(54) УСТРОЙСТВО ДЛЯ СТАЛКИВАНИЯ ШТУЧНЫХ ГРУЗОВ С КОНВЕЙЕРА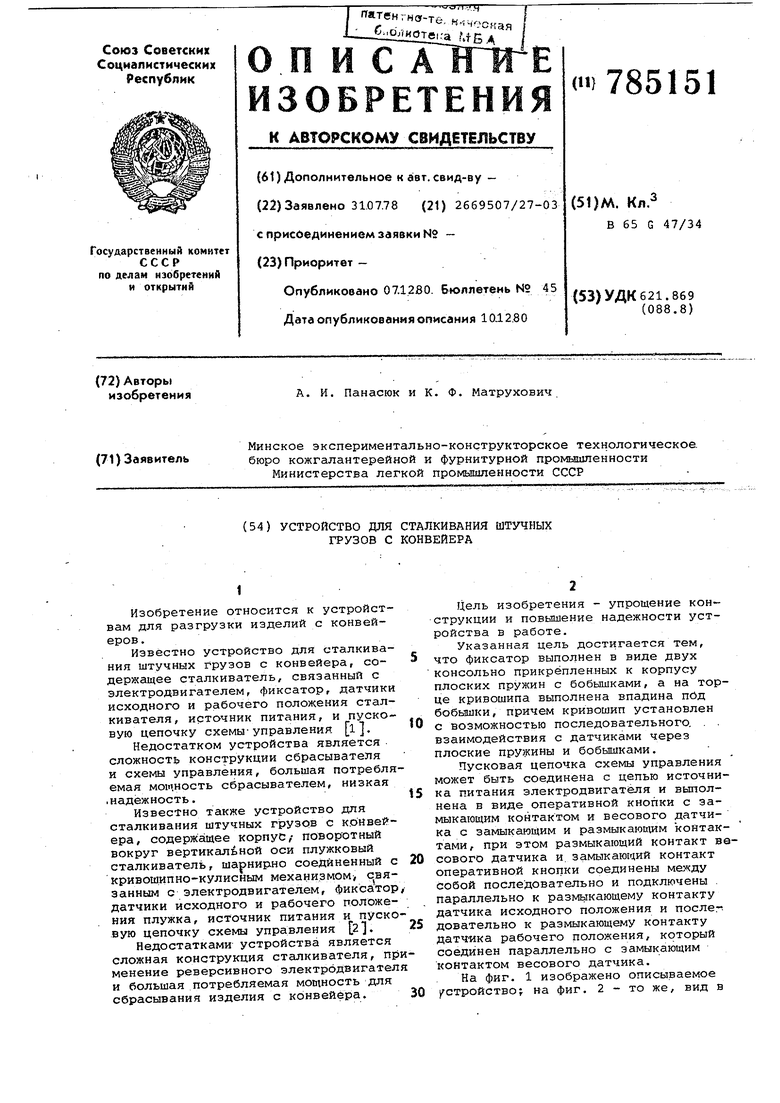
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сталкивания штучных грузов с конвейера | 1980 |
|
SU901193A1 |
| Устройство для управления конвейерной системой | 1984 |
|
SU1240706A1 |
| Плужковый сбрасыватель | 1978 |
|
SU747786A1 |
| Устройство для загрузки и разгрузки люлечного элеватора штучными грузами | 1980 |
|
SU929515A1 |
| Устройство контроля положения стационарных плужковых сбрасывателей | 1979 |
|
SU882874A1 |
| Устройство для загрузки бункеров топливоподач электростанций | 1982 |
|
SU1041448A1 |
| Плужковый сбрасыватель сыпучего материала с ленточного конвейера | 1988 |
|
SU1608104A1 |
| Устройство для управления загрузкой бункеров | 1978 |
|
SU765160A1 |
| УСТРОЙСТВО ДЛЯ СТАЛКИВАНИЯ ШТУЧНЫХ ГРУЗОВ С ЛЕНТЫ КОНВЕЙЕРА | 1972 |
|
SU419451A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЗАГРУЗКОЙ БУНКЕРОВ | 1990 |
|
RU2007360C1 |
Изобретение относится к устройствам для разгрузки изделий с конвейеров . Известно устройство для сталкивания штучных грузов с конвейера, содержащее сталкиватель, связанный с электродвигателем, фиксатор, датчики исходного и рабочего положения сталкивателя, источник питания, и пусковую цепочку схемы-управления 1. Недостатком устройства является сложность конструкции сбрасывателя и схемы управления, большая потребля емая мощность сбрасывателем, низкая .надежность. Известно также устройство для сталкивания штучных г) с к.омвей ера, содержащее корпус,- поворотный вокруг вертикальной оси плужковый сталкиватель, шарнирно соединенный с кривошипно-кулисным механизмом, занным с электродвигателем, фиксатор датчики исходного и рабочего положе НИН плужка, источник питания и пуск вую цепочку схемы управления 2. Недостатками устройства является сложная конструкция сталкивателя, п менение реверсивного электродвигате и большая потребляемая мощность для сбрасывания изделия с конвейера. Цель изобретения - упрощение конструкции и повышение надежности устройства в работе. Указанная цель достигается тем, что фиксатор выполнен в виде двух консольно прикрепленных к корпусу плоских пружин с бобышками, а на торце кривошипа выполнена впадина под бобышки, причем кривошип установлен с возможностью последовательного. . . взаимодействия с датчиками через плоские пружины и бобышками. Пусковая цепочка схемы управления может быть соединена с цепью источника питания электродвигателя и выполнена в виде оперативной кнопки с замыкающим контактом и весового датчика с замыкающим и размыкающим контактами, при этом размыкающий контакт весового датчика и. замыкающий контакт оперативной кнопки соединены между собой последовательно и подключены параллельно к размыкающему контакту датчика исходного положения и послегдовательно к размыкающему контакту датчика рабочего положения, который соединен параллельно с замыкающим контактом весового датчика. На фиг. 1 изображено описываемое устройство; на фиг. 2 - то же, вид в
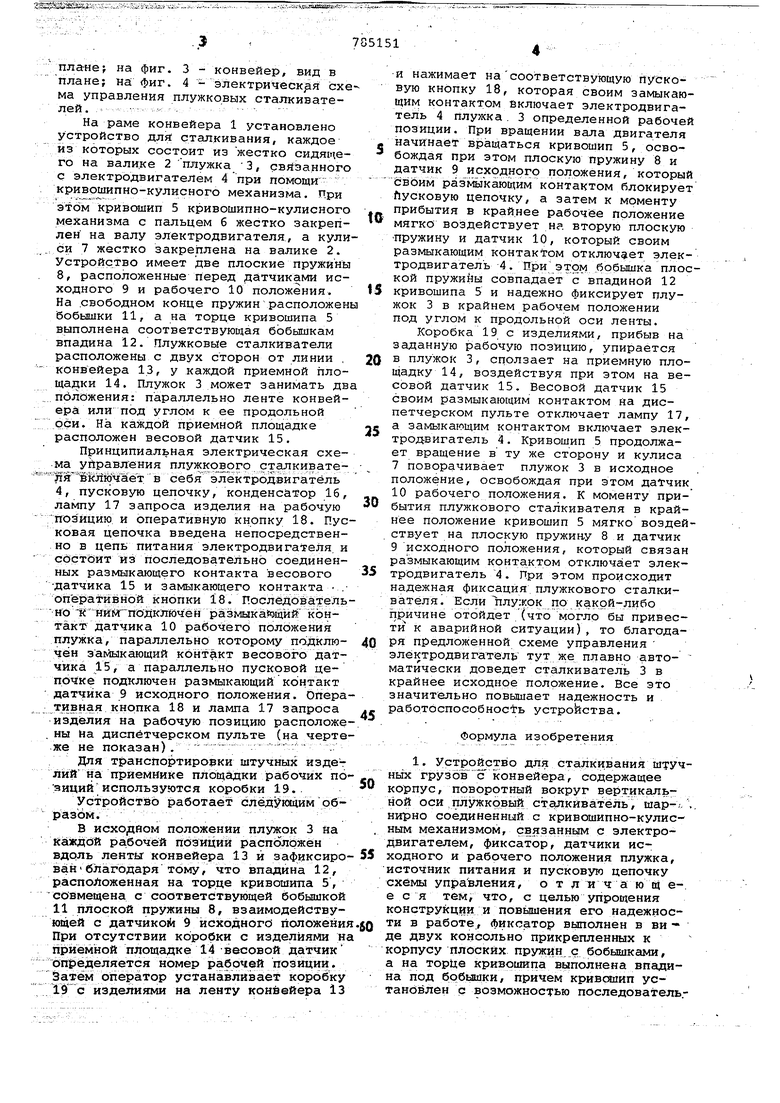
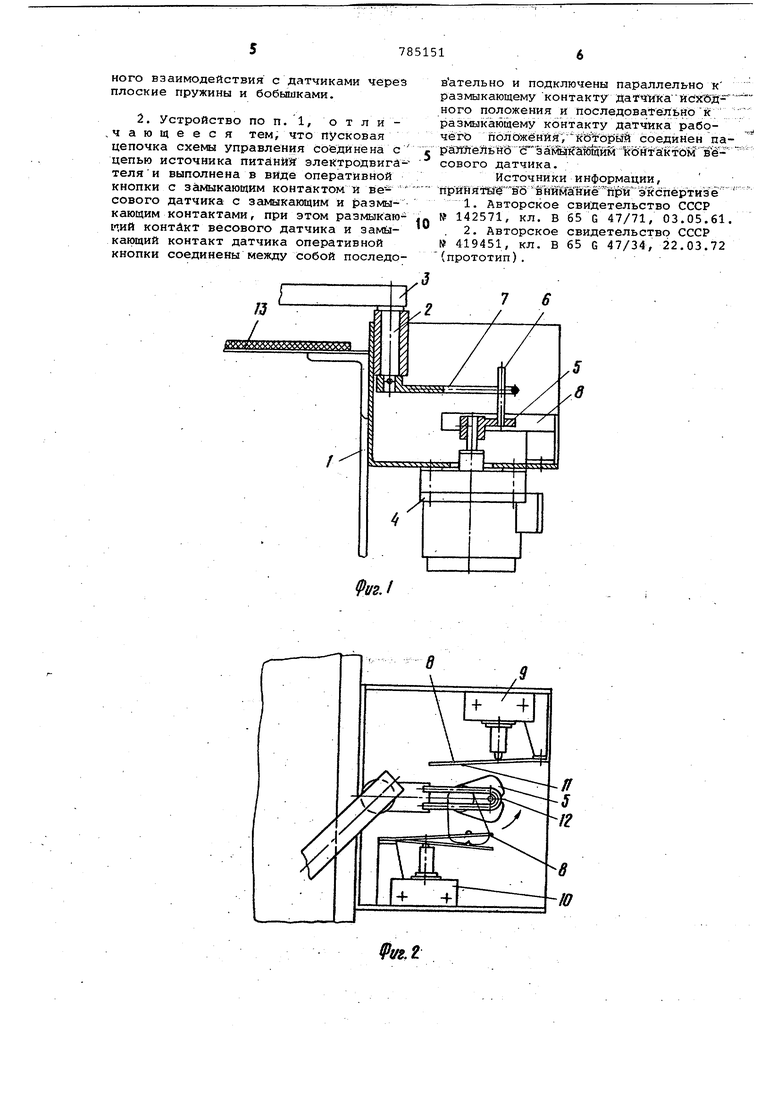
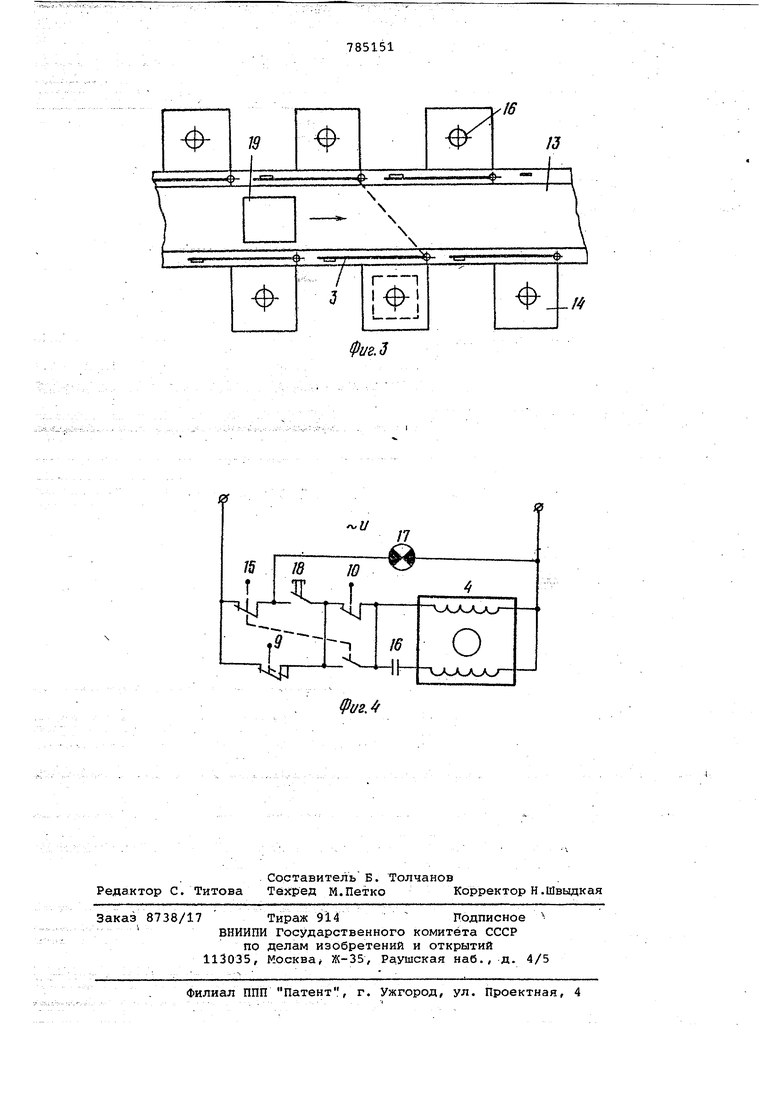
пла-Hej на фиг. 3 - конвейер, вид в плане; на фиг. 4 - электрическая схема управления плужковых сталкивателей. . - - -
На раме конвейера 1 установлено устройство для: сталкивания, каждое из которых сострит из жестко сидящего на валике 2 плужка 3, связанного с электродвигателем 4 при помощи ривошипно-кулисного механизма. При этом кривошип 5 кривошипно-кулисного механизма с пальцем б жестко закрепен на валу электродвигателя, а кулиси 7 жестко закреплена на валике 2. стройство имеет две плоские пружины 8, расположенные перед датчиками исходного 9 и рабочего 10 положения. На свободном конце пружинрасположены бобышки 11, а на торце кривошипа 5 выполнена соответствующая бобышкам впадина 12. ПлужковЫе сталкиватели расположены с двух сторон от линии , конвейера 13, у каждой приемной площадки 14. Плужок 3 может занимать два положения: параллельно ленте конвейера или под углом к ее продольной оси. На каждой приемной площадке расположен весовой датчик 15.
Принципиальная электрическая схема уйравления плужковрго сталкивателя ТвкйШчаёт в себя электродвигатель 4, пусковую целочку, конденсатор 16, лампу 17 запроса изделия на рабочую позйцию и оперативную кнопку 18. Пусковая цепочка введена непосредственно в цепь питания электродвигателя и состоит ИЗ последовательно соединенных размыкающего контакта весового датчика 15 и замыкающего контакта . оперативной кнопки 18. ПоследОЕгательно 1К нйМ ПОДКЛючён размыка 1ЭШ1Йй контакт датчика 10 рабочего положения плужка, параллельно которому по дключён замыкающий контакт весового датчика 15, а параллельно пусковой цеnofKe подключен размыкающий контакт датчика 9 исходного положения. Оперативная кнопка 18 и лампа 17 запроса изделия на рабочую позицию расположены на диспетчерском пульте (на чертеже не показан).
Для транспортировки штучных издег Лий на приемнике площадки рабочих позиций используются кор1Обки 19.
Устройство работает рбразЬм.- , . .
В положении плужок 3 на Каждсзй ра.бочёй позиций распблржён вдоль ленты конвейера 13 и зафиксирован благодаря тому, что впадина 12, расположенная на торце кривошипа 5, совмещена с соответствующей бобышкой 11 плоской пружины 8, взаимодействующей с датчико111 9 исходного положения При отсутствии кЬробки с изделиями на приемной площадке 14 -весовой датчик Определяется номер рабочей позиции. Затем оператор устанавливает коробку изделиями на ленту конвейера 13
7G5151
и нажимает насоответствующую пусковую кнопку 18, которая своим замыкающим контактом включает электродвигатель 4 Плужка . 3 определенной рабочей позиции. При вращении вала двигателя начинает вращаться кривошип 5, освобождая при этом плоскую пружину 8 и датчик 9 исхрднргр положения, который своим размыкающим контактом блокирует пусковую цепочку, а затем к моменту прибытия в крайнее рабочее положение мягко воздействует на вторую плоскую пружину и датчик 10, который своим размыкающим контактом отключает электродвигатель 4. Приэтрм бобышка плоской пружийы совпадает с впадиной 12 кривошипа 5 и надежно фиксирует плужок 3 в крайнем рабочем положении под углом к продольной оси ленты.
Коробка 19 с изделиями, прибыв на заданную рабочую позгщию, упирается в плужок 3, сползает на приемную площадку 14, воздействуя при этом на весовой датчик 15. Весовой датчик 15 своим размыкающим контактом на диспетчерском пульте отключает лампу 17, а замыкающим контактом включает электродвигатель 4. Кривошип 5 продолжает вращение в ту же сторону и кулиса 7 поворачивает плужок 3 в исходное положение, освобождая при этом датчик 10 рабочего положения. К моменту прибытия плужкового сталкивателя в крайнее положение кривошип 5 мягко воздействует на плоскую пружину 8 и датчик 9 исходного положения, который связан размыкающим контактом отключает электродвигатель 4. При этом происходит надежная фиксация плужкового сталкивателя. Если Ълужрк по какой-либо причине отойдет (что могло бы привести к аварийной ситуации), то благодаря предложенной схеме управления электродвигатель тут же плавно автоматически доведет сталкиватель 3 в крайнее исходное положение. Все это значительно повышает надежность и работоспособность устройства.
Формула изобретения
Источники информации, прШ1я№ё §б ШШШё °ШШ кспёрти ё
№ 142571, кл. В 65 G 47/71, 03.05.61.
0
№ 419451, кл. В 65 G 47/34, 22.03.72 (прототип).
fe г
19
ЧЛ
fe-16
13
±1И.
