1
Изобретение относится к магнитометрии, точнее - к методам компонентных измерений магнитного поля и предназначено для измерения компонент вектора магнитной и.ндукции геомагнитного поля.
Известен способ измерений компонент вектора магнитной индукции, включающий поочередную компенсацию измеряемых компонент U1
Недостатком этого способа является низкая точность измерения.
Известен также способ измерений компонент вектора магнитной индукции, включающий определение величины модуля вектора магнитной индукции, ориентацию преобразователя, помещенного в центре ортогональной колечной системы и определение суммарного магнитного поля колец и Земли
Недостатком известного способа является низкая точность измерений из-за необходимости последовательного (поочередного) измерения компонент.
Цель изобретения - повышение точности.
Указанная цель достигается тем, что в известном способе измерения компонент вектора магнитной индукции, включакяпем ориентацию преобразователя и определение величины модуля вектора магнитной индукции, измеряемое поле линейно преобразуют
5 по трем взаимно перпендикулярным направлениям с заданными коэффициентами преобразования, из которых хотя бы один по величине не равен двум другим, ориентируют преобра; оJO ватель до совмещения направления преобразованного поля с указанным коэффициентом преобразования с направлением измеряемой компоненты вектора магнитной индукции, а на«с правление с любым из оставшихся коэффициентов преобразования - с плоскостью, образованной первьлм направлением и направлением вектора магнитной индукции, определяют величину вектора магнитной индукции преобразованного поля с последующим определением компонент вектора магнитной индукции.
Кроме того, эта цель достигается
25 также тем, что в способе измерения компонент вектора магнитной индукции в плоскости перпендикулярной направлению с коэффициентом преобразования, отличагадимея от двух
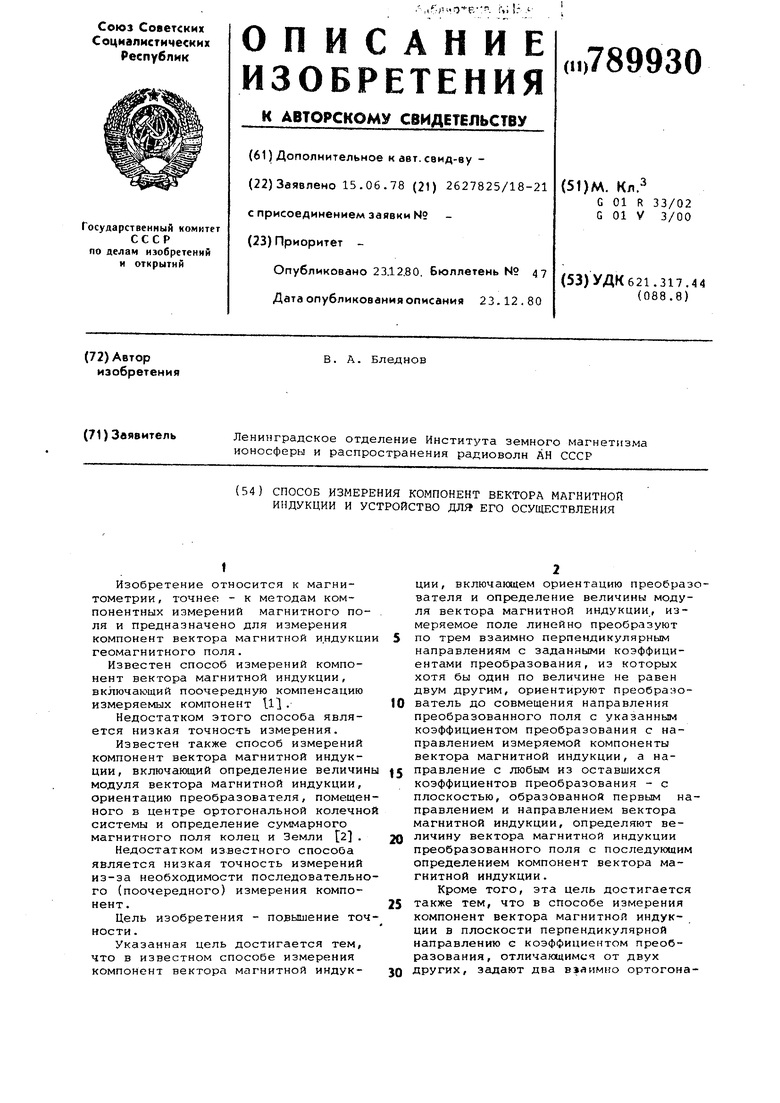
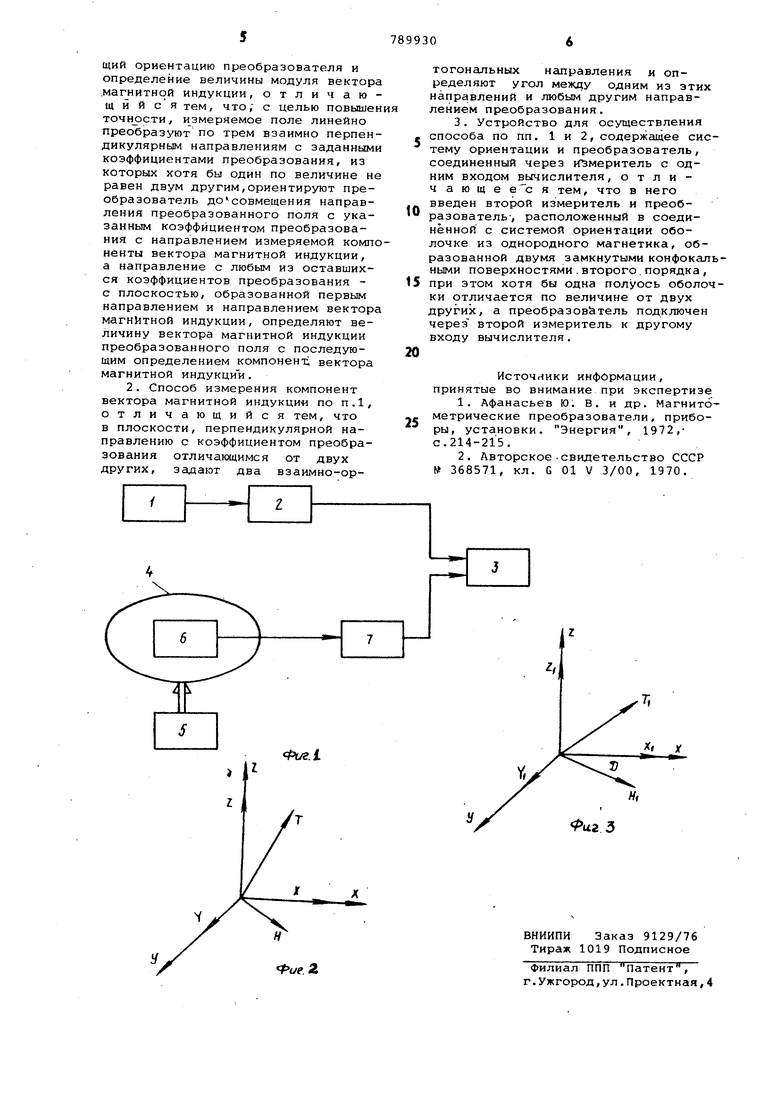
30 других, задают два взаимно ортогональных направления и определяют угол между одним из этих направлений и любым другим направлением преобразования. Для осуществления способа измере ния компонент вектора магнитной индукции в устройство, содержащее сис тему ориентации и преобразователь соединенный через измеритель с Одним входом вычислителя, введены второй измеритель и преобраэователь, расположенный в соединенной с системой ориентации оболочке из однородного магнетика, образованно двумя замкнутьоми конфокальными по-, верхностями второго порядка, при этом хотя бы одна полуось оболочки отличается по величине от двух дру гих, а преобразователь подключен через второй измеритель к другому входу вычислителя. На фиг.1 приведена структурная схема устройства, реализующего предлагаемый способ измерения компонент вектора магнитной индукции; на фиг.2 - вектор магнитной индукции (ВМИ) Т; на фиг.3 - результат преобразования ВМИ Т в ВМИ Т, . Устройство содержит преобразова тель 1 , соединенный через измеритель 2 с одним входом вычислителя 3. В замкнутую оболочку 4, соедине ную с системой ориентации 5, помещ второй преобразователь 6, который подключен через второй измеритель 7 к другому входу вычислителя 3. Компоненты ВМИ Т имеют значения X, У, Z, . ,; при этом Х .,У, 2Г, PJ.. + V где RX , Ry, Ri -коэффициенты преоб зования по соответствующим направл ниям (полуосям оболочки).
Измерение компонент ВМИ производят следующим образом.
Преобразователь 1-устанавливают в выбранной точке измерения. Преобразователь 6, помещённый в замкнутую оболочку 4, устанавливают в точку, поле в которой по величине и направлению совпадает с полем первой точки
Одну из полуосей оболочки 4, например, с коэффициентом преобразования Р 2 , с помощью системы ориентации 5 совмещают с заданным направлением. После этого оболочку 4 вращают вокруг этого направления до получения на измерителе 7 максимального (минимального) по величине значения поля внутри оболочки 4. Зная это значение и зная величину модуля
/(V-P/T)
Nl P/-P2,()
де X - величина компоненты ВМИ,
. направление которой составляет угол с D направлением второй полуоси;
У -. величина компоненты ВМИ,
направление которЬй перпенг дикулярно направлениям X и 2;
коэффициент преобразования вдоль третьей полуоси оболочки 4 .
Формула изобретения
1. Способ измерения компонент i5 вектора магнитной индукции, включайТ (фиг.З) определяют компоненМИ по формулам Z - величина компоненты ВМИ,совпадающая по направлению с направлением выбранной полуоси; величина компоненты ВМИ, лежащей в плоскости, перпендикулярной выбранному направлению; модуль ВМИ преобразованного поля; - модуль ВМИ внешнено поля; коэффициент преобразования вдоль выбранного направления;коэффициент преобразования вдоль направления полуоси, совпадающей с плоскостью,в которой находится выбранная полуось и ВМИ внешнего поля. алее, в плоскости, перпендикуой выбранному направлению, задва взаимно ортогональных наления . осле проведения всех действий, ходимых для определения двух онент ВМИ,- определяют угол междним из заданных направлений правлением полуоси с коэффицим преобразования Рх Ру , затем деляют величины компонент ЁМИ ормулам /T CP/cosb-P iH bK/ 2-U5 i cos D Я, sih Ь)- Т/-Р,Т PV-PZH§D
щий ориентацию преобразователя и определение величины модуля вектора .магнитной индукции, отличающийся тем, что; с целью повышен TO4HjpCTH, измеряемое поле линейно преобразуют по трем взаимно перпендикулярным направлениям с заданными коэффициентами преобразования, из которых хотя бы один по величине не равен двум другим,ориентируют преобразователь досовмещения направления преобразованного поля с указанным коэффициентом преобразования с направлением измеряемой компоненты вектора магнитной индукции, а направление с любым из оставшихся коэффициентов преобразования с плоскостью, образованной первым направлением и направлением вектора магнитной индукции, определяют величину вектора магнитной индукции преобразованного поля с последующим определением компонент; вектора магнитной индукции.
2. Способ измерения компонент вектора магнитной индукции по п.1, отличающийся тем, что в плоскости, перпендикулярной направлению с коэффициентом преобразования отличающимся от двух других, задают два взаимно-ортогональных направления и определяют угол между одним из этих направлений и любым другим направлением преобразования.
3. Устройство для осуществления способа по пп. 1 и 2, содержащее систему ориентации и преобразователь, соединенный через измеритель с одним входом в ычислителя, о т л и ч ающее с я тем, что в него введен второй измеритель и преобразователь, расположенный в соединённой с системой ориентации оболочке из однородного магнетика, образованной двумя замкнутыми конфокальными поверхностями,второго.порядка, 5 при этом хотя бы одна полуось оболочки отличается по величине от двух других, а преобразователь подключен через второй измеритель к другому входу вычислителя.
20
Источники информации, принятые во внимание при экспертизе
1.Афанасьев ю. В. и др. Магнитометрические преобразователи, приборы, установки. Энергия, 1972,0.214-215.
2.Авторское.свидетельство СССР № 368571, кл. G 01 V 3/00, 1970.
U2 3