(54) УСТРОЙСТВО ДЛЯ СТАЛКИВАНИЯ ШТУЧНЫХ ГРУЗОВ
С КОНВЕЙЕРА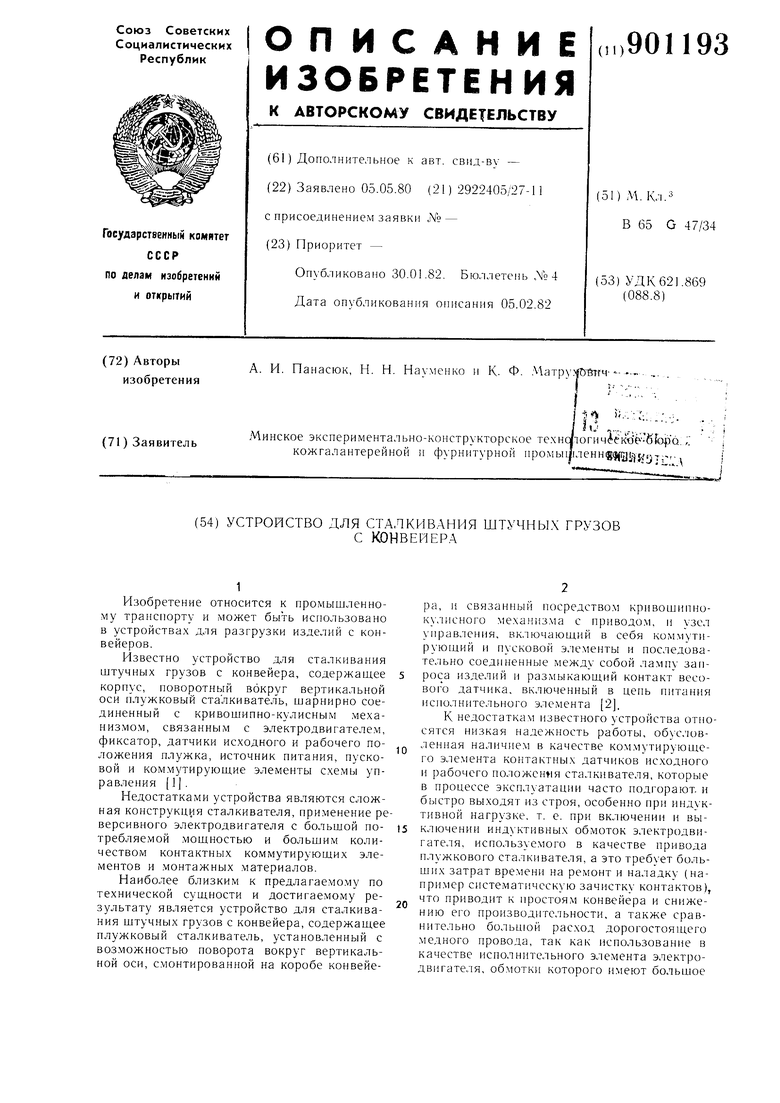
1
Изобретение относится к промышленному транспорту и может быть использовано в устройствах для разгрузки изделий с конвейеров.
Известно устройство для сталкивания штучных грузов с конвейера, содержаш,ее
корпус, поворотный вокруг вертикальной оси плужковый сталкиватель, шарнирно соединенный с кривошипно-кулисным механиз.ю.м, связанным с электродвигателе., фиксатор, датчики исходного и рабочего положения плужка, источник питания, пусковой и коммутируюш,ие элементы схе.мы управления 1 .
Недостатками устройства являются сложная конструкция сталкивателя, при.менение реверсивного электродвигателя с большой потребляемой .мощностью и большим количеством контактных коммутирующих элементов и .монтажных материалов.
Наиболее близким к предлагаемому по технической сущности и достигае.мому результату является устройство для сталкивания штучных грузов с конвейера, содержащее плужковый сталкиватель, установленный с воз.можностью поворота вокруг вертикальной оси, смонтированной на коробе коивейера, и связанный носредство.м крнвошиннокулисного механизма с приводом, и узел иравления, включающий в себя коммутирующий и пусковой элементы и последовательно соединенные между собой лампу запроса изделий и размыкающий контакт весового датчика, включенный в цепь питания исиолнительного элемента 2.
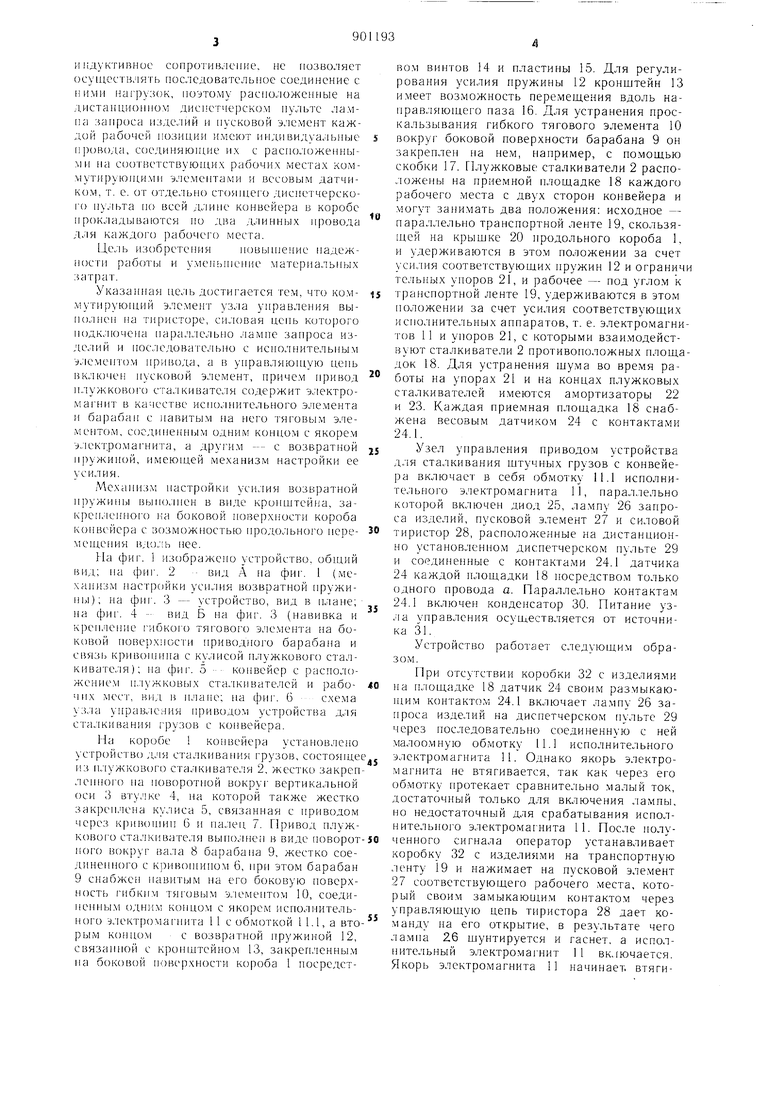
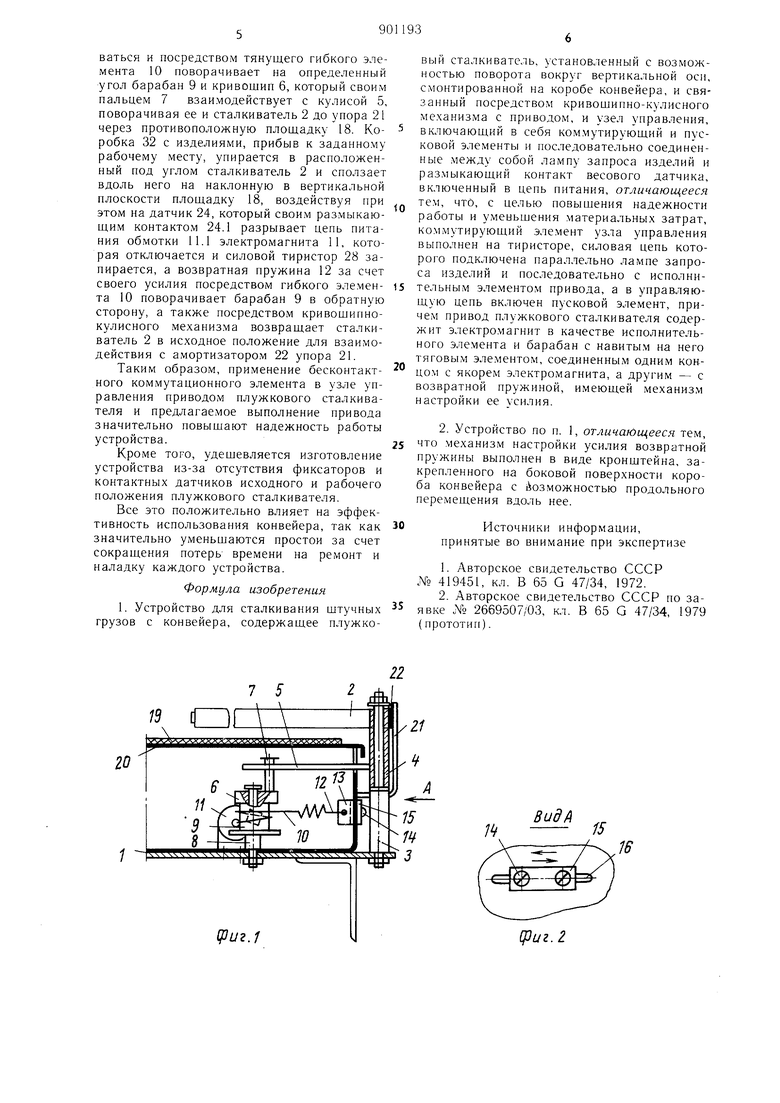
К недостаткам известного устройства относятся низкая надежность работы, обус.човленная наличием в качестве ко.м.мутирующе10го элемента контактных датчиков исходного и рабочего положен 1я сталкивателя, которые в процессе эксплуатации часто подгорают н быстро выходят из строя, особенно при индуктивной нагрузке, т. е. при включении и выключении индуктивных обмоток электродви15гателя, используе.мого в качестве привода плужкового сталкивателя, а это требует больших затрат вре.мени на ремонт и наладку (напри.мер систематнческ ю зачистку контактов), что приводит к простоям конвейера и сниже20нию его производительности, а также сравнительно большой расход дорогостоящего медного провода, так как использование в качестве исполнительного элемента электродвигателя, об.мотки которого и.меют большое индуктивное сопротивление, не позволяет осуществлять последовательное соединение с ними нагрузок, ноэтому рас11о;1ожен:ные на дистанционном диснетче)ском нульте ;ia.iна запроса изделий и нускоЕ5ой элемент каждой рабочей иознции имеют ннднви;1уалынз1е провода, соединяюи1ие их с расно.юженны |н на соответствующих рабочих местах коммутирующимн э.чементами и весовым датчиком, т. е. от отде.чьно стояи1его днсиетчерско|о ну.1ьта но всей д;1ине конвейера в коробе нрокладываютея ио два длинных провода для каждо1Ч) рабочего места. Цель изобретения повьинение падежноети рабслчм и умеиьи1еиие материальных затрат. Указанная цель достигаетея те.м, что ко.ммутируюн1ий элемент узла управления вынолнеп на т1-;ристоре, силовая цень которого нодк;ночепа нара„члельно лампе запроса изделий и поеледова1ельпо с исполнительным эле.ментом привода, а в управляюп1ую цепь включен пусковой элемент, причем привод п.: ужково1о ста.лкивате.тя содержит электромагнит в качестве ис11о;1нительного эле.мента н бараба е навитым на него тяговым элементом, еоединенри)1м одним конно.м с якорем э.лект.ро.магнита, а други.м --- с возвратной пружиной, имею1цей механизм настройки ее усилия. Л еханизм настройки уси-лия возвратной пружн |ы 1 Ы11олпен в виде кропштейна, закренленно1о на боковой поверхности короба конвейера е возможностью нродо;1ьпого неремеихення вдо;;ь нее. Ма фиг. 1 изображено устройство, обилий вид; на фи|-. 2 - вид А на фиг. I (механизм настройки уси;1ня возвратной нружины); на фиг. 3 - устройство, вид в нлане; на фиг. 4 - вид Б на фиг. 3 (навивка и кренление гибкого тягового эле.мента на боковой иоверхюсти приводного барабана и С1И131) кривоплина с кулисой плужкового сталкнвате.ля); на фиг. 5 - конвейер с расноложением п.лужков)ГХ ета.лкивателей и рабочих месл, вид в нлане; на фиг. 6 схема уз.ла унравленик приводо.м устройстЕш для слалкивания -рузов е конвейера. На коробе 1 конвейера установлено уетр(:1Йелво для сталкнвания грузов, состояще из нлужкового ста.н ивателя 2, жеетко закреп ле1НК)го иа новоротной вокру вертикальной оси 3 втулке 4, на которой также жестко закренлена кулиса 5, связанная с приводом через кривон1ин 6 и налец 7. Привод нлужкового сталкивателя выно;н1ен в виде поворот ного вокруг вала 8 барабана 9, жеетко соединенного с кривонп-пюм 6, нри этом барабан 9 снабжен навитым на его боковую поверхность гибким тяговы.м э.лементом 10, соединенным одним концом с якорем исполнительного э.лектромагнита 11 с обмоткой 1 1.1, а вто рым к()нщ)м с возвратной пружиной 12, связанной с кронштейном 13, закреп.ленны.м на боковой поверхности короба 1 носредством винтов 14 и пластины It). Для регулирования усилия пружины 12 кронштейн 13 и.меет возможность перемещения вдоль направляющего паза 16. Для устранения проскальзывания гибкого тягового элемента 10 вокруг боковой поверхности барабана 9 он закреплен на нем, например, с помощью скобки 17. Плужковые еталкиватели 2 расположены на приемной площадке 18 каждого рабочего места с двух сторон конвейера и могут занимать два положения: исходное - параллельно транспортной ленте 19, скользящей на крыщке 20 продольного короба 1, и удерживаются в это.м ноложении за счет усилия соответствующих пружин 12 и ограничи тельных упоров 21, и рабочее - под угло.м к транснортной ленте 19, удерживаются в этом ноложении за счет усилия соответствующих исно.лнительиых аппаратов, т. е. электромагнитов 11 и упоров 21, с которыми взаи.модействуют еталкиватели 2 нротивоноложных нлощадок 18. Для устранения щу.ма во время работы на упорах 21 и на концах плужковых сталкивателей имеются амортизаторы 22 и 23. Каждая приемная площадка 18 снабжена весовым датчиком 24 с контактами 24.1. Узел управления приводо.м устройства для сталкивания штучных грузов с конвейера включает в себя обмотку 11.1 исполнительного электромагнита 11, параллельно которой включен диод 25, ла.мцу 26 запроса изделий, нусковой элемент 27 и силовой тиристор 28, расноложенные на дистанционно установленном диспетчерском нульте 29 и соединенные с контактами 24.1 датчика 24 каждой нлощадки 18 носредство.м только одного провода а. Параллельно контактам 24.1 включен конденсатор 30. Питание уз,ла управления осуществляется от источника 31. Устройство работает следующи.м образом. При отсутствии коробки 32 с изделиями иа площадке 18 датчик 24 своим размыкаюHuiM контактом 24.1 включает ла.мпу 26 запроса изделий на диспетчерском нульте 29 через нос.ледовательно еоединенную с ней малоо.мную обмотку 11.1 иенолнительного электромагиита 11. Однако якорь электромагнита не втягивается, так как через его об.мотку протекает сравнительно .малый ток, достаточный только для включения ламны, но недостаточный для срабатывания исполнительного электромагнита 11. После нолученного сигнала оператор устанавливает коробку 32 с изделия.ми на транепортную ленту 19 и нажимает на пуековой элемент 27 соответствующего рабочего места, который свои.м замыкаюц.1им контакто.м через управляющую цепь тиристора 28 дает команду на его открытие, в результате чего ламна 26 щунтируется и гаснет, а исполнительный электрома1-нит 1 1 включается. Якорь электромагнита 11 начинает, втягиваться и посредством тянущего гибкого элемента 10 поворачивает на определенный угол барабан 9 и кривошип 6, который своим пальцем 7 взаимодействует с кулисой 5, поворачивая ее и сталкиватель 2 до упора 21 через противоположную площадку 18. Коробка 32 с изделиями, прибыв к заданному рабочему месту, упирается в расположенный под углом сталкиватель 2 и сползает вдоль него на наклонную в вертикальной плоскости площадку 18, воздействуя при 3TOiM на датчик 24, который своим размь кающим контактом 24.1 разрывает цепь питания обмотки 11.1 электромагнита 11, которая отключается и силовой тиристор 28 запирается, а возвратная пружина 12 за счет своего усилия посредством гибкого элемента 10 поворачивает барабан 9 в обратную сторону, а также посредством кривощипнокулисного механизма возвращает сталкиватель 2 в исходное положение для взаимодействия с амортизатором 22 упора 21. Таким образом, применение бесконтактного коммутационного элемента в узле управления приводом плужкового сталкивателя и предлагаемое выполнение привода значительно повышают надежность работы устройства. Кроме того, удещевляется изготовление устройства из-за отсутствия фиксаторов и контактных датчиков исходного и рабочего положения плужкового сталкивателя. Все это положительно влияет на эффективность использования конвейера, так как значительно уменьщаются простои за счет сокращения потерь времени на ремонт и наладку каждого устройства. Формула изобретения 1. Устройство для сталкивания штучных грузов с конвейера, содержащее плужкоВЫЙ сталкиватель, установленный с возможностью поворота вокруг вертикальной оси, смонтированной на коробе конвейера, и связанный посредством кривощипно-кулисного механизма с приводом, и узел управления, включающий в себя коммутирующий и пусковой элементы и последовательно соединенные между собой лампу запроса изделий и размыкающий контакт весового датчика, включенный в цепь питания, отличающееся тем, что, с целью повыщения надежности работы и уменьшения материальных затрат, коммутирующий элемент узла управления выполнен на тиристоре, силовая цепь которого подключена параллельно лампе запроса изделий и последовательно с исполнительным элементом привода, а в управляющую цепь включен пусковой элемент, причем привод плужкового сталкивателя содержит электромагнит в качестве исполнительного элемента и барабан с навиты.м на него тяговым элементом, соединенным одним концом с якорем электромагнита, а другим - с возвратной пружиной, имеющей механизм настройки ее усилия. 2. Устройство по п. 1, отличающееся тем, что механизм настройки усилия возвратной пружины выполнен в виде кронштейна, закрепленного на боковой поверхности короба конвейера с возможностью продольного перемещения вдоль нее. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 419451, кл. В 65 G 47/34, 1972. 2.Авторское свидетельство СССР по заявке № 2669507/03, кл. В 65 G 47/34, 1979 (прототип).
Зид/1
/
риг.2
(риг.З
ВидВ
fO
х
S 7
Ф
az.ii
,
гц
-г 21 22
18
