(54) УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ И РАЗГРУЗКИ ЛЮЛЕЧНОГО ЭЛЕВАТОРА ШТ57ЧНЫМИ ГРУЗАМИ


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для транспортировки и загрузки штучных грузов | 1988 |
|
SU1518242A1 |
| Устройство для перемещения и автоматической перегрузки штучных грузов | 1987 |
|
SU1481154A1 |
| Устройство для управления конвейерной системой | 1984 |
|
SU1240706A1 |
| Система управления процессом заполнения пода хлебопекарной печи в линиях по производству подовых хлебобулочных изделий | 1974 |
|
SU559689A1 |
| Люлечный элеватор | 1986 |
|
SU1406082A1 |
| Установка для автоматической перегрузки керамических изделий | 1981 |
|
SU988565A1 |
| Люлечный элеватор | 1977 |
|
SU621619A1 |
| Распределительный конвейер | 1962 |
|
SU151962A1 |
| ШКАФ ДЛЯ РАССТОЙКИ ТЕСТОВЫХ ЗАГОТОВОК | 1973 |
|
SU368843A1 |
| АГРЕГАТ ДЛЯ ПОДАЧИ ТОВАРОВ В ПОДДОНАХ И ИМ ПОДОБНОЙ ТАРЕ ИЗ ПОДСОБНЫХ ПОМЕЩЕНИЙ В ТОРГОВЫЙ ЗАЛ | 1969 |
|
SU239848A1 |
1
Изобретение относится к промышленному транспорту, а именно к устройствам для загрузки и разгрузки элеватора штучными грузами.
Известно устройство для загрузки и разгрузки элеватора штучными грузами, содержащее подающий конвейер, примыкающий к элеватору, отсекатель перемещающихся по конвейеру грузов, установленный перед элеватором, и электрическую схему управления приводами 1.
Однако устройство может рыботать на позиции загрузки только для загрузки грузов, кроме того в нем отсутствует контроль правильного положения груза, что может привести к полрмкам, опрокидыванию и повреждению грузов.
Известно также устройство для загрузки и разгрузки элеватора штучными грузами, содержащее подающий конвейер, примыкающий к двухсекционному рольгангу с приводными роликами, основная секция которого расположена в щахте элеватора, а другая - вспомогательная - перед элеватором, отсекатель перемещающихся по рольгангу грузов, установленный перед элеватором, и электрическую схему управления, в которую
включено реле управления приводом элеватора 2.
Однако устройство имеет ограниченные возможности применения, так как в силу конструктивных особенностей двухсекционного рольганга (его основная секция выполнена наклонной, а элеватор может перемещать грузы только в одну сторону) на рабочей позиции можно выполнять только автоматическую загрузку люлек элеватора и отсутствует возможность осуществлять их
10 автоматическую разгрузку, что значительно снижает производительность и эффективность использования элеватора. Кроме того, отсекатель грузов и привод элеватора испытывают чрезмерно большие нагрузки, особенно когда на них воздействует .целый поток
15 соприкасающихся грузов, и тем более при повороте и подъеме рычага отсекателя, когда необходимо сместить все соприкасающиеся грузы назад и тем дальше, чем больше высота грузов, при этом транспортирующие
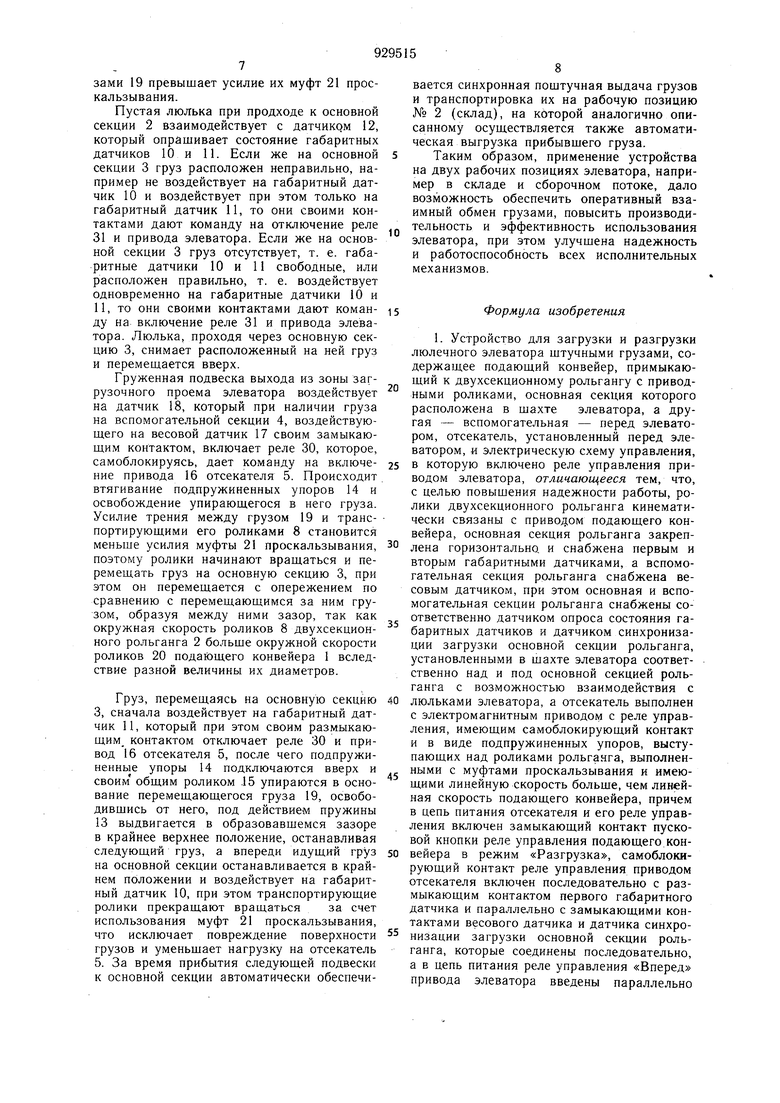
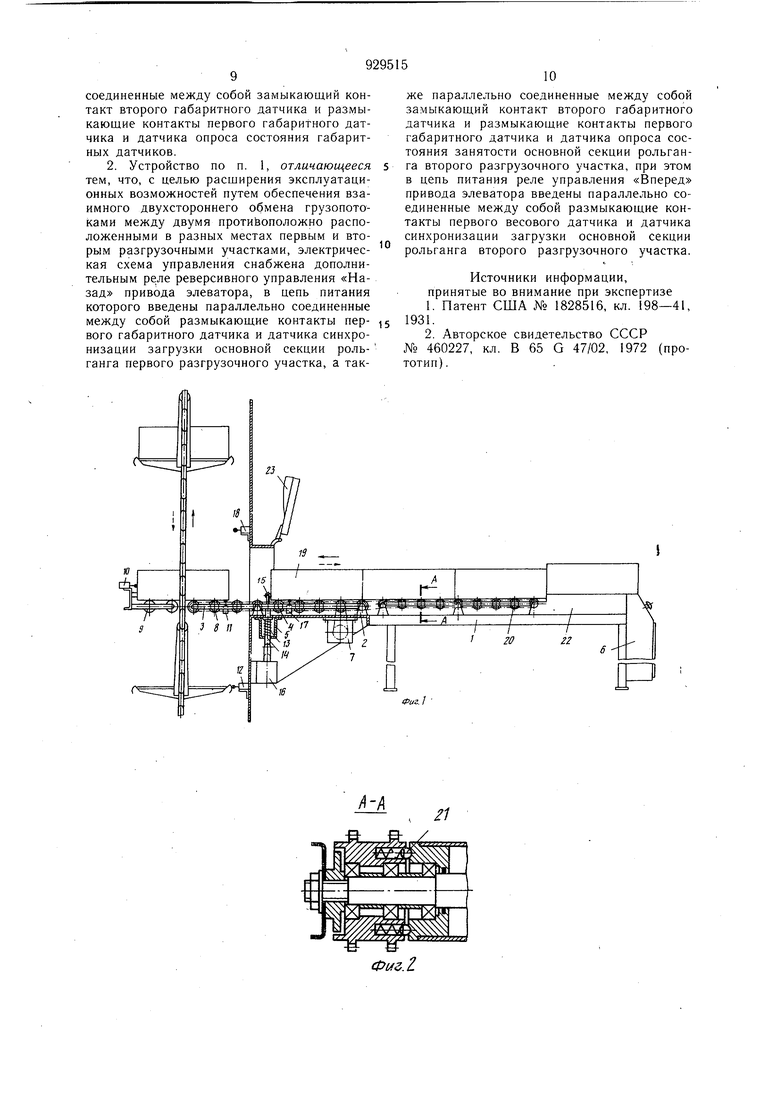
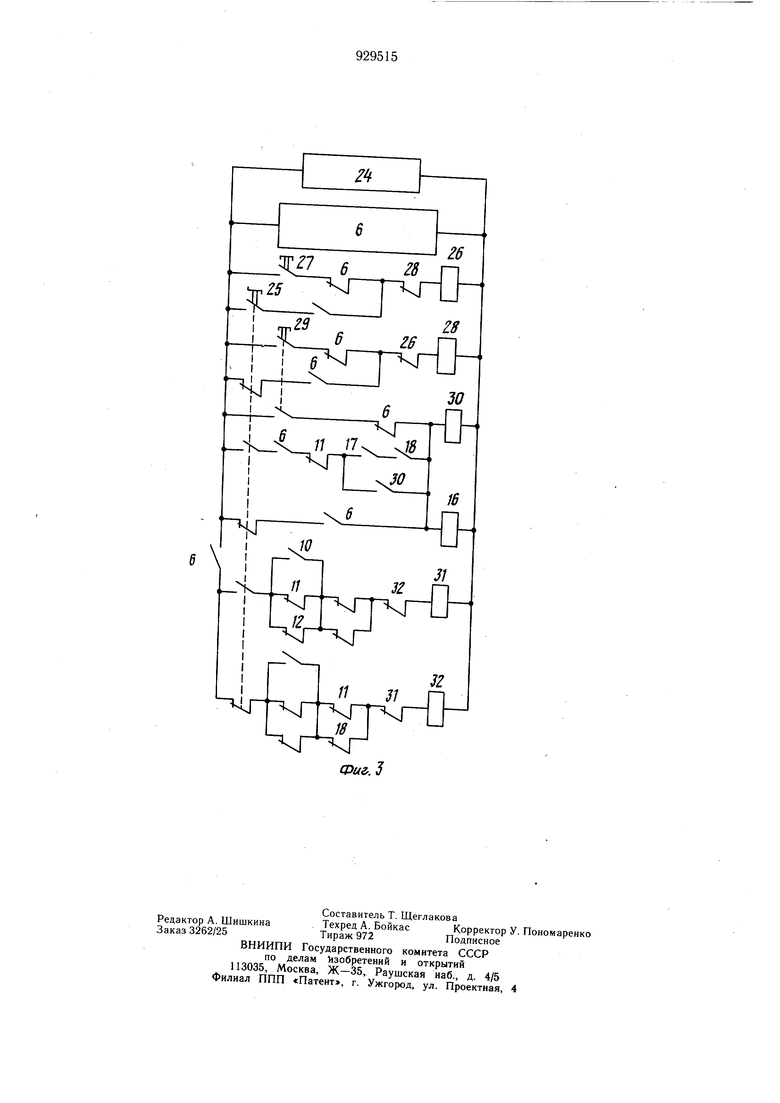
20 ролики двухсекционного рольганга и подающего конвейера оказывают сильное воздействие на грузы, так как они контактируют с ними и все время находятся в непрерывном вращении, что приводит к частому выходу из строя исполнительных механизмов и снижению производительности, а также повреждению поверхности грузов. В этом устройстве отсутствует контроль правильного расположения груза на основной (наклонной) секции рольганга и нет блокировки с приводом элеватора, что может привести к поломкам, опрокидыванию и повреждению грузов, т. е. к аварийным ситуациям, отсутствует также возможность контроля синхронной поштучной загрузки люлек элеватора, так как отсекатель каждый раз срабатывает механически независимо от наличия груза на вспомогательной (горизонтальной) секции рольганга и для него не обеспечивается гарантированный зазор между грузами особенно при непрерывном их истоке, что может привести к одновременной подаче нескольких грузов на основную (наклонную) секцию рольганга в шахту элеватора. Цель изобретения - повышение надежности работы. Поставленная цель достигается тем, что ролики двухсекционного рольганга кинематически связаны с приводом подающего конвейера, основная секция рольганга закреплена горизонтально и снабжена первым и вторым габаритными датчиками, а вспомогательная секция рольганга снабжена весовым датчиком, при этом основная и вспомогательная секции рольганга снабжены соответственно датчиком опроса состояния габаритных датчиков и датчиком синхронизации загрузки основной секции рольганга, установленными в шахте элеватора соответственно над и под основной секцией рольганга с возможностью взаимодействия с люльками элеватора, а отсекатель выполнен с электромагнитным приводом с реле управления, имеющим самоблокирующий контакт и в виде подпружиненных упоров, выступающих над роликами рольганга, выполненными с муфтами проскальзывания и имеющими линейную скорость больше, чем линейная скорость подающего конвейера, причем в цепь питания привода отсекателя и его реле управления включен замыкающий контакт пусковой кнопки реле управления подающего конвейера в режиме «Разгрузка, самоблокирующий контакт реле управления приводом отсекателя включен последовательно с размыкающим контактом первого габаритного датчика и параллельно замыкающими контактами весового датчика и датчика синхронизации загрузки основной секции рольганга, которые соединены последовательно, а в цепь питания реле управления «Вперед привода элеватора введены параллельно соединенные между собой замыкающий контакт второго габаритного датчика и размыкающие контакты первого габаритного датчика и датчика опроса состояния габаритных датчиков. Кроме тбго, с целью расщирения эксплуатационных возможностей транспортной системы путем обеспечения взаимного двухстороннего обмена грузопотоками между двумя противоположно расположенными в разных местах первым и вторым разгрузочными участками, электрическая схема управления снабжена дополнительными реле реверсивного управления «Назад привода элеватора в цепь питания которого введены параллельно соединенные между собой размыкающие контакты первого габаритного датчика и датчика синхронизации загрузки основной секции рольганга первого разгрузочного участка, а также параллельно соединенные между собой замыкающий контакт второго габаритного датчика и размыкающие контакты первого габаритного датчика и датчика опроса состояния занятости основной секции рольганга второго разгрузочного участка, при этом в цепь питания реле управления «Вперед привода элеватора также введены параллельно соединенные между собой размыкающие контакты первого весового датчика и датчика синхронизации загрузки основной секции рольганга второго разгрузочного участка. На фиг. 1 схематически изображено устройство на рабочей позиции № 1 (рабочая позиция № 2 не показана)( общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 схема управления загрузочно-разгрузочными механизмами рабочей позиции № 1 (для рабочей позиции № 2 схема управления аналогична). Устройство для загрузки и разгрузки элеватора штучными грузами на рабочей позиции № 1 содержит подающий конвейер 1, например роликовый, двухсекционный рольганг 2 с основной секцией 3 в шахте элеватора и вспомогательной секцией 4 перед элеватором, отсекатель 5 перемещающихся по рольгангу грузов, а также пульт 6 управления с сигнальной предупредительной, контрольно-измерительной и коммутирующей аппаратурой. Двухсекционный рольганг 2 имеет общий с подающим конвейером 1 реверсивно управляемый привод 7, причем его основная секция 3 имеет одну половину приводных транспортирующих роликов 8 и вторую половину свободно вращающихся роликов 9 и снабжена габаритными датчиками 10 и 11 и датчиком 12 опроса их состояния, сблокированных с приводом элеватора, а отсекатель 5, расположенный под рольгангом 2 на вспомогательной секции 4, выполнен в виде выступающих над транспортирующими роликами 8 за счет пружин 13 упоров 14, соединенных вверху общим свободно вращающимся роликом 15, а его нижний конец соединен с тяговыл приводом 16, например электромагнитным, сблокированным с весовым датчиком 17, габаритным датчиком 11 и датчиком 18 синхронизации загрузки и разгрузки люлек элеватора. Для уменьшения нагрузки на отсекатель 5 и исключения повреждения грузов 19, например картонных коробок, транспортирующие ролики 8 двухсекционного рольганга 2 и транспортирующие ролики 20 подающего конвейера 1 снабжены муфтами 21 проскальзывания, а для обеспечения отсекателю 5 гарантированного зазора между следующими грузами 19 диаметр транспортирующих роликов 8 двухсекционного рольганга 2 превыщает диаметр транспортирующих роликов 20 подающего конвейера 1, что обеспечивает больщую линейную скорость груза на рольганге. Подающий конвейер 1 в рабочей зоне имеет несколько возвышающуюся с выступом стартовую площадку 22. Люлечный элеватор для закрытия проема на рабочей позиции № 1, также как и на рабочей позиции № 2, имеет ручного действия заслонку 23. Схема управления устройства рабочей позиции № 1 включает в себя источник 24 питания, бесконтактные датчики 10-12, 17 и 18 рабочей позиции № 1 и взаимно блокирующие их датчики рабочей позиции №2 (не показаны), силовой блок пульта 6 управления и его релейно-коммутационный блок, содержащий переключатель 25 режимов «Загрузка, «Разгрузка, реле 26 и кнопку 27 управления загрузкой подающего конвейера, реле 28 и кнопку 29 управления разгрузкой подающего конвейера, реле 30 управления приводом 16 отсекателя, реле 31 управления приводом элеватора при разгрузке его люлек, реле 32 управления приводом элеватора при разгрузке его люлек. Устройство работает следующим образом Если, например, с рабочей позиции № 2 (склада) поступил предупреждающий пульсирующий звуковой сигнал на отправление груза, то оператор рабочей позиции № 1 обязан подготовить подающий конвейер 1 и двухсекционный рольганг 2 к приемке груза, т. е. освободить их. Для этого он в наладочном режиме с помощью толчковой кнопки 29, реле 28 и 30 дает команду на включение привода 7 двухсекционного рольГанга 2 и подающего конвейера 1, а также на включение привода 16 отсекателя 5. Происходит втягивание подпружиненных упоров 14 и включение транспортирующих роликов 8 и 20 для разгрузки груза 19. Груз один за другим поступает к стартовой площадке 22, где он задерживается, упираясь в выступ, а затем снимается. После освобождения двухсекционного рольганга 2 и подающего конвейера 1 оператор устанавливает переключатель 25 в положение «Разгрузка люлек элеватора и дает команду на отключение предупреждающей пульсирующей звуковой сигнализации и включение схемы управления в автоматический режим. Силовой блок пульта 6 управления своими замыкающими контактами включет реле 28 и привод 7, реле 30 и привод 16 отсекателя 5, реле 32 и привод элеватрра. Происходит втягивание подпружиненных упоров 14 и вращение транспортирующих роликов 8 и 20 разгрузки люлек элеватора, перемещающихся в данном случае вниз, а на рабочей позиции N° 2 аналогичные ролики (не показаны) вращаются в обратную сторону, т. е. для загрузки лю-. лек элеватора. Груженная люлька при подходе к основной секции 3 взаимодействует с датчиком 18, который своим размыкающим контактом опрашивает состояние габаритного датчика 11. Если же на основной секции 3 находится груз, то датчик 11 своим размыкающим контактом дает команду на отключение реле 32 и привода элеватора, т. е. останов, а если на основной секции 3 отсутствует груз, то датчик 11 своим размыкающим контактом дает команду на включение привода элеватора. Люлька проходит беспрепятственно, а груз, останавливаясь на основной секции 3, подхватывается вначале транспортирующими роликами 8, а затем роликами 20 и перемещается до выступа со стартовой площадкой 22, где его снимает оператор для отправления на сборочный поток. Таким образом происходит непрерывная разгрузка люлек элеватора. Если же груз необходимо отправить с рабочей позиции № I на рабочую позицию № 2, то оператор с помощью толчковой кнопки 27 и реле 26 осуществляет включение привода 7 для индивидуальной независимой загрузки и обеспечивает предварительное накопление груза на вспомогательной секции 4 рольганга 2 и подающего конвейера 1. После этого переклю.чатель 25 устанавливается в положение «Загрузка люлек элеватора, подготавливается схема управления для автоматического режима и дается команда на включение предупредительной пульсирующей звуковой сигнализации на рабочей позиции № 2 (склада). После подготовки на рабочей позиции № 2 двухсекционного рольганга и подающего конвейера (не показана) подается команда на отключение предупредительной звуковой пульсирующей сигнализации и включение схемы управления в автоматический режим. Блок своими замыкающими контактами включает реле 26 и привод 7 рольганга и подающего конвейера реле 32 и привод элеватора. Происходит перемещение люлек элеватора вверх, а транспортирующие ролики 8 основной секции вращаются для загрузки люлек, при этом остальные транспортирующие ролики не вращаются, работают только муфты 21 проскальзывания, так как перемещению грузов 19 препятствуют упоры 14, в результате чего сила трения между транспортирующими роликами 8 и 20 и грузами 19 превышает усилие их муфт 21 проскальзывания.
Пустая люлька при продходе к основной секции 2 взаимодействует с датчиком 12, который опрашивает состояние габаритных датчиков 10 и 11. Если же на основной секции 3 груз расположен неправильно, например не воздействует на габаритный датчик 10 и воздействует при этом только на габаритный датчик 11, то они своими контактами дают команду на отключение реле 31 и привода элеватора. Если же на основной секции 3 груз отсутствует, т. е. габаритные датчики 10 и 11 свободные, или расположен правильно, т. е. воздействует одновременно на габаритные датчики 10 и 11, то они своими контактами дают команду на включение реле 31 и привода элеватора. Люлька, проходя через основную секцию 3, снимает расположенный на ней груз и перемещается вверх.
Груженная подвеска выхода из зоны загрузочного проема элеватора воздействует на датчик 18, который при наличии груза на вспомогательной секции 4, воздействующего на весовой датчик 17 своим замыкающим контактом, включает реле 30, которое, самоблокируясь, дает команду на включение привода 16 отсекателя 5. Происходит втягивание подпружиненных упоров 14 и освобождение упирающегося в него груза. Усилие трения между грузом 19 и транспортирующими его роликами 8 становится меньше усилия муфты 21 проскальзывания, поэтому ролики начинают вращаться и перемещать груз на основную секцию 3, при этом он перемещается с опережением по сравнению с перемещающимся за ним грузом, образуя между ними зазор, так как окружная скорость роликов 8 двухсекционного рольганга 2 больше окружной скорости роликов 20 подающего конвейера 1 вследствие разной величины их диаметров.
Груз, перемещаясь на основную секцию 3, сначала воздействует на габаритный датчик И, который при этом своим размыкающим контактом отключает реле 30 и привод 16 отсекателя 5, после чего подпружиненные упоры 14 подключаются вверх и своим общим роликом .15 упираются в основание перемещающегося груза 19, освободившись от него, под действием пружины 13 выдвигается в образовавшемся зазоре в крайнее верхнее положение, останавливая следующий груз, а впереди идущий груз на основной секции останавливается в крайнем положении и воздействует на габаритный датчик 10, при этом транспортирующие ролики прекращают вращаться за счет использования муфт 21 проскальзывания, что исключает повреждение поверхности грузов и уменьшает нагрузку на отсекатель 5. За время прибытия следующей подвески к основной секции автоматически обеспечивается синхронная поштучная выдача грузов и транспортировка их на рабочую позицию № 2 (склад), на кбторой аналогично описанному осуществляется также автоматическая выгрузка прибывщего груза.
Таким образом, применение устройства на двух рабочих позициях элеватора, например в складе и сборочном потоке, дало возможность обеспечить оперативный взаимный обмен грузами, повысить производительность и эффективность использования элеватора, при этом улучщена надежность и работоспособность всех исполнительных механизмов.
Формула изобретения
