Известны вилочные автопогрузчики с тросовым приводом для выдвижения телескопической рамы, предназначенные для перевозки прузов и ПОДНЯТИЯ их с площадки склада на высоту.
Предлагаемый автопогрузчик с телескопической рамой и (вилочным или иным захватом преследует цель подъема грузов с площадки, расположенной ниже уровня площади опоры колес автопогрузчика, причем каретка захвата при опускании ее вниз остается неизменно на нижнем конце звена телескопической рамы.
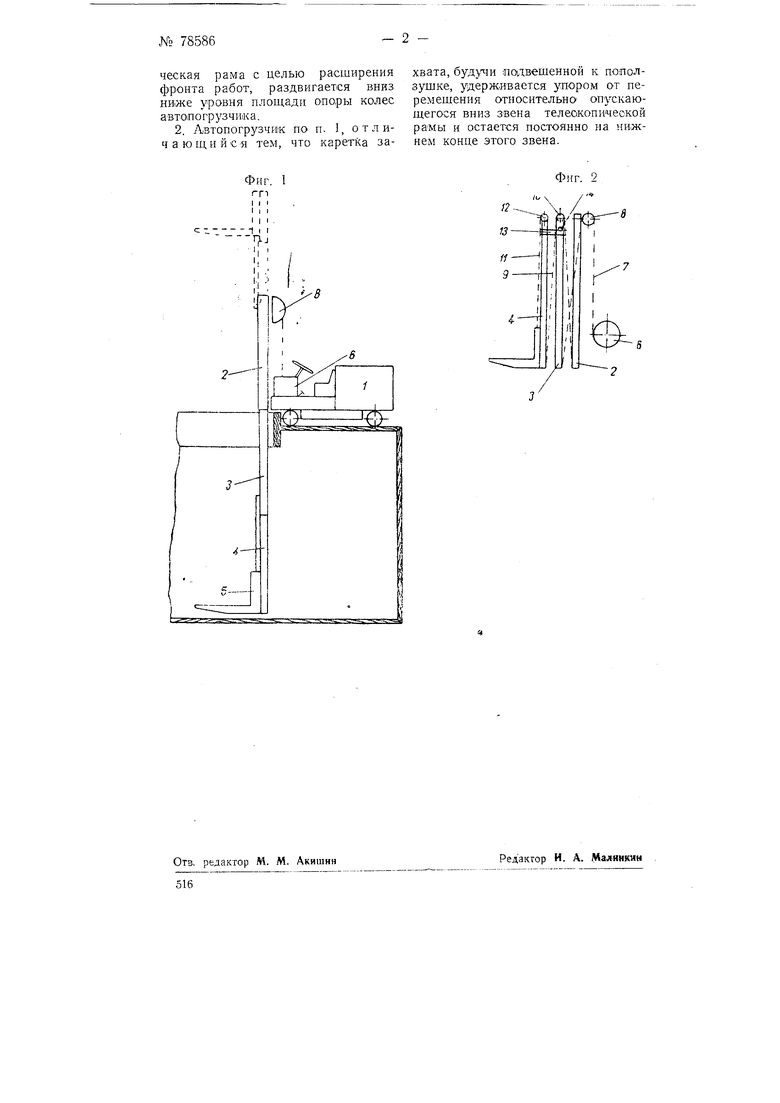
На фиг. 1 изображен боковой вид полрузчнка с раздвинутой вниз телебколич;еской рамюй; на фиг. 2-схема устройства раздвижного механизма телескопической рамы.
Впереди моторной повозки 1 (фиг. 1) укреплена телескопичеокая рама, состоящая из неподвижного звена 2 и двух скользящих одно в другом звеньев 3 и 4. Е направляющих звена 4 перемещается каретка вилочного захвата 5.
Механизм выдвижения телеоколической рамы (фиг. 2) состоит из приводимого во вращение от двигателя повозки барабана 6, с наматывающимся на него тросом 7, за33
крепленным в нижнем конце звена 5 рамы и перекинутым через блок 8 неподвижного звена.
Концевое звено 4 рамы связано с непод;5ижным звеном 2 перекинутой через звездочку 10 среднего звена 3 .цепью 9, концы которой закреплены в нижних точках .концевого звена 4 и неподвижного звена 2 рамы.
Каретка вилочного захвата 5 связана цепью //, перекинутой через звездочку 12 звена 4, с поползушкой 13, деремещающейся по звеньям 3 и 4.
При наматывании троса 7 на барабан 6 поднимается звено 3 рамы, которое в свою очередь цепью 9 поднимает звено 4, а пополэушка 13, упираясь в упор 14 звена 3, заставляет подниматься каретку захвата 5.
Спуск рамы происходит под действием собственного веса, причем, начиная с собранного .положения рамы, каретка захвата 5, неизменно остается внизу звена 4 рамы.
Предмет изобретения
I. Автопогрузчик с раздвигающейся вверх и вниз телескопической рамой с вилочным или иным захватом и тросовым приводом, отличающийся тем, что телескопи515
ческая рама с целью расширения фронта работ, раздвигается вниз ниже уровня площади опоры колес автооогрузчика.
2. Автопогрузчик по п. 1, отличающийся тем, что каретка заФиг.
ГГ1
I I I
I I I
I I I -111
17
хвата, пагвещенной к поползушке, удерживается упором от перемешения относительно опускающегося вниз звена телескопической рамы и остается постоянно на нижнем конце этого звена.
Фиг. 2
11. X
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический захват для перегрузки штучных грузов | 1951 |
|
SU96674A1 |
| Телескопическое захватное устройство | 1986 |
|
SU1390133A1 |
| МОБИЛЬНОЕ УСТРОЙСТВО ДЛЯ СОРТИРОВКИ КРУГЛЫХ ЛЕСОМАТЕРИАЛОВ И ПОШТУЧНОЙ РАЗБОРКИ ИХ ПАЧЕК | 1990 |
|
RU2029639C1 |
| ВИЛОЧНЫЙ ПОГРУЗЧИК | 1991 |
|
RU2025462C1 |
| Телескопическая мачта с бесступенчатым одновременным подъемом всех секций | 1960 |
|
SU134724A1 |
| Погрузчик | 1977 |
|
SU667495A1 |
| НАВЕСНОЕ БУРОРЫХЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ПОГРУЗЧИКА | 1991 |
|
RU2011762C1 |
| Телескопический складской кран | 1975 |
|
SU662003A3 |
| ЭЛЕКТРОПОГРУЗЧИК | 1965 |
|
SU224371A1 |
| Возвратно-поступательный ножной привод для велосипеда | 2022 |
|
RU2780873C1 |
Н-Ш2
