указанная цель достигается тем, что в устройстве для контроля кинематической погрешности механических передач, содержащем датчики углов поворота начального и конечного звеньев контролируемой передачи, соединенные с их выходами делитепи частоты и последовательно подключенные к ним блок постоянства масштаба, фазометр и регистратор, блок постоянства, масштаба выполнен в виде генерато395pa- частоты, дополнительных делителей частоты, ключей, реверсивного счетчика и управляющего триггера, выход генератора соединен с дополнительными делителями частоты, которые через ключи подключены к суммирующим и вычитающим входам реверсивного счетчика, а входы управления ключей связаны с прямым и инвертирующим выходами управляющего триггера, На фиго 1 изображена, блок-схема устройства для контроля кинематической погрешности механических передач на фиг. 2 - блок-схема масштабного блока. Блок-схема устройства включает датчики 1 и 2 углов поворота начального и конечного звеньев контролируемой механической передачи 3. Выходы датчиков 1-2 через делители k-S частоты подключены на вход блока 6 постоянства масштаба, который соединен с фазометром 7. К выходу фазомет ра 7 подключен регистратор 8. Блок 6 постоянства масштаба (фиг 2) выполнен в виде генератора 9 частоты, дополнительных делителей 10 и 11 частоты, ключей 12 и 13, реверсивного счетчика 14.и управляющего триггера 15« Выход генератора 9 соедиАен с де лителями 10 и 11 частоты, которые через ключи 12 и 13 подключены к суммируюи им и вычитающим входам реверсивного счетчика 1 Входы управления ключей 12 и 13 связаны с прямыми инвертирующим выходами управляю щего триггера 15. Устройство работает следующим образом. При вращении передачи 3 сигналы с датчиков 1 и 2, характеризующие угловые положения начального и конеч ного звеньев, с помощью делителей i и 5 приводятся к одинаковой частоте (частота согласования). Выходные сигналы делителя k поступают на управляющий триггер 15, который открывает ключ 12 и закрывает ключ 13. На суммирующий вход реверсивного . счетчика 14 начинают поступать импульсы с периодом следования где tj. - период следования импульсов генератора; М - масштабный коэффициент. Через время tф, определяемое импульсом с делителя 5, равное временному рассогласованию сигналов датчиков 1-2, ключ 12 закрывается, а ключ 13 открывается, и на вычитающий вход счетчика 14 поступают импульсы с периодом tp(K-M), где К коэффициент деления делителя 4.- В счетчике 14 за время 1ф записано число импульсовМ -т -Время t , за ко. 1 торое считано это количество импуль.. , К-М сов N, равно 1,2 1ф----- Таким образом, временной интервал между импульсами на выходе блока 6 равен К С блока 6 постоянства масштаба на фазометр 7 поступают сигналы, временное рассогласование которых равно увеличенному интервалу t, а частота равна частоте согласования. Измеренная фазометром 7 разность фаз регистрируется регистратором 8. Устройство благодаря такому выполнению блока постоянства масштаба позволяет контролировать передачи с любым передаточным отношением при помощи фазового метода. Формула изобретения Устройство для контроля кинематической погрешности механических передач, содержащее датчики углов поворота начального и конечного звеньев контролируемой передачи, соединенные с их выходами делителя частоты и последовательно подключенные к ним блок постоянства масштаба фазометр и регистратор, отличающееся тем, что, с целью расширения функциональных возможностей, блок постоянства масштаба выполнен в виде генератора частоты, дополнительных делителей частоты, ключей, реверсивного счетчика и управляюи1его триггера, выход генератора соединен с дополнительными делителями частоты, которые через ключи подключены к суммирующим и вычитающим входам реверсивного счетчика, а входы управления ключей связаны с прямыми иинвертирующими выходами управляющего триггера. Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СССР № 439692, кл. G 01 В 7/28, 1972. 2.Авторское свидетельство СССР № 652434, кл. G 01 В 7/28, 1976 (прототип).
иг. 1
15
/
4)tJi.2
