Изобретение относится к автоматиескому регулированию и может быть спользовано в качестве корректируюего устройства для автоматических систем различного назначения.
На фиг.1 приведена функциональная схема нелинейного корректирующего устройства; на фиг.2 - блок индикации скользящего режима, .
Нелинейное корректирующее устройство содержит сумматор 1, релейный элемент 2, инерционный блок 3, состоящий из инерционного звена 4 и сумматора 5, блок 6 индикации скользяще- го режима, ключ 7, фильтр 8 низких частот и генератор 9.
Блок 6 содержит две идентичные ; ифференцирующие цепи 10, входы которых являются входами блока 6, Выходы дифференцирующих цепей 10 соединены соответственно с входом V (счет импульсов) и входом R (сброс) счетчика 11, охваченного обратной связью с выхода на вход С (останов счетчика в прежнем состоянии).
В зависимости от вида передаточных функций инерционного звена А W,(р) и фильтра 8 низких частот WO(P) нелинейное корректирующее устройство; может иметь различную передаточную функцию.
Пусть W, (р) --- , W,(p) -j-- ,
где р - оператор Лапласа, t - постоянная времени. В этом случае нелинейное корректирующее звено работает следующим образом.
Б сумматоре 1 сравнивается входной сигнал X, сигнал U с генератора 9 и сигнал обратной связи Z с выхода инерционного блока 4. Выходной сигнал S сумматора 1 управляет работой релейного элемента
S X - Z + и, .
Если S, О, то нелинейное корректирующее устройство работает в релейном режиме, если S О, то - в скользящем режиме.
Сигнал Ufl предназначен для линеаризации гистерезиса, имеющегося в реальных релейных элементах.
При работе устройства в релейном режиме иа выходе релейного элемента 2 появляется сигнал U2 постоянного уровня. В блоке 6 индикадаи скользящего режима вьфабатывается единичный сигнал, характеризуюпшй релейный
5
режим работы устройства. Момент перехода в релейный режим работы фиксируется как отсутствие переключений релейного элемента -2 в течение заданного интервала времени t . .
По единичному сигналу с блока 6 замыкается ключ 7 и на вход блока 4 подается дополнительный сигнал, коэффициент передачи блока 4 становится равным (К,+ К), где К, и Kg - коэффициенты передачи по первому и второму входам блока 4.
Сигнал начинает интенсивно изменяться до тех пор, пока не появится скользящий режим. При появлении скользящего режима на выходе релейного элемента 2 появляется импульсный сигнал, а на выходе блока 6 - нулевой сигнал, характеризующий ра
при
замкнутом ключе
7 Y /, ij
X
боту устройства в скользящем режиме. Ключ 7 размыкается и коэффициент передачи блока 4 становится равным К,. Величина коэффициента Kj выбирается из условия получения наибольшей точности передачи нелинейного
корректирующего устройства, а величина коэффициента К2 - из условия получения минимального времени восстановления скользящего режима.
Фильтр 8 низких частот служит для вьщеления из двухполярного (в скользящем режиме) сигнала U постоянной составляющей и при малых значениях J его выходной сигнал Y равен: при
разомкнутом ключе 7 Y.-:t- X,
1
к7-ь к;
рлок 6 индикации скользящего режима работает следующим образом.
Счетчик 11 работает в режиме деления частоты на 2, Если релейный элемент 2 формирует импульсы, то на выходе счетчика 11 сигнал отсутствует, так как число импульсов на входе V совпадает с числом импульсов на входе сброса R, Если на входе R импульсы отсутствуют в течение времени, большем, чем 2Т (Т - период следова,ния синхронизирующих импульсов), то на выходе счетчика 11 появляется сигнал, устанавливающий его (по входу с) в режим останова счета, т.е. на выходе счетчика будет присутствовать сигнал до появления импульса сброса на входе R,
Таким образом, в нелинейном кор- 1 ректирующем устройстве при наличии
..312576054.
априорной информации о спектре помех, мехи, т.е. повьппается точность пре- , уменьшаются искажения полярного сиг- образования входного воздейст- напа после исчезновения сигнала по- вия.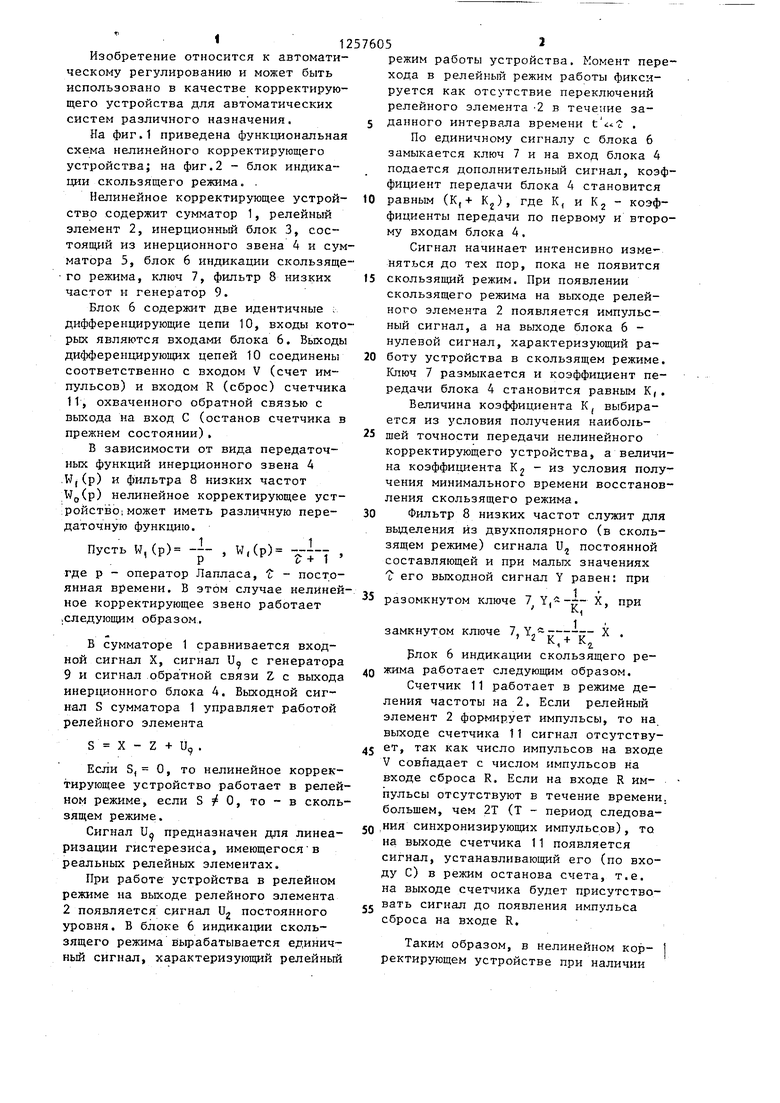
| название | год | авторы | номер документа |
|---|---|---|---|
| Релейно-импульсный регулятор | 1988 |
|
SU1644086A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
| Нелинейный преобразователь для систем с переменной структурой | 1982 |
|
SU1043593A1 |
| Нелинейный фильтр | 1984 |
|
SU1233101A1 |
| Релейный регулятор | 1989 |
|
SU1695263A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| Нелинейное корректирующее устройство | 1985 |
|
SU1251022A1 |
| Устройство компенсации нелинейности | 1982 |
|
SU1037204A1 |
| Устройство для компенсации нелинейности объекта типа "люфт | 1983 |
|
SU1108387A1 |

Редактор А.Лежнина
Составитель С.Исаков
Техред З.Ходанич Корректор Г.Решетник
Заказ 4955/46 Тираж 836Подписное
ВНИИПИ Государственног о комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
.Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
(pus. г
| Нелинейные корректирующие устройства в системах автоматического управления | |||
| /Под ред.Ю.И.Топчеева | |||
| М,: Машиностроение, 1971 | |||
| Измерения, контроль, автоматизация | |||
| Научно-технический реферативный сборник | |||
| М., 1981, № 1(35), с.27 |
