Изобретение относится к весоизмерительной технике, а именно к устройствам для взвешивания сыпучих материалов на ленточных конвейерах.
Известны двухроликовые конвейерные весы (заявка Польши 254487, кл. G 01 G, 1987), состоящие из двух коромысел (платформ), подвешенных шарнирно встречно друг другу, наружные плечи которых снабжены роликоопорами, а внутренние, соединенные через тягу, воздействуют на один датчик веса.
Недостатком весов являются:
1) снижение чувствительности и, следовательно, точности взвешивания при малых погонных нагрузках из-за отсутствия механического уравновешивания мертвого веса (тары);
2) снижение точности при "сходе" ленты (смещение относительно оси конвейера), т. к. при желобчатой ленте и одном датчике веса на него начинают действовать неуравновешенные поперечные силы;
3) низкая точность их градуировки и поверки статической нагрузкой, т.к. не предусматривается возможность калибровки точек приложения ее к платформам, особенно на наклонных конвейерах, когда имеет место неоднозначное изменение плеч приложения нагрузки от ленты к роликам относительно шарниров подвески встречных платформ. Введение расчетных поправок в этом случае невозможно, т.к. неизбежно имеет место неподдающийся оценке разброс параметров пространственных конструкций платформ, определяемый технологическими допусками при изготовлении и монтаже непосредственно на конвейерах, а также желобчатой формой ленты. Погрешности градуировки по этой причине могут превышать относительную погрешность, регламентированную классом точности весов;
4) при одном датчике веса не может быть реализован способ поверки весов статической нагрузкой (спецгрузами) без остановки технологического процесса, т.е. при работе конвейера под нагрузкой.
Известны автоматические конвейерные весы с цифровым управлением (а.с. СССР 1359681, кл. G 01 G, 1987 г.), содержащие две встречные весовые платформы с роликоопорами, закрепленные на раме конвейера с помощью шарниров и опирающиеся на один общий датчик веса, эталонный груз, электромагнит для его поднятия, закрепленные на второй весовой платформе, каждая весовая платформа снабжена механизмом ее подъема.
Недостатками весов являются:
1) снижение чувствительности и, следовательно, точности при малых погонных нагрузках ленты из-за отсутствия механического уравновешивания "тары";
2) снижение точности при "сходе" ленты;
3) низкая точность взвешивания, т.к., во-первых, при воздействии эталонным грузом (статической нагрузкой) только на вторую платформу не учитывается отличие ее коэффициента преобразования от коэффициента преобразования первой платформы. Несоответствие коэффициентов преобразования определяется неизбежным технологическим разбросом параметров конструкций платформ, асимметричной деформацией ленты в пролетах между роликоопорами на наклонных конвейерах, обратными знаками моментных нагрузок на встречные платформы от действия продольных сил (сопротивление движению ленты, удары кускового материала). Во-вторых, при поочередном поднятии (отрыве от датчика веса) одной платформы давление ленты на вторую платформу не будет соответствовать давлению полезной нагрузки. Возникающая дополнительная погрешность будет определяться величиной переподъема и натяжением ленты.
Задачей изобретения является разработка конструкции весов, обеспечивающих повышение точности взвешивания и возможность применения косвенного способа градуировки и поверки статической нагрузкой.
Это достигается тем, что в конвейерных весах, содержащих две шарнирно закрепленные весовые двуплечие платформы с желобчатыми весовыми роликоопорами, установленные встречно по расположению весовых роликов относительно шарниров и опирающиеся на датчики веса, эталонный груз и механизм его перемещения, платформы расположены по разные стороны одной стационарной роликоопоры, наружное плечо каждой платформы снабжено двумя контргрузами с возможностью перемещения вдоль плеча платформы и опирается на один датчик веса, внутреннее плечо каждой платформы снабжено призмой для подвески образцовых грузов, причем точки опоры на датчики веса и установки призм расположены на одной продольной стороне каждой платформы, при этом датчики веса и призмы платформ расположены по разные стороны конвейера.
Эталонный груз выполнен в форме металлической балки длиной l<L<2l, где l - расстояние между соседними роликоопорами.
Масса образцового груза
где δИ - допускаемая погрешность поверки;
G - номинальная нагрузка от материала на весовом участке ленты;
l - длина весового участка ленты;
с - жесткость датчика веса;
σ - натяжение ленты в месте установки весов.
Расположение контргрузов и датчиков веса исключает перекос платформ, имеющих конечную поперечную жесткость, при уравновешивании "тары", подвеске к ним образцовых грузов и дополнительную погрешность, возникающую при "сходе" ленты.
Расположение платформ, размеры эталонного и образцовых грузов дают возможность применять косвенный способ градуировки и поверки.
На фиг. 1 изображена схема конвейерных весов на наклонном конвейере, на фиг.2 - вид А на фиг.1.
Весы содержат две встречные (по расположению весовых роликов относительно шарниров) весовые двуплечие платформы - нижнюю 1 и верхнюю 2, подвешенные к шарнирным опорам 3, 4. Наружное плечо каждой платформы снабжено двумя контргрузами 5, 6 с возможностью перемещения вдоль плеча и концом опирается на датчики веса 7, 8.
Внутренние плечи платформ снабжены весовыми роликоопорами 9, 10, по которым перемещается лента 11, и призмами 12, 13 для поочередной подвески образцовых грузов 14 при градуировке и поверке весов.
Датчики веса 7, 8 и призмы 12, 13 при встречном монтаже платформ расположены по разные стороны конвейера.
Для исключения взаимного влияния при поочередной догрузке платформ образцовыми грузами платформы расположены по разные стороны стационарной роликоопоры 15.
Весы монтируются на раме конвейера вместо 2-х штатных роликоопор, которые устанавливаются на встречных платформах в качестве весовых опор 9, 10.
В весах реализуется двухканальный принцип измерения, обеспечивающий инвариантность к действию возмущений - ряда механических факторов (сопротивления движению ленты, асимметрия ее деформации на наклонных конвейерах, динамические нагрузки и др.).
Нагрузка q ленты передается на датчики веса 7, 8. При этом информативный сигнал, соответствующий полезной измеряемой нагрузке q(t), поступает на них синфазно, а неинформативный сигнал, соответствующий возмущениям f(t), благодаря встречному расположению платформ, поступает дифференциально. Суммирование сумматором 21 выходных сигналов датчиков 7, 8 после перемножения на сигнал от преобразователя скорости 22, усиления и интегрирования сумматорами отдельных каналов 23 и 24 обеспечивает компенсацию неинформативных сигналов - возмущений f(t), влияющих на точность, и интегрирование во времени только измеряемой производительности Q = ∫qVdt.
Градуировка и поверка весов заключается в следующем.
При поднятой ленте 11 передача единицы массы ленты и сыпучего материала 18 на опоры имитируется эталонным грузом-балкой 16 массой mБ=2 ql, где q - линейная плотность материала, l - длина пролета ленты (расстояние между опорами). Механизмом 17 балка опускается на средние ролики по осевой линии конвейера и последовательно фиксируется в четырех положениях: загружены стационарный ролик 19 и весовой 9, весовой 9 и стационарный 15 первой (нижней) платформы; стационарный ролик 15 и весовой 10, весовой 10 и стационарный 20 второй (верхней) платформы.
В каждом из 4-х положений балки снимают показания датчиков веса соответствующих платформ. Эффективное значение реакции каждой платформы определяют как среднее 2-х показаний при нагружении балкой ее весового ролика со смежными стационарными роликами. Получают средние показания МН для нижней и МВ для верхней платформ.
На наклонном конвейере из-за технологического разброса параметров конструкций платформ и роликоопор, угла наклона конвейера, отклонений от общей продольной оси ОО осей шарниров платформ и уровней действия эквивалентных сил сопротивления движению ленты, зависящих на желобчатых роликоопорах от текущего значения погонной нагрузки на ленте, имеет место неравенство плеч l
Так как в период эксплуатации весов их поверка при работающем конвейере не может осуществляться загрузкой весовых роликов эталонным грузом-балкой, то производится имитация материала образцовыми грузами 14 путем подвешивания их на призмы 12, 13. В этом случае при передаче единицы массы датчикам веса из-за того, что l
Калибровка точек подвески образцовых грузов выполняется в следующей последовательности. Эталонный груз-балка снимается с роликов, образцовый груз массой mК=mБ/2, где mБ - масса балки, подвешивается последовательно на призмы обеих платформ. При этом снимаются показания по каждому каналу МК Н и МК В.
Определяются коэффициенты калибровки:
КН=МК Н/МН и КВ=МК В/МВ,
где МН и МВ - показания при передаче весам единицы массы имитатором-балкой.
После калибровки точек подвески образцовых грузов лента опускается на ролики, конвейер включается, ленту загружают материалом с линейной плотностью, меньшей чем в рабочем режиме на величину РГР/1. За время взвешивания массы материала Q, соответствующей НмПВ (наименьшему пределу взвешивания по ГОСТ 8.005, ГОСТ 30124), снимают показания сумматоров обоих каналов Q1 и Q2. При работе конвейера с той же производительностью догружают платформу первого (верхнего) канала образцовым грузом РГР, снимают показания первого канала Q12 при достижении показаний второго (нижнего) канала значения Q2, т.е. при пропускании через весы той же массы материала Q.
Определяют цену отсчета сумматора первого канала: m/отсч.(кг/отсч.),
m/отсч.(кг/отсч.),
где QИ В= kВPГРVt1/l, т(кг) - масса материала, сымитированная образцовым грузом;
t1 - время получения показания Q12.
Догружают платформу второго (нижнего) канала образцовым грузом РГР, аналогично предыдущей операции снимают показания второго канала Q22 при достижении показаний первого канала значения Q1 и определяют m/отсч.(кг/отсч.),
m/отсч.(кг/отсч.),
где QИ Н=kHPГРVt2/l - масса материала, сымитированная образцовым грузом;
t2 - время получения показания Q22.
Цена отсчета сумматора 21 весов m/отсч.(кг/отсч).
m/отсч.(кг/отсч).
При периодической поверке весов выполняют описанные операции по определению значения dВЕС, которое сравнивается с полученным значением d*BEC при градуировке.
При градуировке и поверке весов поочередной догрузкой платформ образцовыми грузами практически воспроизводятся транспортируемым материалом все возмущения, характерные для рабочего режима конвейера. Для минимизации возможной методической погрешности градуировки и поверки, обусловленной неоднозначностью воздействия груза РГР, составляющего часть номинальной нагрузки на весы, при его приложении непосредственно к платформе весов и воздействия такого же приращения массы материала на ленте конвейера, масса РГР определяется из следующих условий.
Реакция весов при догрузке непосредственно платформы весов грузом РГР, составляющим часть номинальной нагрузки G,
где G - номинальная нагрузка от материала на весовом участке ленты, Н;
с - жесткость датчика веса, Н/м;
σ - натяжение ленты в месте установки весов, Н;
l - длина весового участка, м.
Реакция весов при номинальном значении нагрузки на ленте конвейера, равном G,
Относительная погрешность весов при градуировке грузом РГР
Отсюда, задаваясь допустимым значением δИ, определяют значение массы груза
Предлагаемые конвейерные весы обеспечивают повышение точности за счет:
- компенсации погрешности при "сходе" ленты и неравномерной ее загрузке по ширине;
- повышения чувствительности при механическом уравновешивании тары;
- высокой точности имитации реального сыпучего материала при градуировке и поверке статической нагрузкой в виде эталонных и образцовых грузов с предварительной калибровкой точек их приложения к весовым платформам.
Кроме того, обеспечиваются:
- расширение области и повышение эффективности применения за счет осуществления косвенного способа градуировки и поверки при работе конвейера под нагрузкой, альтернативного способу по ГОСТ 8.005, практически не реализуемому в реальных производственных условиях;
- 100% резервирования при выходе из строя одного из 2-х каналов;
- снижение стоимости за счет использования в качестве весов демонтируемых штатных роликоопор.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГРАДУИРОВКИ И ПОВЕРКИ КОНВЕЙЕРНЫХ ВЕСОВ | 2005 |
|
RU2289798C1 |
| КОНВЕЙЕРНЫЕ ВЕСЫ | 2005 |
|
RU2289797C1 |
| Конвейерные весы конвейеров прямого и реверсивного хода | 2016 |
|
RU2625042C1 |
| Способ градуировки и поверки конвейерных весов | 1989 |
|
SU1758443A1 |
| ВЗВЕШИВАЮЩАЯ СЕКЦИЯ ДЛЯ КОНВЕЙЕРОВ С ХОДОВЫМИ РОЛИКАМИ | 2005 |
|
RU2293292C1 |
| Способ градуировки и поверки конвейерных весов | 1990 |
|
SU1824523A2 |
| СПОСОБ НЕПРЕРЫВНОГО ИЗМЕРЕНИЯ ВЕСА ПЕРЕМЕЩАЕМЫХ МАТЕРИАЛОВ НА ЛЕНТОЧНЫХ КОНВЕЙЕРАХ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И ВЕСОВАЯ РОЛИКООПОРА ЛЕНТОЧНОГО КОНВЕЙЕРА | 2009 |
|
RU2401994C1 |
| КОНВЕЙЕРНЫЕ ВЕСЫ | 2002 |
|
RU2232979C2 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ КАЛИБРОВКИ КОНВЕЙЕРНЫХ ВЕСОВ | 2004 |
|
RU2361182C2 |
| УСТРОЙСТВО ДЛЯ ГРАДУИРОВКИ И ПОВЕРКИ КОНВЕЙЕРНЫХ ВЕСОВ | 2004 |
|
RU2284483C2 |

Изобретение относится к весоизмерительной технике, а именно к устройствам для взвешивания сыпучих материалов на ленточных конвейерах. Весы содержат две шарнирно закрепленные весовые двуплечие платформы 1, 2 с желобчатыми весовыми роликоопорами 9, 10, опирающиеся на датчики веса 7, 8, эталонный груз 16 и механизм 17 его перемещения. Платформы 1, 2 для исключения их взаимного влияния при градуировке и поверке расположены по разные стороны одной стационарной роликоопоры 15. Наружное плечо каждой платформы снабжено двумя контргрузами 5, 6 с возможностью их перемещения вдоль плеча платформы и опирается на один датчик веса. Внутреннее плечо каждой платформы снабжено призмой 12, 13 для подвески образцовых грузов. Датчики веса 7, 8 и призмы 12, 13 платформ расположены по разные стороны конвейера. Технический результат: повышение точности конвейерных весов и возможность градуировки и поверки без остановки технологического процесса. 2 з.п.ф-лы, 2 ил.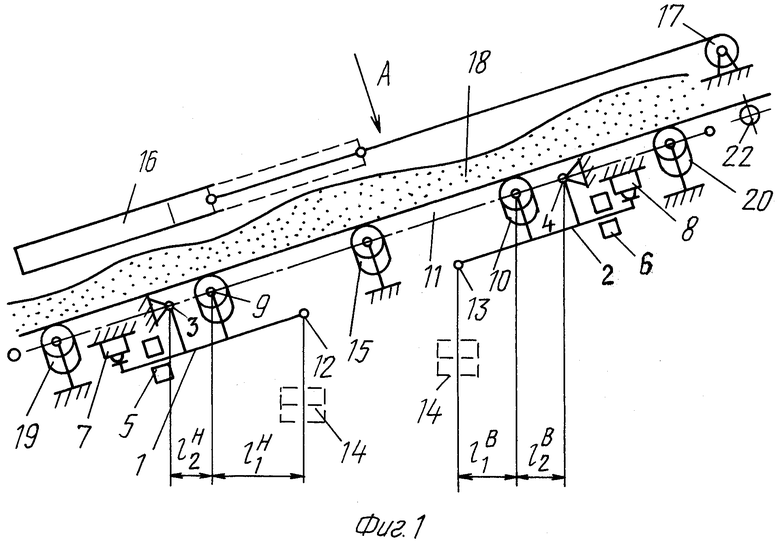

где δИ - допускаемая погрешность проверки;
G - номинальная нагрузка от материала на весовом участке ленты;
l - длина весового участка ленты;
с - жесткость датчика веса;
σ - натяжение ленты в месте установки весов.
| КОНВЕЙЕРНЫЕ ВЕСЫ | 0 |
|
SU320726A1 |
| Конвейерные весы | 1980 |
|
SU901836A1 |
| SU 720316 А1, 05.03.1980 | |||
| GB 1536558 А, 20.12.1978. | |||

