(21)4101390/25-11
(22)02.06.86
(46) 23.04.88. Бюл. № 15
(71)Украинский филиал Государственного проектного и конструкторского института Союзпроммеханизация
(72)И.Н.Балинян и С.А.Вайсфлигель
(53)621.869(088.8)
(56)Заявка ФРГ № 2234015, кл. В 66 С 23/04, 1975.
(54)ТЕЛЕСКОПИЧЕСКОЕ ЗАХВАТНОЕ УСТРОЙСТВО
(57)Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в погрузочно- разгрузочных механизмах, работающих
в условиях ограниченного пространства и предназначенных, например, для загрузки контейнеров через боковую стенку. Цель изобретения - расширение
функциональных возможностей путем обеспечения вьщвижения подвижной секции в обе стороны. Телескопическое захватное устройство содержит неподвижную секцию (НС) 1, устанавливаемую на каком-либо механизме подъема, в ыдвижную секцию (ВС) 2, перемещающуюся относительно НС 1, и вилочный захват (ВЗ) 3, перемещающийся относительно ВС 2. На НС 1 установлен мотор-редуктор 6 с ведущей звездочкой 7 и цепью 9, которая огибает обводные звездочки 8 НС 1, обводные звездочки 25 и 26 ВС 2 и концы ее крепятся на каретке (К) 36 ВЗ 3. Корпус 40 ВЗ 3 может разворачиваться в горизонтальной плоскости рукоятками и на нем установлены раздвижные губки 50, 51 с рукояткой управления 48. Каретка 36 перемещается по направляющей ВС 2 на роликах 37. На левом конце
I
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Устройство для замены паковок патронами на веретенах кольцевой машины с непрерывным выпуском химических нитей | 1985 |
|
SU1341276A1 |
| Автооператор для транспортировки деталей | 1979 |
|
SU859782A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| СТРЕЛКОВОЕ ОРУЖИЕ С НЕПРЕРЫВНЫМ РЕЖИМОМ СТРЕЛЬБЫ (ВАРИАНТЫ), ФУНКЦИОНАЛЬНЫЕ УЗЛЫ СТРЕЛКОВОГО ОРУЖИЯ И СПОСОБ ОДНОВРЕМЕННОГО СНИЖЕНИЯ ОТДАЧИ И УРОВНЯ ЗВУКА СТРЕЛКОВОГО ОРУЖИЯ | 2003 |
|
RU2254539C1 |
| Стенд для сборки трубных пучков секций аппаратов воздушного охлаждения | 1984 |
|
SU1234150A1 |
| ФОРТОЧКА КАБИНЫ ЭКИПАЖА САМОЛЕТА | 2011 |
|
RU2475413C1 |
| Передвижной стенд для ремонта думпкаров | 1989 |
|
SU1673239A1 |

.п, X X
6FliteFp53r; J2
/.
, :
GO СО
00 СО
Фиг.
3S S
13
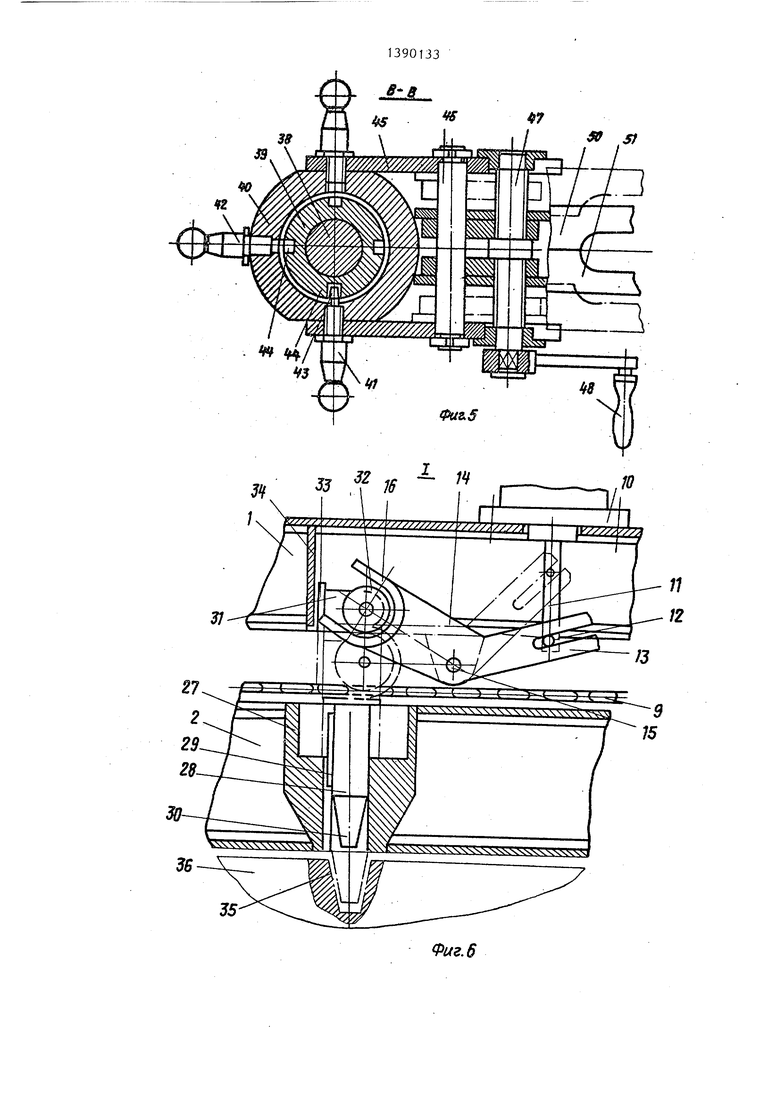
ВС 2 установлен-фиксатор 28, осуществляющий фиксацию ВС 2 относительно НС 1 при перемещении ВЗ 3 и ВЗ 3 относительно ВС 2 при их совместном перемещении. Фиксатор 28 приводится в действие штоком 11 электромагнита 10 через двуплечий рычаг 14, правое плечо которого снабжено пазом 13 для штифта 12, а левое с ловителем 16 для ролика 32 кронштейна 31. Секция
Изобретение относится к подъемно- транспортному машиностроению и может быть использовано в погрузочно-раз- грузочных механизмах, работающих в условиях ограниченного пространства, например, для загрузки контейнеров через боковую стенку.
Цель изобретения - расширение функциональных возможностей путем обеспечения выдвижения подвижной секции в обе стороны.
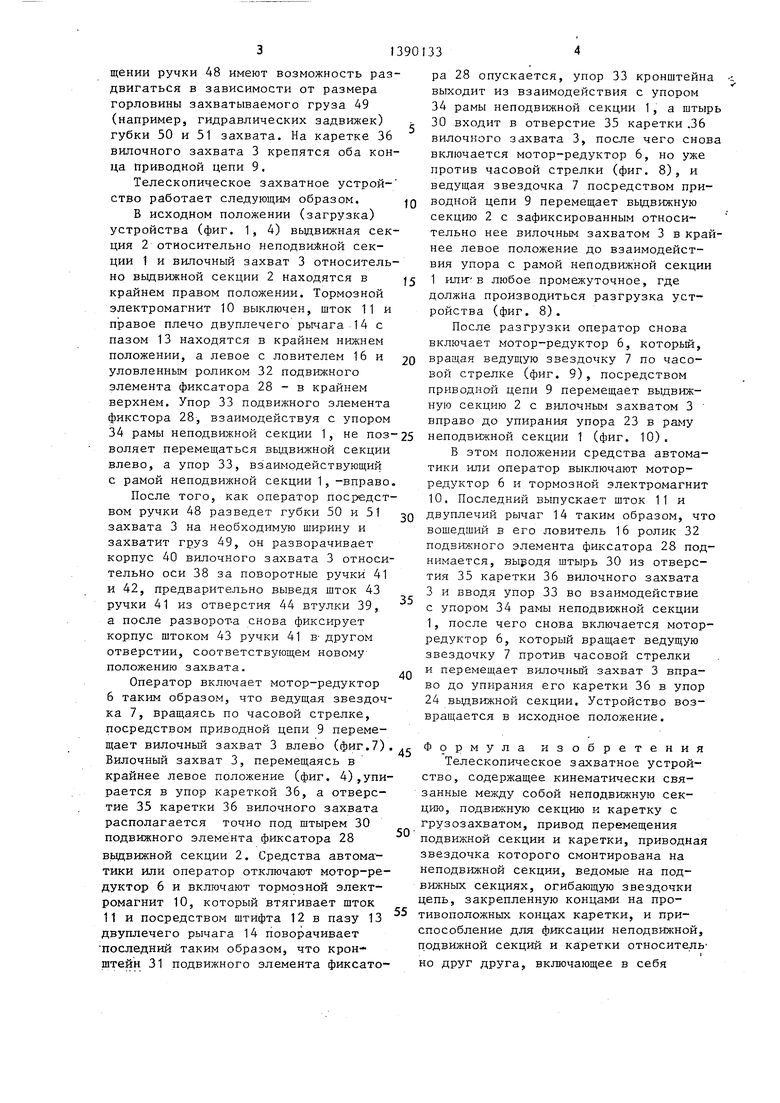
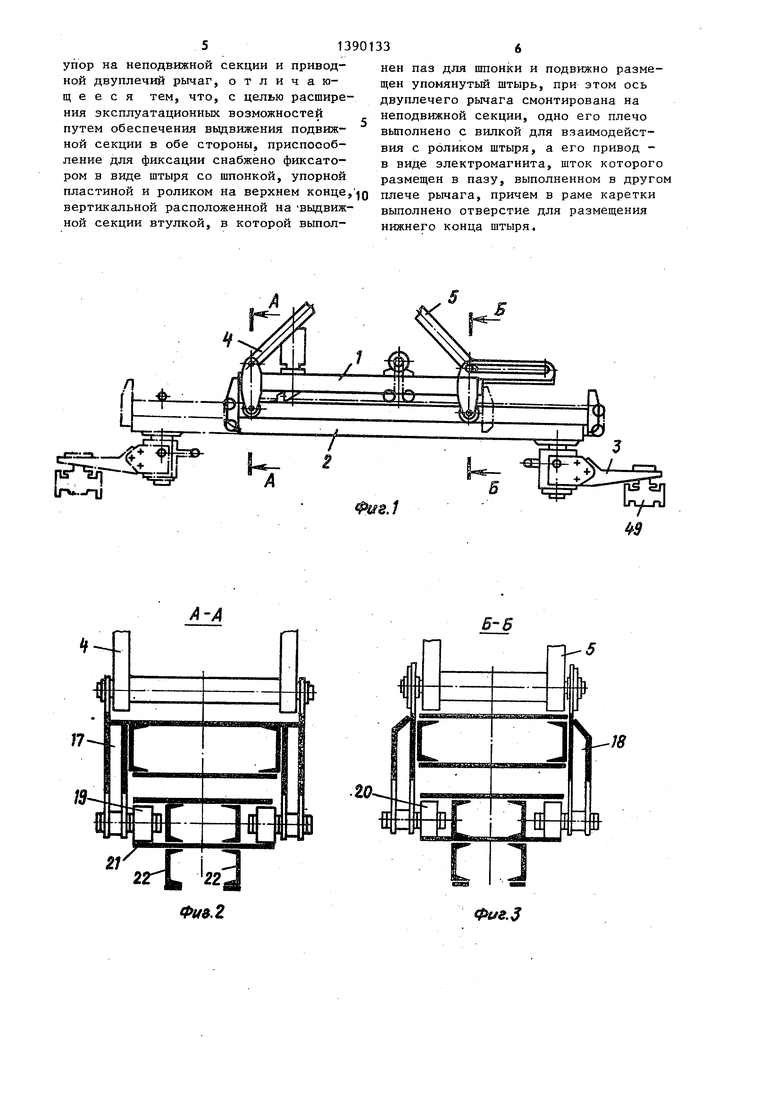
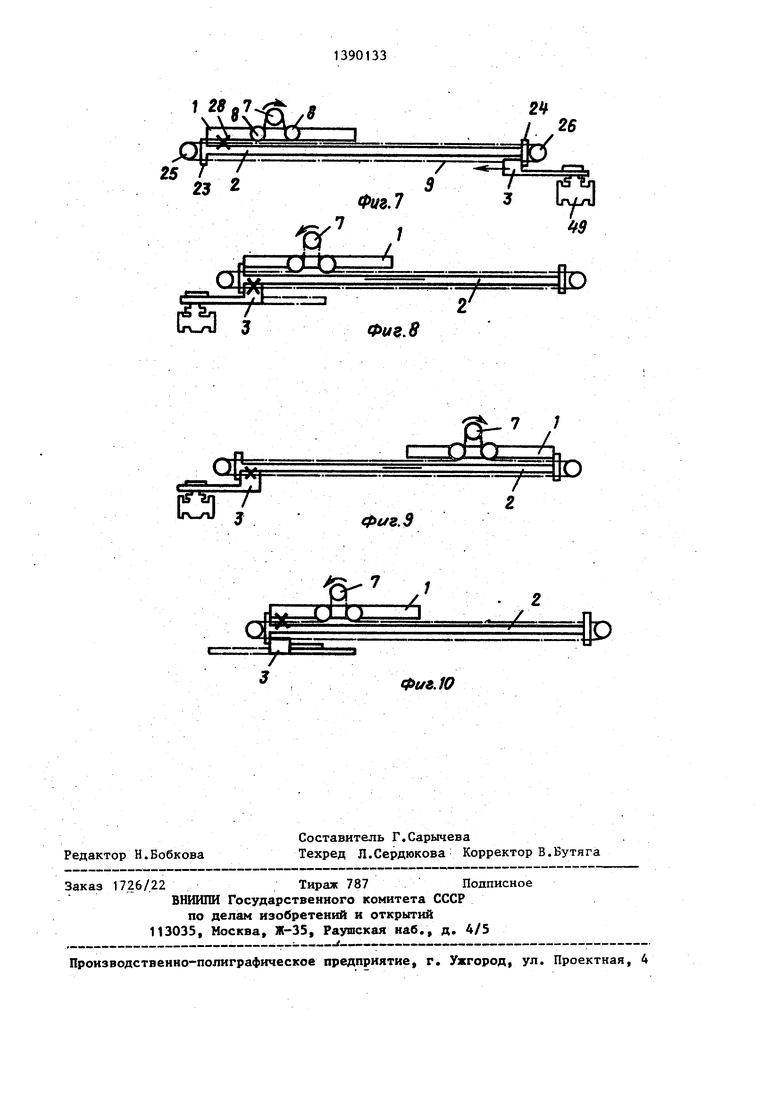
На фиг. 1 изображено телескопическое захватное устройство в двух положениях - крайнем правом (загрузка) и крайнем левом (разгрузка), общий вид; на фиг. 2 - разрез А-А на фиг.1 на фиг. 3 - разрез Б-В на фиг. 1; на фиг. 4 - устройство с детализацией основных элементов; на фиг. 5 - разрез В-В на фиг. 4 на фиг. 6 - узел I на фиг. 4; на фиг. 7-10 - схематическое изображение устройства в четырех характерных фазах рабочего цикла.
. Телескопическое захватное устройство содержит неподвижную секцию 1, вьщвижную секцию 2 и вилочный захват 3. На неподвижной секции 1, крепящейся к рычагам 4 и 5 механизма подъема, например, рычажного типа пантограф (не пока:зан) , установлены мотор- редуктор 6 (фиг. 4) с ведущей звездочкой 7 и двумя обводными звездочками 8, приводящими в движение приводную цепь 9. Приспособление для фиксации содержит тормозной электромагнит 10, шток 11 (фиг. 6), который посредством штифта 12 связан с пазом 13 двуплечего рычага 14, при помощи оси
2 имеет стакан, в котором размещается фиксатор 28 с направляющей шпонкой. Фиксатор 28 на верхнем конце снабжен кронштейном 31 с роликом 32, взаимодействующим с ловителем 16 и упором 33, взаимодействующим с упором 34, установленным на раме НС 1. Нижний конец фиксатора 28 снабжен штырем, взаимодействующим с кареткой 36 ВЗ 3. 10 ил.
15, закрепленной на раме неподвижной секции 1, левое плечо которого оснащено вилкой-ловителем 16. На кронштейнах 17 и 18 неподвижной секции 1
установлены ролики 19 и 20 (фиг. 2 и 3), входящие в направляющие 21 выдвижной секции 2, оснащенной также направляющими 22 для вилочного захвата 3, Кроме того, на выдвижной секции 2 закреплены постоянный 23 и
съемный 24 кронштейны (фиг. 4) с обводными звездочками 25 и 26 для приводной цепи 9 и стакан (втулка) 27 (фиг. 6), приспособление для фиксации, в котором установлен подвижный фиксатор 28 с направляющей шпонкой 29 и штырем 30 и кронштейном 31 с роликом 32 и упором 33, имеющими воз- можность взаимодействовать соответственно с вилкой-ловителем 16 двуплечего рычага 14 и с упором 34 рамы нё- подвижной секции 1, а штырь 30 при срабатьшании электромагнита 10 входит S отверстие 35 каретки 36 вилочного
захвата 3, ролики 37 (фиг. 4) которого входят в направляющие 22 выдвижной секции 2. На каретке 36 неподвижно закреплены ось 38 с втулкой 39 (фиг.5), на которых посредством подшипников
(не показаны) установлен корпус 40 вилочного захвата 3 с поворотными ручками 41 и 42, причем первая является фиксирующей, и шток 43 ее входит в одно из отверстий 44 втулки 39.Кроме того, на корпусе 40 имеются кронштейны 45, в которых установлены гладкие оси 46 и одна винтовая ось
47с левой и правой резьбой и ручкой
48на хвостовике, по которым при вращении ручки 48 имеют возможность раздвигаться в зависимости от размера горловины захватываемого груза 49 (например, гидравлических задвижек) губки 50 и 51 захвата. На каретке 36 вилочного захвата 3 крепятся оба конца приводной цепи 9,
Телескопическое захватное устройство работает следующим образом.
В исходном положении (загрузка) устройства (фиг. 1, 4) вьщвижная секция 2 относительно неподвижной секции 1 и вилочный захват 3 относительно вьщвижной секции 2 находятся в крайнем правом положении. Тормозной электромагнит 10 выключен, шток 11 и правое плечо двуплечего рычага 14 с пазом 13 находятся в крайнем нижнем положении, а левое с ловителем 16 и уловленным роликом 32 подвижного элемента фиксатора 28 - в крайнем верхнем. Упор 33 подвижного элемента фикстора 28, взаимодействуя с упором 34 рамы неподвижной секции 1, не позволяет перемещаться выдвижной секции влево, а упор 33, взаимодействующий с рамой неподвижной секции 1, -вправо
После того, как оператор посредством ручки 48 разведет губки 50 и 51 захвата 3 на необходимую ширину и захватит груз 49, он разворачивает корпус 40 вилочного захвата 3 относительно оси 38 за поворотные ручки 41 и 42, предварительно выведя шток 43 ручки 41 из отверстия 44 втулки 39, а после разворот-а снова фиксирует корпус штоком 43 ручки 41 в- другом отверстии, соответствующем новому положению захвата.
Оператор включает мотор-редуктор 6 таким образом, что ведущая звездочка 7, вращаясь по часовой стрелке, посредством приводной цепи 9 перемещает вилочный захват 3 влево (фиг,7) Вилочный захват 3, перемещаясь в крайнее левое положение (фиг. 4),упирается в упор кареткой 36, а отверстие 35 каретки 36 вилочного захвата располагается точно под штырем 30 подвижного элемента фиксатора 28 ввдвижной секции 2. Средства автоматики или оператор отключают мотор-редуктор 6 и включают тормозной электромагнит 10, который втягивает шток 11 и посредством штифта 12 в пазу 13 двуплечего рычага 14 поворачивает последний таким образом, что кронштейн 31 подвижного элемента фиксатора 28 опускается, упор 33 кронштейна выходит из взаимодействия с упором 34 рамы неподвижной секции 1, а штырь i- 30 входит в отверстие 35 каретки .36 вилочного захвата 3, после чего снова включается мотор-редуктор 6, но уже против часовой стрелки (фиг. 8), и ведущая звездочка 7 посредством приQ водной цепи 9 перемещает выдвижную секцию 2 с зафиксированным относительно нее вилочным захватом 3 в крайнее левое положение до взаимодействия упора с рамой неподвижной секции
5 1 или-в любое промежуточное, где должна производиться разгрузка устройства (фиг. 8).
После разгрузки оператор снова включает мотор-редуктор 6, который,
0 вращая ведущую звездочку 7 по часовой стрелке (фиг. 9), посредством приводной цепи 9 перемещает выдвижную секцию 2 с вилочным захватом 3 вправо до упирания упора 23 в раму
5 неподвижной секции 1 (фиг. 10).
В этом положении средства автоматики или оператор выключают мотор- редуктор 6 и тормозной электромагнит 10. Последний выпускает шток 11 и
0 двуплечий рычаг 14 таким образом, что вошедший в его ловитель 16 ролик 32 подвижного элемента фиксатора 28 поднимается, выродя штырь 30 из отверстия 35 каретки 36 вилочного захвата 3 и вводя упор 33 во взаимодействие с упором 34 рамы неподвижной секции 1, после чего снова включается мотор- редуктор 6, который вращает ведущую звездочку 7 против часовой стрелки
„ и перемеш.ает вилочный захват 3 вправо до упирания его каретки 36 в упор 24 выдвижной секции. Устройство возвращается в исходное положение.
5
Формула изобретения
Телескопическое захватное устройство, содержащее кинематически связанные между собой неподвижную секцию, подвижную секцию и каретку с грузозахватом, привод перемещения подвижной секции и каретки, приводная звездочка которого смонтирована на неподвижной секции, ведомые на подвижных секциях, огибающую звездочки цепь, закрепленную концами на про- тивоположных концах каретки, и приспособление для фиксации неподвижной, цодвижной секций и каретки относительно друг друга, включающее в себя
упор на неподвижной секции и приводной двуплечий рычаг, о т л и ч а ю- щ е е с я тем, что, с целью расширения эксплуатационных возможностей путем обеспечения выдвижения подвижной секции в обе стороны, приспособление для фиксации снабжено фиксатором в виде штыря со шпонкой, упорной пластиной и роликом на верхнем конце, вертикальной расположенной на выдвижной секции втулкой, в которой выполА-А
21
Фи9.2
нен паз для шпонки и подвижно размещен упомянутый штырь, при этом ось двуплечего рычага смонтирована на неподвижной секции, одно его плечо выполнено с вилкой для взаимодействия с роликом штыря, а его привод - в виде электромагнита, шток которого размещен в пазу, выполненном в друго плече рычага, причем в раме каретки выполнено отверстие для размещения нижнего конца штыря.
Фиг,3
36
35
«7
Л Sf
Фиг. 6
t .
IV
ЕЛ
R 7
2
Фие.8
фиг.З
Фиг. 10
