рости ленты конвейера, подключен ко входу вторичного интегрирующего прибора 9.
Весы работают следующим образом.
В установившемся режиме измеряемая весовая нагрузка уравновешивается силой реакции динамометра 1. Роликоопора 2 находится в заданном положении, при котором исключается погрешность от прогиба ленты. При изменении нагрузки F роликоопора 2 стремится сместиться с первоначального положения. В результате при пассивной реакции преобразователя 3 происходит изменение уравновешивающего усилия динамометра 1, содержащее составляющую, обусловленную изменением положения роликоопоры 2. Одновременно перемещение роликоопоры 2 воспринимается датчиком 6, посылающим сигнал на авторегулятор 5, который формирует управляющий сигнал и с помощью исполнительного механизма 4 оказывает регулирующее воздействие на преобразователь 3 таким образом, чтобы сила реакции динамометра 1 уравновесила изменившуюся нагрузку F при нейтральном положении роликоопоры 2. При этом датчик 7 выдает измерительный сигнал, соо.тветствующий нагрузке F, на вторичный интегрирующий прибор 9. Небольщая величина отклонений перемещения роликоопоры 2 в переходных режимах процесса авторегулирования является условием обеспечения высокой точности интегрирования измеряемой нагрузки, поскольку в этом диапазоне перемещеиий измерительная система линейна. При отключении авторегулятора 5 исполнительный механизм 4 стопорится, а динамометр 1 продолжает воспринимать действие . нагрузки, обеспечивая работу весов в режиме индикации, т. е. в этом случае весы работают в режиме известных весов, не имеющих устройства стабилизации положения подвижной роликоопоры.
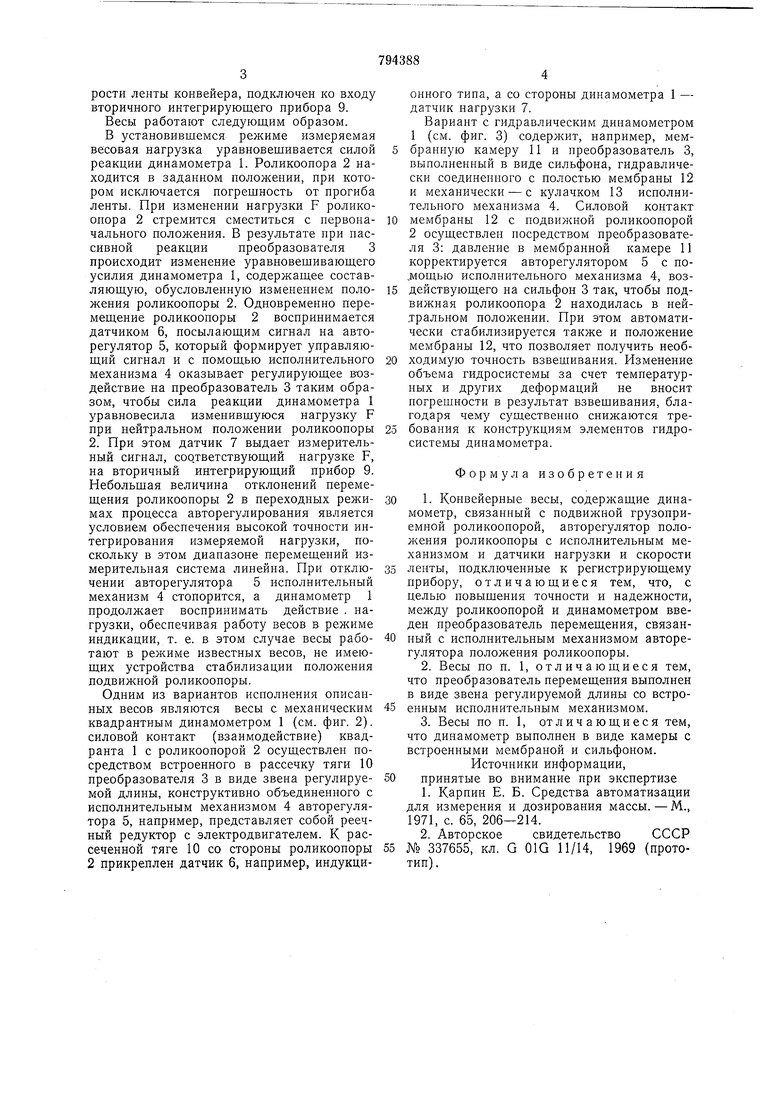
Одним из вариантов исполнения описанных весов являются весы с механическим квадрантным динамометром 1 (см. фиг. 2). силовой контакт (взаимодействие) квадранта 1 с роликоопорой 2 осуществлен посредством встроенного в рассечку тяги 10 преобразователя 3 в виде звена регулируемой длины, конструктивно объединенного с исполнительным механизмом 4 авторегулятора 5, например, представляет собой реечный редуктор с электродвигателем. К рассеченной тяге 10 со стороны роликоопоры 2 прикреплен датчик б, например, индукционного типа, а со стороны динамометра 1 - датчик нагрузки 7.
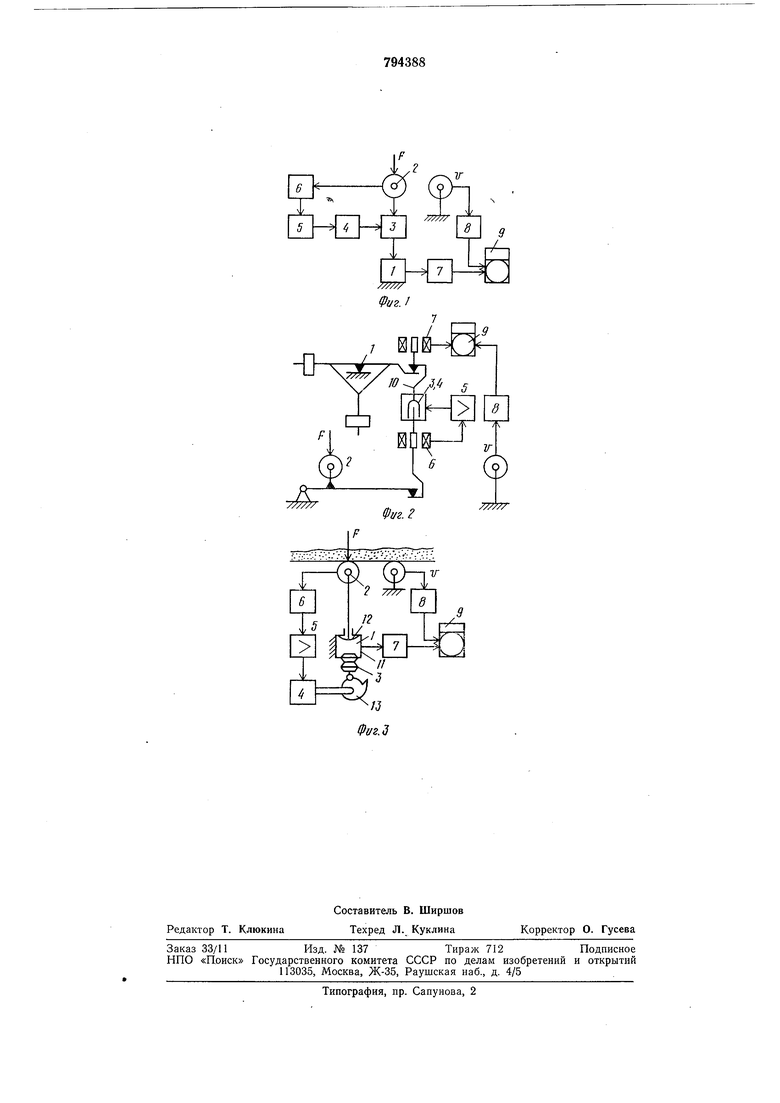
Вариант с гидравлическим динамометром
1(см. фиг. 3) содержит, например, мембранную камеру 11 и преобразователь 3, выполненный в виде сильфона, гидравлически соединенного с полостью мембраны 12 и механически - с кулачком 13 исполнительного механизма 4. Силовой контакт мембраны 12 с подвижной роликоопорой
2осуществлен посредством преобразователя 3: давление в мембраиной камере И корректируется авторегулятором 5 с по,мощью исполнительного механизма 4, воздействующего на сильфон 3 так, чтобы подвижная роликоопора 2 находилась в нейтральном положении. При этом автоматически стабилизируется также и положение мембраны 12, что позволяет получить необходимую точность взвешивания. Изменение объема гидросистемы за счет температурных и других деформаций не вносит погрешности в результат взвешивания, благодаря чему существенно снижаются требования к конструкциям элементов гидросистемы динамометра.
Формула изобретения
1.Конвейерные весы, содержащие динамометр, связанный с подвижной грузоприемной роликоопорой, авторегулятор положения роликоопоры с исполнительным механизмом и датчики нагрузки и скорости ленты, подключеииые к регистрирующему прибору, отличающиеся тем, что, с целью повышения точности и надежности, между роликоопорой и динамометром введен преобразователь перемещения, связанный с исполнительным механизмом авторегулятора положения роликоопоры.
2.Весы по п. 1, отличающиеся тем, что преобразователь перемещения выполнен в виде звена регулируемой длины со встроенным исполнительным механизмом.
3.Весы по п. 1, отличающиеся тем, что динамометр выполнен в виде камеры с встроенными мембраной и сильфоном.
Источники информации, принятые во внимание при экспертизе
1.Карпин Е. Б. Средства автоматизации для измерения и дозирования массы.-М., 1971, с. 65, 206-214.
2.Авторское свидетельство СССР № 337655, кл. G 01G 11/14, 1969 (прототип).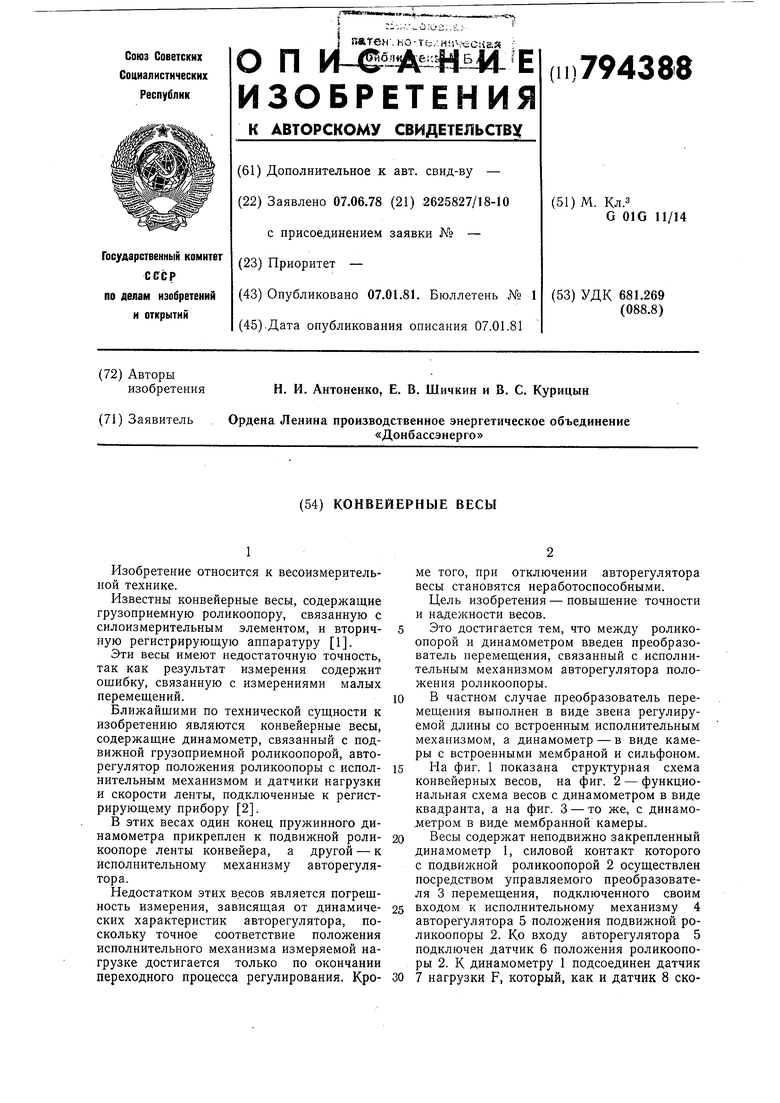
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНВЕЙЕРНЫЕ ВЕСЫ | 1972 |
|
SU337655A1 |
| Автоматический регулятор усилия подачи бурового снаряда | 1982 |
|
SU1044773A1 |
| Устройство для сварки труб из термопластов | 1988 |
|
SU1666342A1 |
| КОНВЕЙЕРНЫЕ ВЕСЫ | 2001 |
|
RU2193759C1 |
| Автоматические конвейерные весы | 1960 |
|
SU149592A1 |
| Следящее грузоприемное устройство автоматических конвейерных весов | 1974 |
|
SU495550A1 |
| Конвейерные весы | 2018 |
|
RU2733977C2 |
| Устройство для взвешивания жидкого металла в ковше | 1990 |
|
SU1722684A1 |
| ВЕСЫ | 1996 |
|
RU2108552C1 |
| КОНВЕЙЕРНЫЕ ВЕСЫ | 2005 |
|
RU2289797C1 |
-&
.JsppE
дгСЬ
Фиг. г
