Предлагаемое изобретение относится к технике непрерывного взвешивания сыпучих материалов и может быть использовано в строительстве и в производстве строительных материалов.
В настоящее время весы, аналогичные предлагаемым, известны. К ним относятся, в частности, конвейерные весы, защищенные авторским свидетельством СССР №802805 от 02.11.1978. Они содержат весовые роликоопоры, объединенные в пары, связанные механическими системами передачи усилий, силоизмерительные датчики которых расположены по разные стороны продольной оси конвейера. Однако такие весы обладают недостаточной точностью и надежностью. Более точными и надежными являются весы-аналог, содержащие два грузоприемных устройства, включенных встречно друг другу, установленных на раме и имеющих в своем составе два датчика веса и контргрузы (Проспект фирмы ЗАО «Энергопред-Гидравлик»,М.,2001г.). Но указанные конвейерные весы имеют сложную конструкцию, а потому тоже недостаточно надежны.
Вместе с тем существуют конвейерные весы, защищенные патентом РФ на изобретение №2232979 от 23.09.2002, более простой конструкции и обладающие более высокой надежностью. Они наиболее близки к предлагаемым по технической сущности, а потому приняты нами в качестве прототипа.
Насколько можно судить по их описанию, конвейерные весы-прототип содержат датчик скорости, взаимодействующий с нижней ветвью конвейерной ленты, датчик веса, блок обработки информации, соединенный с выходами датчиков, две весовые роликоопоры, установленные на раме конвейера, и суммирующий механизм в виде двух рычагов равной длины, одними концами прикрепленных к роликоопорам, а другими - к соединительному элементу, выполненному с двумя шарнирами, имеющему подвижность в горизонтальной плоскости, передающему усилие рычагу масштабирования, связанному со входом датчика веса.
Конструкция весов-прототипа обеспечивает их высокую точность и приемлемую надежность при длительном сроке эксплуатации, что позволяет значительно расширить диапазон их применения. Она обладает меньшей металлоемкостью и создает удобство весов при их использовании. Тем не менее, являясь более надежными, чем аналоги, весы-прототип все же менее надежны, чем это требуется при их применении в составе автоматизированных производств. В связи с этим возникает проблема дальнейшего повышения надежности конвейерных весов, чего можно достичь дальнейшим упрощением их конструкции.
Технически разрешение этой проблемы обеспечивается за счет того, что конвейерные весы, содержащие датчик скорости, взаимодействующий с нижней ветвью конвейерной ленты, датчик веса, блок обработки информации, соединенный с выходами датчиков, весовую роликоопору, установленную на раме конвейера, и суммирующий механизм в виде двух рычагов равной длины, одним концом прикрепленных к роликоопоре, а другим концом - к соединительному элементу, выполненному с двумя шарнирами, имеющему подвижность в горизонтальной плоскости, передающему усилие рычагу масштабирования, связанному со входом датчика веса, отличаются от прототипа тем, что блок обработки информации включает в себя аналого-цифровой преобразователь, вход которого через усилитель с регулируемым коэффициентом усиления и аналоговый ключ связан с выходом датчика веса, накапливающий сумматор, входы которого соединены с выходами аналого-цифрового преобразователя, а выходы - через ключевую систему связаны с индикаторным табло, двоичный счетчик импульсов, работающий на вычитание, задающие входы которого соединены с программатором, а выходы - со входами логического элемента ИЛИ , двувходовый логический элемент И, первый вход которого соединен с выходом датчика скорости и параллельно через блок задержки - со счетным входом счетчика импульсов, выход элемента ИЛИ соединен со вторым входом элемента И и параллельно через инвертор - с управляющим входом ключевой схемы, выход элемента И соединен с управляющим входом аналогового ключа, датчик веса выполнен в виде нелинейного потенциометра, датчик скорости - в виде датчика импульсов, а весовая роликоопора выполнена в виде ролика, состоящего из двух дисков со ступицами, установленных на общей оси с возможностью встречного винтового перемещения, корпуса, образованного гибкими элементами, соединяющими диски по периферии, и распорной пружины, размещенной между ними, при этом в ступицах дисков выполнены кольцевые проточки, а рычаги суммирующего механизма прикреплены к роликоопоре с помощью вилок, размещенных в проточках.
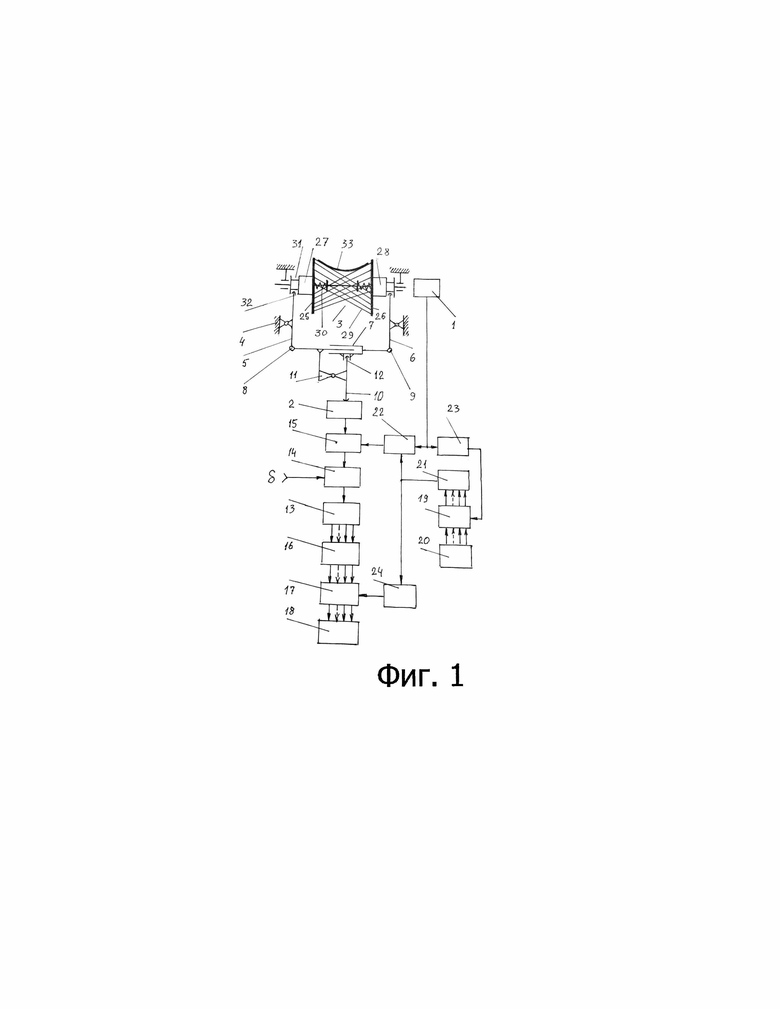
Схема предлагаемых конвейерных весов показана на фиг.1.
Весы содержат датчик скорости 1, выполненный в виде датчика импульсов (инкрементного датчика или относительного энкодера), взаимодействующего с нижней ветвью конвейерной ленты ( на фиг. она не показана) и включает в себя датчик веса 2, блок обработки информации, соединенный с выходами датчиков, весовую роликоопору 3, установленную на раме 4 конвейера, и суммирующий механизм в виде двух рычагов 5 и 6 равной длины, одним концом прикрепленных к роликоопоре 3, а другим концом - к соединительному элементу 7, выполненному с двумя шарнирами 8 и 9 имеющему подвижность в горизонтальной плоскости, передающему усилие рычагу масштабирования 10, связанному со входом датчика веса 2 (соединительный элемент представляет собой двухзвенный телескопический стержень, первое звено которого связано с рычагом 5, а второе звено - с рычагом 6. При этом рычаг масштабирования 10 имеет опору 11, связанную с первым звеном стержня, а его конец 12, воспринимающий усилие, подлежащее передаче, кинематически связан со вторым звеном). Блок обработки информации выполнен состоящим из аналого-цифрового преобразователя 13, вход которого через усилитель 14 с регулируемым коэффициентом усилия и аналоговый ключ 15 связан с выходом датчика веса 2, накапливающего сумматора 16, входы которого соединены с выходами аналого - цифрового преобразователя 13, а выходы через ключевую схему 17 связаны с индикаторным таблом 18, двоичного счетчика импульсов 19, работающего на вычитание, задающие входы которого соединены с программатором 20, а выходы - со входами логического элемента ИЛИ 21, двухвходового логического элемента И 22, первый вход которого соединен с входом датчика скорости 1 и параллельно через блок задержки 23 - со счетным входом счетчика импульсов 19, выход элемента ИЛИ 21 соединен со вторым входом элемента И 22 и параллельно через инвертор 24 - с управляющим входом ключевой схемы 17, выход элемента И 22 соединен с управляющим входом аналогового ключа 15, датчик веса 2 выполнен в виде нелинейного потенциометра, а весовая роликоопора 3 выполнена в виде ролика, состоящего из двух дисков 25 и 26 со ступицами 27 и 28, установленных на общей оси с возможностью встречного винтового перемещения, корпуса, образованного гибкими элементами 29, соединяющими диски по периферии, и распорной пружины 30, состоящей из двух секций, размещенной между ними, при этом в ступицах 27 и 28 дисков выполнены кольцевые проточки 31, а рычаги суммирующего механизма прикреплены к роликоопоре с помощью вилок 32, размещенных в проточках. При необходимости, на выходе датчика 1 может быть установлен формирователь импульсов (если он не входит в конструкцию датчика, хотя обычно входит), а на выходе датчика 2 может быть установлен фильтр, сглаживающий пульсации выходного сигнала датчика ( тот и другой на схеме не показаны). Что касается роликоопоры 3, то она может быть выполнена, например, на основе конструкции, защищённой патентом РФ на изобретение №2668493 (наилучший вариант), либо на базе конструкций по авторским свидетельствам СССР № 271365, 336230, 590204.
Перед эксплуатацией весов в усилитель 14 вводится коэффициент усиления δ, равный дискретности отсчета перемещения конвейерной ленты, а программатором 20 задается двоичное число, равное количеству дискрет отсчета перемещения, на протяжении которого требуется произвести взвешивание. Если, например, δ=5см, а нужно определить вес груза на 1 погонный метр, то число, вводимое в 20, равно  ( в двоичном коде это 10100).
( в двоичном коде это 10100).
При работе конвейера лента 33 перемещает груз в направлении, перпендикулярном плоскости фиг.1. В зависимости от нагрузки на ленту последняя прогибается, а диски 25 и 26 роликоопоры 3 занимают соответствующее ее прогибу положение, сжимая пружину 30 и продолжая поддерживать гибкие элементы 29 в натянутом состоянии. Датчик 2, представляя собой нелинейный потенциометр с характеристикой U=ƒ(F), где F - нагрузка на ленту, U - выходной сигнал потенциометра, передает это U усилителю 14 в момент поступления импульса от датчика 1 на аналоговый ключ 15 и умножает U на δ. Результат поступает в преобразователь 13. Все это происходит потому, что при вводе двоичного числа в программатор 20 он вводит это число в счетчик 19, а на выходе элемента ИЛИ 21 это инициирует сигнал «логическая единица». Когда от датчика 1 на элемент И 22 приходит импульс, тоже сигнал «логическая единица», то вместе с сигналом «логическая единица» от элемента ИЛИ 21 это вызывает «логическую единицу» на выходе И 22 и поступление этого сигнала на управляющий вход ключа 15. Из преобразователя 13 информация поступает на сумматор и добавляется к его содержимому. На указанные операции требуется некоторое время τ. На это время импульс, поступивший от датчика 1, задерживается блоком задержки 23. По истечении этого времени он проходит с выхода блока задержки на счетный вход счетчика 19 и уменьшает содержимое счетчика на единицу. При выдаче датчиком 1 следующего импульса цикл повторяется. И так продолжает происходить до тех пор, пока счетчик 19 не обнулится (число, заданное программатором, отработается). При обнулении счетчика на выходе элемента ИЛИ 21 сигнал «логическая единица» сменится сигналом «логический ноль», на выходе элемента И 22 окажется «логический ноль», ключ 15 не откроется, но появится «логическая единица» на выходе инвертора 24. Ключевая схема 17 пропустит число с выхода накапливающего сумматора 16 на индикатор 18, который покажет, какая нагрузка приходилась на ленту на ее длине, заданной программатором 20. Если в частности δ=5см, а в программатор вводилось число 20, то индикатор выдаст величину нагрузки на 1 погонный метр длины. Точность определения результата будет кратна δ/2. Применив датчик 1 с высокой дискретностью отсчета (в настоящее время существуют датчики, позволяющие получать один импульс на миллиметр) с помощью предложенных весов можно получать требуемые данные с точностью 0,1-0,3%.
Наряду в высокой точностью, предлагаемые конвейерные весы обладают и высокой надежностью, превышающей надежность прототипа, по крайней мере в 3-5 раз, что обусловлено простотой их конструкции и создает технический результат их разработки.
Конвейерные весы
Предлагаемое изобретение относится к технике непрерывного
взвешивания сыпучих материалов и может быть использовано в
строительстве и в производстве строительных материалов.
В настоящее время весы, аналогичные предлагаемым, известны. К'
ним относятся, в частности, конвейерные весы, защищенные авторским
свидетельством СССР №802805 от 02.11.1978, Они содержат весовые
роликоопоры, объединенные в пары, связанные механическими системами
передачи усилий, силоизмерительные датчики которых расположены по
разные стороны продольной оси конвейера. Однако такие весы обладают
недостаточной точностью и надежностью. Более точными и надежными
являются весы-аналог, содержащие два грузоприемных устройства,
включенных встречно друг другу, установленных на раме и имеющих в
своем составе два датчика веса и контргрузы (Проспект фирмы ЗАО
«Энергопред-Гидравлик»,М. , 2001г.) . Но указанные конвейерные весы
имеют сложную конструкцию, а потому тоже недостаточно надежны.
Вместе с тем • существуют конвейерные весы, защищенные патентом'
РФ на изобретение №2232979 от 23.09.2002, более простой конструкции:
и обладающие более высокой надежностью. Оки наиболее близки к
предлагаемым по технической сущности, а потому приняты нами в
качестве прототипа.
Насколько можно судить по их описанию, конвейерные весы-
прототип содержат датчик скорости, взаимодействующий с нижней ветвысн
конвейерной ленты, датчик веса, блок обработки информации, '
соединенный с выходами датчиков, две весовые роликоопоры,
установленные на раме конвейера, и суммирующий механизм в виде двух
рычагов равной длины, одними концами прикрепленных к роликоопорам, а
другими - к соединительному элементу, выполненному с двумя
шарнирами, имеющему подвижность в горизонтальной плоскости,.
передающему усилие рычагу масштабирования, связанному со входом
датчика веса.
Конструкция весов-прототипа обеспечивает их высокую точность и
приемлемую надежность при длительном сроке эксплуатации, что
позволяет значительно расширить диапазон их применения. Она обладает
меньшей металлоемкостью и создает удобство весов при их
использовании. Тем не менее, являясь более надежными, чем аналоги,'
весы-прототип все же менее надежны, чем это требуется при их
применении в составе автоматизированных производств. В связи с этим
возникает проблема дальнейшего повышения надежности конвейерных
весов, чего можно достичь дальнейшим упрощением их конструкции.
Технически разрешение этой проблемы обеспечивается за счет
того, что конвейерные весы, содержащие датчик скорости,
взаимодействующий с нижней ветвью конвейерной ленты, датчик веса,,
блок обработки информации, соединенный с выходами датчиков, весовую
роЛикоопору, установленную на раме конвейера, и суммирующий механизм
в виде двух рычагов равной длины, одним концом прикрепленных к
роликоопоре, а другим концом - к соединительному элементу,
выполненному' с двумя шарнирами, имеющему подвижность в.
горизонтальной плоскости, передающему усилие рычагу масштабирования,-
связанному со входом датчика веса, отличаются от прототипа тем, что
блок обработки информации включает в себя аналого-цифровой
преобразователь, вход которого через усилитель с регулируемым
коэффициентом усиления и аналоговый ключ связан с выходом датчика
веса, накапливающий сумматор, входы которого соединены с выходами
аналого-цифрового преобразователя, а выходы — через ключевую систему
связаны с индикаторным табло, двоичный счетчик импульсов, работающий
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНВЕЙЕРНЫЕ ВЕСЫ | 2002 |
|
RU2232979C2 |
| Устройство управления дозированной загрузкой железнодорожных вагонов | 1987 |
|
SU1422017A1 |
| СПОСОБ НЕПРЕРЫВНОГО ИЗМЕРЕНИЯ ВЕСА ПЕРЕМЕЩАЕМЫХ МАТЕРИАЛОВ НА ЛЕНТОЧНЫХ КОНВЕЙЕРАХ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И ВЕСОВАЯ РОЛИКООПОРА ЛЕНТОЧНОГО КОНВЕЙЕРА | 2009 |
|
RU2401994C1 |
| Способ поверки конвейерных весов | 1989 |
|
SU1663445A1 |
| Устройство контроля объемного веса руды на конвейерной ленте | 1982 |
|
SU1068725A1 |
| Конвейерные весы конвейеров прямого и реверсивного хода | 2016 |
|
RU2625042C1 |
| Суммирующие конвейерные весы | 1983 |
|
SU1117455A1 |
| Конвейерные весы | 1980 |
|
SU885817A1 |
| Конвейерные весы | 1978 |
|
SU717552A1 |
| Весы | 1989 |
|
SU1783314A1 |
Изобретение относится к в весоизмерительной технике, а именно к технике непрерывного взвешивания сыпучих материалов, и может быть использовано в строительстве и в производстве стройматериалов. Весы содержат датчик скорости, взаимодействующий с нижней ветвью конвейерной ленты, датчик веса, блок обработки информации, соединенный с выходами датчиков, весовую роликоопору, установленную на раме конвейера, и суммирующий механизм в виде двух рычагов равной длины, одним концом прикрепленных к роликоопоре, а другим концом – к соединительному элементу, выполненному с двумя шарнирами, имеющему подвижность в горизонтальной плоскости, передающему усилие рычагу масштабирования, связанному со входом датчика веса. Отличительной особенностью весов является то, что блок обработки информации в них включает в себя аналого-цифровой преобразователь, вход которого через усилитель с регулируемым коэффициентом усиления и аналоговый ключ связан с выходом датчика веса, накапливающий сумматор, входы которого соединены с выходами аналого-цифрового преобразователя, а выходы через ключевую схему связаны с индикаторным табло, двоичный счетчик импульсов, работающий на вычитание, задающие входы которого соединены с программатором, а выходы – со входами логического элемента ИЛИ, двухвходовой логический элемент И, первый вход которого соединен с выходом датчика скорости и параллельно через блок задержки – со счетным входом счетчика импульсов, выход элемента ИЛИ соединен со вторым входом элемента И и параллельно через инвертор – с управляющим входом ключевой схемы, выход элемента И соединен с управляющим входом аналогового ключа. Датчик веса выполнен в виде нелинейного потенциометра, датчик скорости – в виде датчика импульсов, а весовая роликоопора выполнена в виде ролика, состоящего из двух дисков со ступицами, установленных на общей оси с возможностью встречного винтового перемещения, корпуса, образованного гибкими элементами, соединяющими диски по периферии, и распорной пружины, размещенной между ними. При этом в ступицах дисков выполнены кольцевые проточки, а рычаги суммирующего механизма прикреплены к роликоопоре с помощью вилок, размещенных в проточках. Технический результат заключается в упрощении конструкции, повышении надежности и точности измерений конвейерных весов. 1 ил.
Конвейерные весы, содержащие датчик скорости, взаимодействующий с нижней ветвью конвейерной ленты, датчик веса, блок обработки информации, соединенный с выходами датчиков, весовую роликоопору, установленную на раме конвейера, и суммирующий механизм в виде двух рычагов равной длины, одним концом прикрепленных к роликоопоре, а другим концом – к соединительному элементу, выполненному с двумя шарнирами, имеющему подвижность в горизонтальной плоскости, передающему усилие рычагу масштабирования, связанному со входом датчика веса, отличающиеся тем, что блок обработки информации включает в себя аналого-цифровой преобразователь, вход которого через усилитель с регулируемым коэффициентом усиления и аналоговый ключ связан с выходом датчика веса, накапливающий сумматор, входы которого соединены с выходами аналого-цифрового преобразователя, а выходы через ключевую схему связаны с индикаторным табло, двоичный счетчик импульсов, работающий на вычитание, задающие входы которого соединены с программатором, а выходы – со входами логического элемента ИЛИ, двухвходовой логический элемент И, первый вход которого соединен с выходом датчика скорости и параллельно через блок задержки – со счетным входом счетчика импульсов, выход элемента ИЛИ соединен со вторым входом элемента И и параллельно через инвертор – с управляющим входом ключевой схемы, выход элемента И соединен с управляющим входом аналогового ключа, датчик веса выполнен в виде нелинейного потенциометра, датчик скорости – в виде датчика импульсов, а весовая роликоопора выполнена в виде ролика, состоящего из двух дисков со ступицами, установленных на общей оси с возможностью встречного винтового перемещения, корпуса, образованного гибкими элементами, соединяющими диски по периферии, и распорной пружины, размещенной между ними, при этом в ступицах дисков выполнены кольцевые проточки, а рычаги суммирующего механизма прикреплены к роликоопоре с помощью вилок, размещенных в проточках.
| КОНВЕЙЕРНЫЕ ВЕСЫ | 2002 |
|
RU2232979C2 |
| Ролик ленточного конвейера | 2017 |
|
RU2668493C1 |
| Весы | 1989 |
|
SU1783314A1 |
| Суммирующие конвейерные весы | 1983 |
|
SU1117455A1 |

