Изобретение относится к магнитометрии, а именно, к методам компонентных измерений геомагнитного поля вблизи ферромагнитных масс, например с борта объектов, имеющих собственное магнитное поле, и предназначено для определения угловых компонент геомагнитного поля.
Известен способ определения направления вектора магнитной индукции (ВМИ), при котором определяют поправки на девиацию и затем используют их для коррекции результатов измерений компонент ВМИ геомагнитного поля на объекте (носителе), имеющем собственное магнитное поле. Однако использование таких методов возможно только при относительно небольшом (порядка 100-200 нТ) уровне собственного магнитного поля носителя (СПН).
Известен также способ определения направления вектора магнитной индукции геомагнитного поля, включающий формирование дополнительных магнитных полей, каждое из которых равно по величине и противоположно по направлению проекции составляющих СПИ на направление ВМИ геомагнитного поля.
При этом способе также определяют параметры суммарного магнитного поля (СМП) при фиксированных положениях носителя.
Однако для осуществления данного способа носитель должен двигаться определенными магнитными курсами и совершать только определенные виды крена, причем отклонение от заданных эволюций вносит погрешности в определение составляющих СПН. Кроме того, эволюции должны совершаться в районе, где известны величина модуля ВМИ геомагнитного поля и его наклонение, что не всегда возможно.
С целью повышения точности при определении направления вектора магнитной индукции геомагнитного поля способом, включающим определение параметров суммарного магнитного поля при фиксированных положениях носителя и формирование дополнительных магнитных полей, формируют два взаимно ортогональных дополнительных магнитных поля, каждое из которых равно по величине соответствующей составляющей суммарного магнитного поля и противоположно ей по направлению, определяют величину составляющей суммарного магнитного поля, ортогональной направлениям дополнительных магнитных полей, одновременно определяют магнитный курс, а также углы продольного и поперечного кренов носителя.
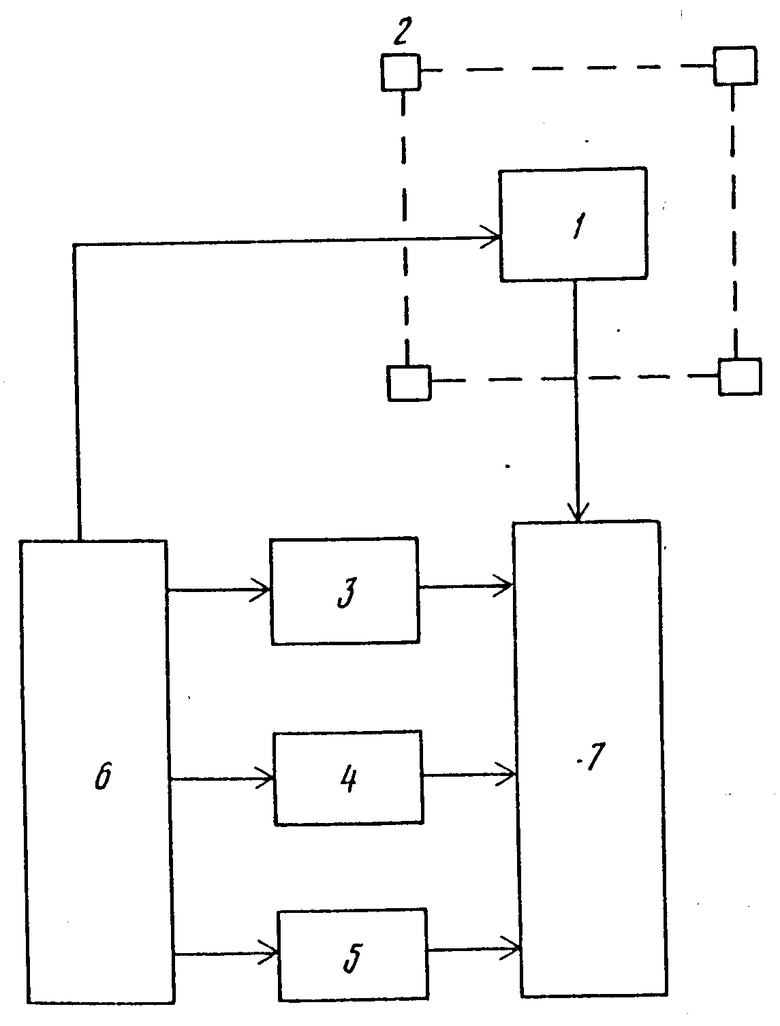
На чертеже приведена блок-схема устройства, реализующего способ.
Модульный преобразователь 1 расположен в системе 2 компенсации составляющих СМП. Он имеет также измеритель 3 углов поперечного крена, измеритель 4 углов продольного крена, измеритель 5 магнитного курса носителя. Работу модульного преобразователя 1 и измерителей 3-5, координирует синхронизатор 6. Выходы модульного преобразователя 1 и измерителей 3-5 подключены к вычислителю 7.
Способ реализуется следующим образом.
С помощью системы 2 компенсации компенсируют две любые компоненты суммарного магнитного поля в выбранной системе координат. Для примера выберем систему координат, жестко связанную с носителем. Модульный преобразователь 1 определяет компоненту суммарного магнитного поля, ортогональную направлениям магнитных полей системы 2. Одновременно с измерением этого поля (одновременность измерений достигается с помощью синхронизатора 6) определяют угол продольного крена, угол поперечного крена и магнитный курс носителя. Эти углы определяют с помощью измерителей углов 4, 3, 5 соответственно. Величина определенной компоненты магнитного поля и соответствующие ей значения углов запоминаются в вычислителе 7. После определенного количества измерений вычислитель решает систему уравнений. В результате ее решения определяют истинный магнитный курс носителя и магнитное наклонение. По истинному магнитному курсу определяется направление геомагнитного меридиана. По полученным данным судят о направлении ВМИ геомагнитного поля.
Полная компенсация составляющих СПН позволяет системам стабилизации работать в разгруженном режиме, что повышает точность измерений и снижает габариты. Кроме того, используется изменение ориентации носителя, присущее любому объекту (судну, самолету). При этом отсутствует необходимость движения носителя определенными магнитными курсами.
СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ВЕКТОРА МАГНИТНОЙ ИНДУКЦИИ ГЕОМАГНИТНОГО ПОЛЯ БЛЕДНОВА.
Способ определения направления вектора магнитной индукции геомагнитного поля, включающий определение параметров суммарного магнитного поля при фиксированных положениях носителя и формирование дополнительных магнитных полей, отличающийся тем, что, с целью повышения точности, формируют два взаимно ортогональных дополнительных магнитных поля, каждое из которых равно по величине соответствующей составляющей суммарного магнитного поля и противоположно ей по направлению, определяют величину составляющей суммарного магнитного поля, ортогональной направлениям дополнительных магнитных полей, одновременно определяют магнитный курс, а также величину углов продольного и поперечного кренов носителя.
| Лысенко А.П | |||
| "Теория и методы компенсации магнитных помех", "Геофизическое приборостроение", вып.7, 1960, с.44-58. |
