, rf-. i.- 4« «и
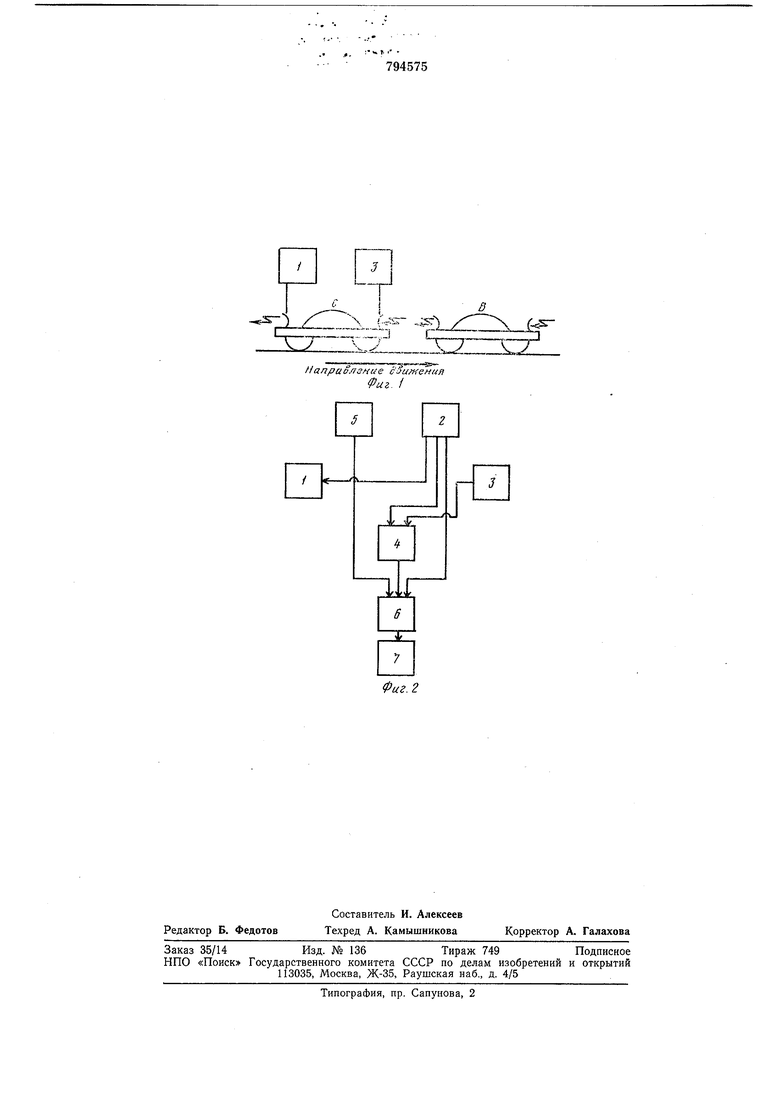
, s безопасной дистанции между движущимися транспортными средствами, содержащее блок определения дистанции между собственным и впереди идущим транспортными средствами, блок определения тормозного пути собственного транспортного средства, выходы которых подключены ко входам блока вычисления безопасной дистанции, выход которого соединен со входом исполнительного устройства, введены передатчик для передачи информации о тормозном пути собственного транспортного средства идущему сзади транспортному средству, вход которого соединен с выходом блока определения тормозного пути собственного транспортного средства, приемник для приема информации о тормозном пути впереди идущего транспортного средства, корректирующий блок, ко входам которого подключены выходы приемника и блока определения тормозного пути собственного транспортного средства, а выход корректирующего блока соединен с третьим входом блока вычисления безопасной дистанции. , На фиг. 1 изображена схема динамического взаимодействия впереди идущего транспортного средства (В) и собственного (С). На фиг. 2 изображена блок-схема устройства для - обеспечения безопасной дистанции между движущимися транспортными средствами. Передатчик 1, со входом которого соединен выход блока 2 определения тормозного пути, передает информацию о тормозном пути собственного транспортного средства С идущему сзади транспортному средству. Нриемник 3, выход которого соединен со входом корректирующего блока 4, принимает информацию от впереди идущего транспортного средства В о его тормозном пути. Блок 5 определения дистанции между собственным и впереди идущим транспортными средствами содержит приемо-передающее устройство для индикации впереди идущего транспортного средства и для оп.ределения дистанции до него. Выходная характеристика блока 5 LBC является одной из входных характеристик блока 6 вычисления безопасной дистанции. Блок 2 определения тормозного пути собственного транспортного средства С включает в себя систему датчиков, определяющих эксплуатационно-динамическую характеристику .тормозной системы транспортного средства ,(Кс), скорость движения транспортного средства (Vc), массу транспортного средства с грузом (Мс), состояние дорожного полотна (ф), планиметрическую характеристику дорожного полотна (I) и преобразователь комплекса характеристик в величину потенциального тормозного пути в текущих условиях движения: 5с Р(Кс,Ус,Мс,ф,1),
, f. f , .; - 794575 которая является его выходной характеристикой и одной из входных характеристик корректирующего блока 4 и входной характеристикой передатчика 1 для передачи информации о тормозном пути собственного транспортного средства С идущему сзади транспортному средству. Блок 2 определения тормозного пути собственного транспортного средства С имеет выходную характеристику Vc, которая является второй входной характеристикой блока 6 вычисления безопасной дистанции. Приемник 3 принимает информацию о тормозном пути впереди идущего транспортного средства В, например, в виде электромагнитного сигнала определенной частоты CUB, пропорциональной величине тормозного пути передающего транспортного средства; при этом он имеет выходную характеристику:5в А-сов, где А - коэффициент пропорциональности, постоянный для приемника и передатчика каждого транспортного средства, которая является одной из входных характеристик корректирующего блока 4. Выход корректирующего блока 4 характеризуется разностью тормозного пути собственного транспортного средства Sc и впереди идущего SB: Os Ос WB, которая является третьей входной характеристикой блока 6 вычисления безопасной дистанции. В блоке 6 вычисляется безопасная дистанция: L Vc-lan + lo + 6s, где tan - время от момента поступления сигнала на приемник 3 до момента срабатывания тормозной системы транспортного средства (аппаратурная константа); 1о - минимальная допустимая дистанция между движущимися транспортными средствами (аппаратурная константа). Большая из величин L или Vo-tan + b сравнивается с дистанцией LBG. Результат сравнения является выходной характеристикой блока 6 и входной характеристикой исполнительного устройства 7. При этом, если LBc Vc-tan+lo при , или при , исполнительное устройство 7 выает сигнал о наличии резерва безопасной истанции; если LBc Vc-tan + lo при , или при , то исполнительное стройство осуществляет замедление собстенного транспортного средства с интенивностью, пропорциональной величине деицита безопасной дистанции, в результате оторого дистанция до впереди идущего ранспортного средства увеличивается до езопасной.
Работает устройство следующим образом. При дистанции между собственным транспортным средством и впереди идущим, превышающей большую из величин L или Vo-tan + lo, водитель собственного транспортного средства получает сигнал от исполнительного устройства 7 о наличии резерва безопасной дистанции, т. е. о возможном поддержании или сокращении дистанции до впереди идущего транспортного средства. При сокращении дистанции до впереди идущего транспортного средства до величины, менее допустимой, т. е. менее большей из величин L или Vc-tan-flo, исполнительное устройство 7 вводит в действие тормозную систему собственного транспортного средства, в результате чего увеличивается дистанция до впереди идущего транспортного средства с интенсивностью, пропорциональной разности L-LBG при или
(Vc-tan+lo)-LBC при .
Время от момента поступления сигнала на приемник 3 до момента срабатывания тормозной системы транспортного средства учитывается в виде аппаратурной константы tan. В результате при устройство не позволяет сократить дистанцию между движущимися транспортными средствами до величины, менее необходимой и достаточной для достижения полного эффекта торможения, с учетом дополнительной минимально допустимой дистанции между движущимися транспортными средствами (Yc-tan+lc)- Снижение скорости движения собственного транспортного средства производится до тех пор, пока дистанция до впереди идущего транспортного средства LBG не достигнет безопасной величины.
Использование данного устройства позволит исключить основную причину дорожно-транспортных происшествий, связанных с несоблюдением дистанции. Кроме того, за счет сокращения суммарного времени срабатывания тормозной системы и времени реакции водителя, определяемого переходом от времени реакции и срабатывания ко времени прохождения, например, электромагнитного сигнала от приемника до исполнительного устройства, сокращается, при прочих равных условиях, расстояние безопасного взаимодействия между
транспортными средствами, т. е. создаются резервы увеличения плотности транспортных потоков на дорогах; тем самым увеличивается их пропускная способность. Данное устройство позволяет упростить процесс управления транспортным средством в напряженной обстановке оживленной транспортной магистрали благодаря освобождению водителя от функций оценки и сохранения безопасной дистанции до впереди идущего транспортного средства.
Формула изобретения
Устройство автоматического обеспечения безопасной дистанции между движущимися транспортными средствами, содержащее блок определения дистанции между собственным и впереди идущим транспортными
средствами, блок определения тормозного пути собственного транспортного средства, выходы которых подключены ко входам блока вычисления безопасной дистанции, выход которого соединен со входом исполнительного устройства, отличающееся тем, что, с целью сокращения безопасной дистанции и повышения плотности транспортных потоков, оно дополнительно содержит передатчик для передачи информации
о тормозном пути собственного транспортного средства идущему сзади транспортному средству, ко входу которого подключен выход блока определения тормозного пути собственного транспортного средства, приемник для приема информации о тормозном пути впереди идущего транспортного средства, корректирующий блок, ко входам которого подключены выходы приемника и блока определения тормозного пути собственного транспортного средства, а выход корректирующего блока соединен с третьим входом блока вычисления безопасной дистанции.
Источники информации, принятые во внимание при экспертизе
1.Патент США № 3898652, кл. 180-98, опублик. 1975.
2.Авторское свидетельство СССР № 457054, кл. G 01 S 9/68, 1975 (прототип).
Наприоление с тжения
Фиг. /