Существующие способы определения положений точек местности требуют применения начальных положений, без чего не может обойтись ни один из известных способов фототриангуляции.
Описываемый способ фототриангуляции не требует применения начальных направлений, что позволяет сократить продольные перекрытия снимков.
На фиг. 1-3 изображены схемы для определения положения точек местности, по предлагаемому способу.
В основу этого способа определения положений точек местности положены простые зависимости мажду углами: (угол, составленный направлением с горизонталью) и i (уго.т на местности, соответствующий углу -р ).
При этом расстояние па местности между точками С и С используется как базис для определения новых точек. Это расстояние опре-. деляется по формуле:
СО. :2Я , где Н -высота съемки;
я -угол отклонения олтичеокой оси фотока-меры от вертикали.
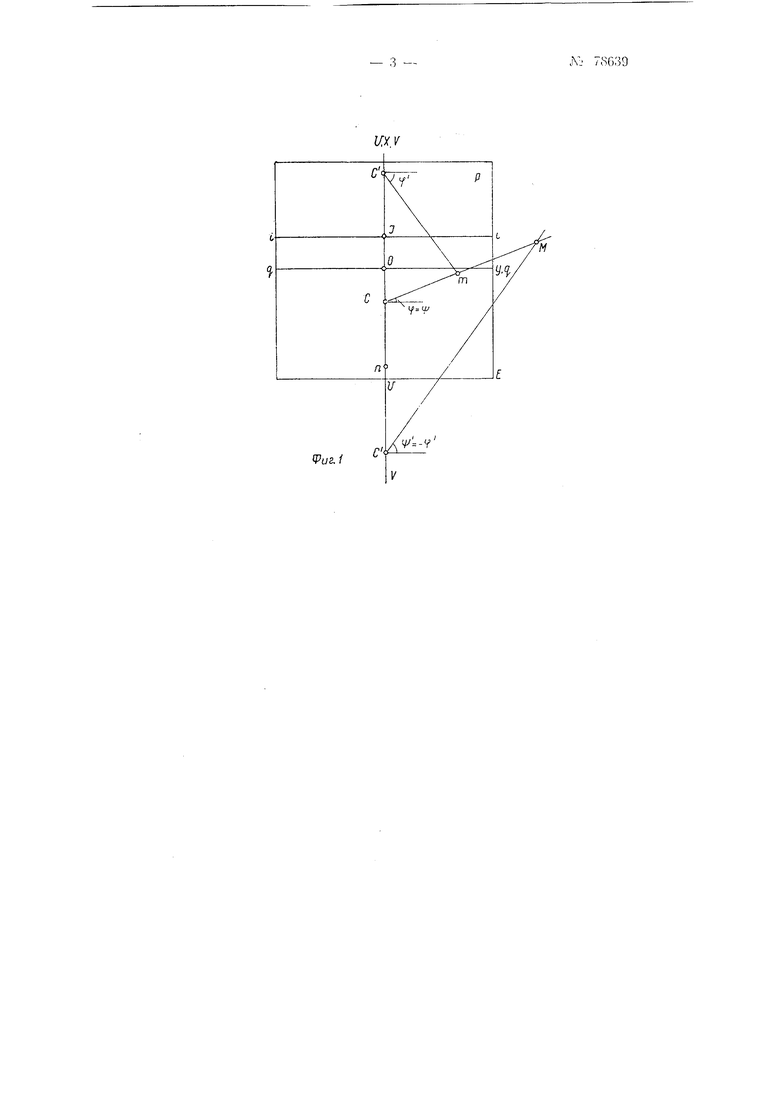
Для нахождения планового положения какой-либо точки М местности, отображенной в точке т анимка, поступают следующим образом.
Проводят нз точек нулевых искажений С и С направления на определяемую точку т (фиг. 1). Углы, составленные этими направлениями с горизонталью, обозначают через -р и cpi.
От точки С на линии направления съемки откладывают отрезок.
( - 9 И
и о - /,iiJ
где - -- :маощтаб отработки.
sn -J.
.№ 78639- 2 -
Определяемая точка должна лежать на направлении Ст. Чтобы найти ее, строем при точке С угол V -9. Пересечение полученного таким образом направления СС направлением Ст. представляет собой плановое положение точки /и.
Фототриангуляции из мнимой и действительиой точек нулевых искажений производят аналогичным способом.
Имерив тлы а и 9 или вычислив их по измеренным прямоугольным координатам точки т, расстояиие от точки С до точки М вычисляют по формуле:
С/1//:::: -СС -- ff-TTЭто расстояние и угол у вполне опреде.ляют положение точки М. . осуп1ествления фототриангуляции в пределах одного или нескольких маршрутов поступают с-тедующим образо1м.
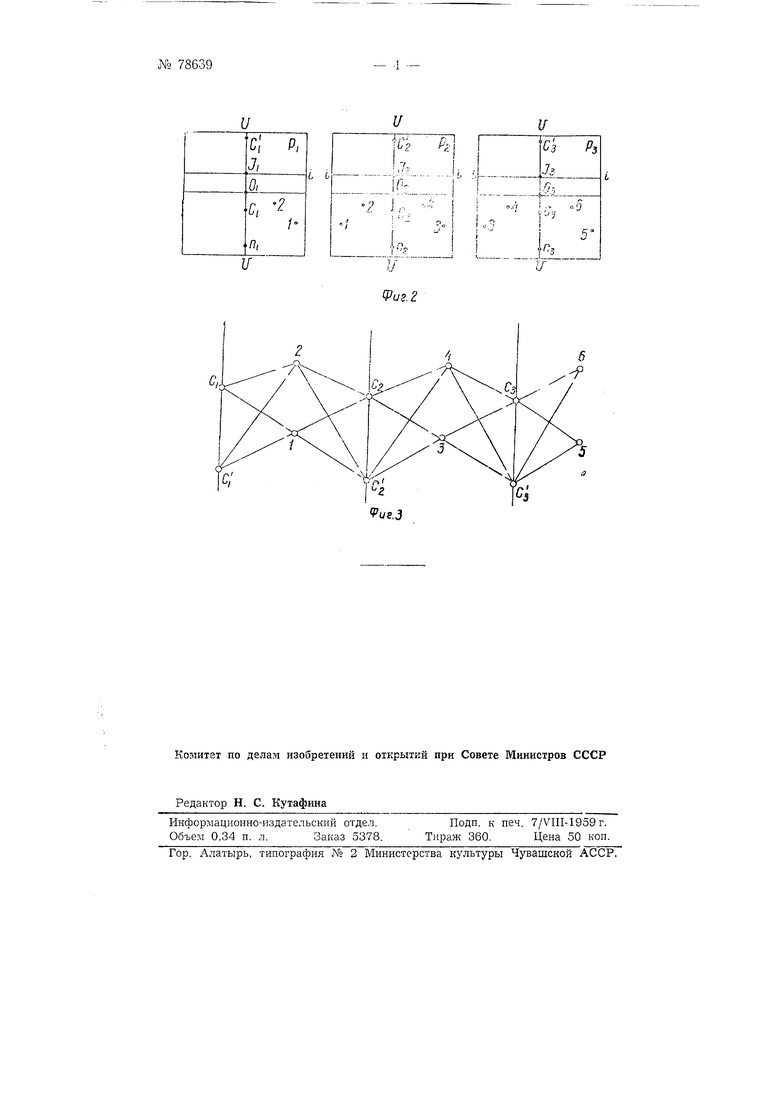
Дан маршрут взаимно перекрываюпдихся наклонных снимков PI, Р-2, PS, полученных одиночной камерой (фиг. 2).
На .снимках отмечены главные вертж али, линии действительного горизонта, мнимые точки нулевых искажений С , Сз, Сз.... и действительные точки нулевых иска1жений Ci, С, Сз....
Выбрав в зоиах взаимных перекрытий снимков точки 1, 2, 3, 4, 5, 6, най|де-л1 плановое положение этих точек путам фототриангуляпии из мнимых и действительных точек нулевых искажений.
Измерим на каждом снимке углы 9 и f, которые соста вляют горизонтали с направлениями из точек нулевых искажений на определяемые точки.
Принимая за базис произвольпый отрезок Ci, С, .соответствующий отрезку С , Cii на снимке Pi, найдем плановое положение точек / и 2. Затем по этим точкам и соответствующим углам, измеренным при точках Сз и С2, получим плановое положение точек С и Сз, которые будут исхо1 1ньоми для определения точек 5 и 4 по измеренным углам, определяющим направления Cs-4 Сз-3; Са-4 (фиг. 3).
Аналопично производят развитие сети по остальным снимка;.1. В результате получается фототриангуляпионный ряд в произвольном масштабе.
Предмет изобретения
Способ опре|Деления положений точек 1местности по аэроснимкам с применением фототриангуляции, отличающийся тем, что, с целью сокращения продольных перекрытий снимков путем исключения применения начальных направлений, в качестве верщин паправлений используют действительные и мнимые точки нулевых искажений.
sin(
| название | год | авторы | номер документа |
|---|---|---|---|
| Перспектограф | 1948 |
|
SU86828A1 |
| Способ пространственной фототриангуляции | 1958 |
|
SU121246A1 |
| Стереотрансформатор | 1948 |
|
SU83798A1 |
| Стереокомпаратор | 1959 |
|
SU122887A1 |
| СПОСОБ СОВЕРШЕНСТВОВАНИЯ ФОТОТРИАНГУЛЯЦИИ ПРИ СОЗДАНИИ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2023 |
|
RU2835990C2 |
| СПОСОБ СОЗДАНИЯ ОРТОФОТОПЛАНОВ ПО МАТЕРИАЛАМ АЭРОВИДЕОСЪЕМКИ | 2002 |
|
RU2235292C2 |
| Двойной проектор для обработке аэроснимков | 1948 |
|
SU78643A1 |
| Способ получения непрерывного стереоизображения земной поверхности с движущегося носителя | 2018 |
|
RU2686513C1 |
| СПОСОБ ПОЛУЧЕНИЯ НЕПРЕРЫВНОГО СТЕРЕОИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2024 |
|
RU2832645C1 |
| Способ фотограмметрического определения координат точек местности | 1980 |
|
SU964444A1 |
Фиа/
