г г
:
Г
й...
i
..J
(Л
Ичобр 0)ше пт, к сиетемам v-i рг1В. 1ени/ автомобилем. 1и поль:(ую1и1; io кацио ные .лг тчики, в частности длч ;;:.) би.рй. переь -.зя .чи) людей, onacHbie i p ;ы или ciie ina.u Н )е о6ор}довани изоб ретения являн Г(.я повышение 6o3una . ;iOi T4 .,ии/кения автомобиля в потоке. Устройство 1.оде)1;ит два локационных датчика: передний 2 ii задней 3, осуществляющих локацию впереди и сзади движущихся авгомо- Г) c(joTEeTCTBeHHO. Информация от них, , I :к.е от датчика 6 собственной скорости, блоков определения абсолютных скоростей ., реди 7 и сзади 8 движущихся автомоби- тей пос1уиает в блок 9 расчета опти- м.:; ;;.И1 Й дистанции до впереди движущегося зв омобиля, определяемой по критерию минима.льной и о.т,инаковой степени тяжес- к : ;:змо/кных столкновений с передним и с 5а;и;.;м .-вюмог -лнми Сигнал с выхода гекчцей и оптимальной .UiC ::ч1,1ии упрапляеп исполнительным ме- xaни, 12 т(ч1лнвоподачи и сигна. шза- Ton.-.t i. I з.п., 4 ил. 
.
.
00
ОО О1
Х)
4
Фи. 2
Изобретение относится к автомобильной технике, а именно к системам автоматического управления, автомобилем, использующим локационные датчики, и может быть особенно полезно для автомобилей, переводящих людей, опасные грузы или специальное оборудование.
Целью изобретения является повыщение безопасности движения автомобиля в потоке.
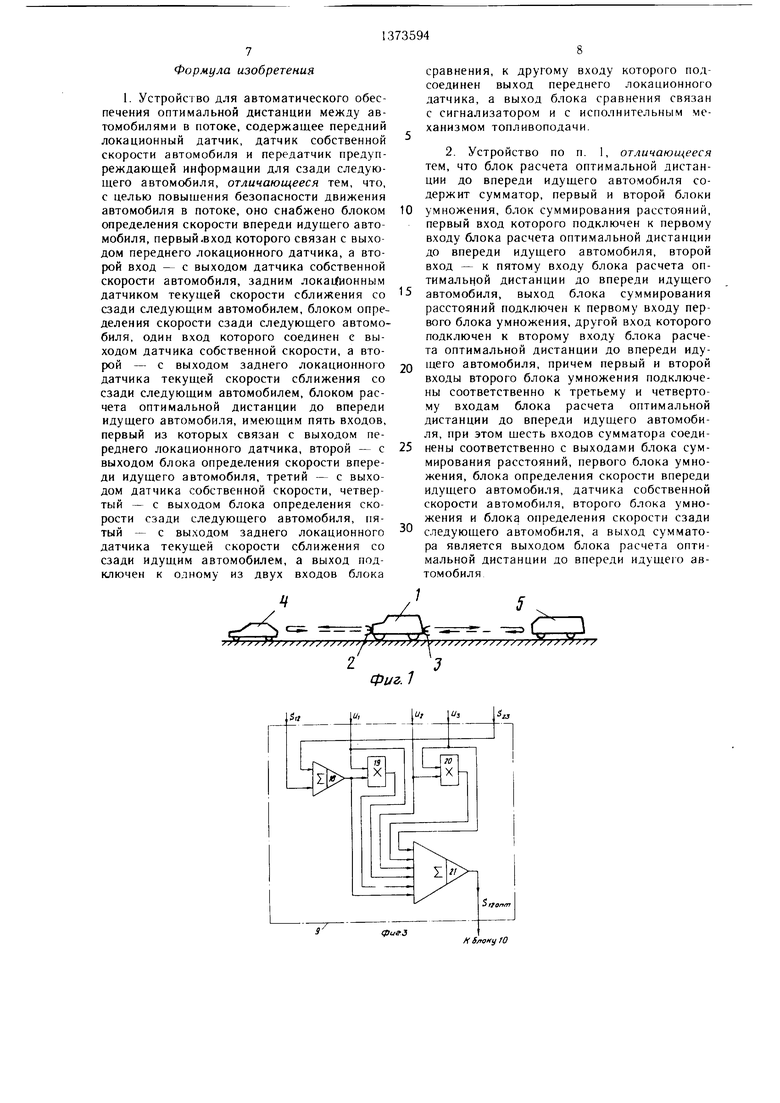
На фиг. 1 изображена кинематическая схема расположения автомобилей на дороге и их взаимодействие; на фиг. 2 - блок- схема устройства автоматического обеспечения оптимальной дистанции между автомобилями в потоке; на фиг. 3 - вариант устройства блока расчета оптимальной дистанции; на фиг. 4 - графики, иллюстрирующие влияние некоторых параметров движения автомобилей на оптимальную дистанцию.
Автомобиль 1 (фиг. 1) снабжен устройством автоматического обеспечения оптимальной дистанции, с помощью которого осуществляют локацию впереди идущего автомобиля 4 и сзади следующего автомобиля 5 соответственно (двухнаправленное слежение).
Устройство для автоматического поддержания оптимальной дистанции (фиг. 2) состоит из переднего 2 и заднего 3 локационных датчиков, датчика 6 собственной скорости автомобиля, блока 7 определения скорости впереди идущего автомобиля, блока 8 определения скорости сзади следующего автомобиля, блока 9 расчета оптимальной дистанции до впереди идущего автомобиля, блоко Ю сравнения текущей дистанции до ппсреди идущего автомобиля с оптимальной,передатчика II предупреждающей информации для сзади следующего автомобиля (микроволнового, светового, звукового или иного типа) и автоматизированного 1сполнительного механизма 12 топ- ливоподачи двигателя. Блоки 7, 8 и 10 являются простейщими сумматорами. Отрицательный вход сумм тора 7 соединен с выходом сигнала относительной скорости сближения Vi2 со впереди идущим автомобилем датчика 2, а положительный вхол - с выходом датчика 6 собственной скорости V2. Сумматор 8 имеет два положительных входа, оаин из которых соединен с выходом датчика 6 собственной скорости, другой -- с зыходо.м сигнала относительной скбрости сближения V23 со сзади следующим автомобилем датчика 3. Пять входов блока 9 расчета оптимальной дистанции связаны по отдельности соответственно с выходом сигнала расстояния Si2 до впереди идущего автомобиля датчика 2, с выходом сигнала скорости Vi впереди идущего автомобиля су.мматора 7, с выходом датчика 6 собст- , венной скорости V2. с выходом сигнала скорости V2 сзади следуюалего автомобиля сумматора Вис выходом сигнала расстояния S23 до сзади следующего автомобиля датчика 3. Указанная совокупность параметров используется в блоке 9 для определения оптимального собственного положения автомобиля относительно одновременно и впереди идущего, и сзади следующего, которое характеризуется величиной потребной дистанции до впереди идущего автомобиля, поскольку эта величина определяет косвенно
О и потребное оптимальное расстояние до сзади следующего автомобиля при заданном в каждый момент времени расстояния от впереди идущего автомобиля 4 (фиг. 1) до сзади следующего автомобиля 5. Крите2 рием оптимальности является равенство оценок степени тяжести возможных столкновений со впереди и со сзади движущимися автомобилями вследствие экстренного торможения впереди идущего автомобиля 4 и при соответствующей тормозной реакции опе0 раторов автомобилей I и 5. Выбор критерия «Равенство оценок степени тяжести, столкновений, а не нулевое их значение, что имеет место в известных устройствах, позволяющих выдерживать безопасную дистанцию до впереди идущего автомобиля без учета наличия сзади следующего автомобиля, обусловлен тем, что в общем случае, характеризующимся двухсторонним приближением на опасные расстояния одновременно и впереди идущего, и сзади следующего автомобилей,
Q нет возможности в экстренной ситуации предотвратить столкновение хотя бы с одним из них. Уравнивание тяжести столкновений снижает тяжесть последствий наиболее опасного из них и, следовательно, тяжесть столкновений для автомобиля 1.
5 При выборе конкретного оценочного параметра степени тяжести принимается во внимание следующее.
Можно считать, что тяжесть столкновения пропорциональна энергии удара, тогда степень тяжести оценивается величиной
потерянной кинетической энергии при столкновении. Столкновения автомобилей можно отнести к типу абсолютно неупругих ударов, т.е. таких, при которых вся потерянная кинетическая энергия идет, например, на
с деформацию кузовов. Для такого тип удара для автомобилей равной полной массы потерянная кинетическая энергия пропорциональна квадрату относительной скорости между ними в момент столкновения. Поэтому степень тяжести 1-,толкновения оце0 нивается величиной квадрата относительной скорости к моменту столкновения.
Этот оценочный параметр является кинематическим, а, следовательно, его величина полностью может быть ипределена по исходным координатам положения (Si2
5 и 823) и абсолютных скоростей (Vi-Уз) элементов системы и по ее динамическому состоянию. Динамика С1;л: мы задается, как обычно при экстренных (орможеннях, во-первых, условием, что в зоне контакта колес с дорогой тормозные силы у всех колес одновременно достигают максимально возможных по сцеплению величин, а, во-вторых, что коэффициенты сцепления одинаковы у всех колес и остаются неизменными в течение всего времени установившегося торможения.
Приведенное доказательство подтверждает, что при заданных условиях сцепления колес с дорогой совокупность именно величин Si2, S23, , являющихся входными параметрами блока 9 расчета оптимальной дистанции (фиг. 2), оказывается необходимой и достаточной для оценки в блоке 9 степеней тяжести возможных столкновений со впереди идущим и со сзади следующим автомобилями и для определения путем вариации величины исходного расстояния Si2 (при сохранении (5:2+52з) const) значения оптимальной дистанции SH.HT до впереди идущего автомобиля.
Выход блока 9 соединен с отрицательным входом блока 10 сравнения, являющегося сумматором, положительный вход которого связан с выходом сигнала текущего расстояния до впереди идущего автомобиля переднего локационного датчика 2. Выход блока сравнения подключен к передатчику 11 предупреждающей информации для сзади следующего автомобиля, а также к автоматизированному исполнительному механизму 12 топливоподачи двигателя автомобиля. Передатчик 11 может быть микроволнового, оптического, акустического или иного типа. В простейшем случае - это оптический стоп-сигнал, извещающий водителя заднего автомобиля об уменьщении скорости и состоящий из сигнальной лампы 13, транзисторного ключа на основе транзистора 14 р-п-р-типа и входного резистора 15, разде- литетьного диода 16, источника 17 питания д,1я лампы 13 (клемма «-). Разделительный диод 16 и входной резистор 15 включены в базовую цепь транзистора 14, причем ка- 1ид диода 16 соединен с входом в целом передатчика 11. Лампа 13 питается от источника 17 и находится в эмиттерной цепи транзистора. Коллектор транзистора соединен с «минусом источника.
Взаимосвязь входных и выходного параметров по виду (1) обуславливает наличие в блоке 9 следующих элементарных вычислигельных устройств (фиг. 3). сумматора 18 для сложения сигналов расстояний 5,1 и S23 и получения сигнала расстояния L, блока 19 умножения для перемножения сигналов L и скорости Vi впереди идущего автомобиля, блока 20 умножения для перемножения сигналов собственной скорости Vv и скорости УЗ сзади следующего автомобиля и выходного сумматора 21, выполняющего сложение сигналов L, L- Vi, Vi, V2, V2- V.I и УЗ с соответствующими коэффициентами передачи входов в него
по виду (1) и формирующего на выходе сигнал оптимальной дистанции . Один вход сумматора 18 соединен с каналом сигнала расстояния Si2 до впереди идущего автомобиля, другой - с каналом сигнала расстояния S23 до сзади следующего автомобиля. На один вход блока 19 умножения подается сигнал с выхода сумматора 18, другой вход связан с каналом сигнала скорости У|. Первый вход блока 20 умножения подключен к каналу сигнала собственной скорости У2, второй - к каналу сигнала скорости Уз. Входы выходного сумматора 21 соединены соответственно с выходом сумматора 18, с выходом блока 19 ум5 ножения, с каналом сигнала скорости У|, с каналом сигнала скорости У2, с выходом блока 20 умножения, с каналом сигнала скорости УЗ- Выход сумматора 21 является выходом в целом блока 9.
0 Устройство работает следующим образом. При произвольном режиме движения каждого автомобиля из рассматриваемой группы их абсолютные скорости У|-Уз и относительные расстояния Si2 и 823 изменяются. Информация об этом вводится в устройство с помощью переднего и заднего 3 локационных датчиков, а также датчика 6 собственной скорости. В сумматоре 7 по сигналу относительно скорости У12 со впереди идущим автомобилем с переднего датчика
Q 2 и сигналу собственной скорости У2 с датчика 6 рассчитывается скорость У впереди идущего автомобиля
У, УЗ - У, 2
в сумматоре 8 скорость Уз сзади следующего автомобиля определяется по сигна- 5 лу собственной скорости У2 с датчика 6 и сигналу относительной скорости У2з со сзади следующим автомобилем с заднего датчика 3
УЗ У2 + V23.
Сигнал скорости У: с выхода сумматора 7,
0 сигнал скорости Уз с выхода сумматора 8, а также сигналы Si2. У2 и S2j с датчиков 2, 6 и 3 соответственно поступают в блок 9, где рассчитывается оптимальная дистанция Si2onT. Выходной сигнал сравниJ вается в блоке 10 с сигналом текущей дистанции Si2. Сигнал рассогласования AS : Si2- 5|2опт поступает на исполнительный механизм 12 топливоподачи и передатчик 11 предупреждающей информации. Если действительная дистанция
0 превышает требуемую (оптимальную), т.е. , то механизм 12 осуществляет увеличение подачи топлива и разгон автомобиля При механизм 12 обеспечивает уменьшение топливоподачи и замедление автомобиля. Одновременно отрицательный сиг нал AS проходит через разделительный диод 16 передатчика II и входной резистор 15, что приводит к открытию транзистора 14 и, следовательно, к загоранию лампы 13 стопеи1 na. ia. Таким образом, обеспечивается поддержание оптимальной при текущих параметрах погока автомобилей дистанции и предупреждение водителя сзади следующего автомобиля о необходимости снижения ско рости.
Блок 9 расчета оптимальной дистанции может быть выполнен различным образом по сложности конструкции и алгоритму функционирования. В частности, его устройство регламентируется следующим полиноминальным соотрюшением между входными и выходными сигналами;
Si .«иг -87,72 + 2,50 L+1,82V, - 0,1282 -L -,+3,11 V,+2,9 - Vз- (),ll22 -V. -Уз(1) 1деЬ. Su, + S,3.
Указанное соотношение справедливо с погрешностью 10% при коэффициенте сцепления ко,тес с дорогой ц 0,7 и изменении входных параметров в диапазонах: 1. (К) 30) м; V. (14,5 24,5) м/с; V, : (14.5 24,5) м/с; Уз (14,5 30) м/с.
(л)отио1иение (I) получено методом имитационного моделирования с использованием численного решения задачи Кощи для системы дифференциальных уравнений, опи- 1.4)1иик)1цих движение рассматриваемой груп- . иггомобилей фиг. 1) при экстренных г()рмо/кениях t y-k-TOM перерасирсде.чения энергии ри последовательных столкнове- , ;| ,чкже с использованием оптими- 1ацио:1. ;1роце. IKJ критерию равенства Шснок k Г -мени 1яжести столкновений. В исходныч данных .чтены следующие средне- статические (нач1пия пара.мсгров быстродействия T(jr MO3Hbrx приводов при экстренных торможениях: время нарастания замедления впе|)еди илущего автомобиля равно 0,2 с, время : ,апаздывания автоматизированного тормозного привода автомобиля 1 0,3 с, время нарастания его замедления 0,.3 с, время реакции водителя сзади следующего автомобиля1,0 с, время . паздывания привода этого автомобиля 0,2 с, а время нарастания замедления - 0,2 с.
Алгоритм функционирования блока 9 «жесткий и строго определяется процедурой формирования полиномиальног о соотношения межд входными и выходными сигналами по виду (1). В блоке 18 по входным сигналам Su и S;.,) формируется сигнал их L суммы. В блоке 19 происходит умножение величин V l и (., а в блоке 20 - умножение ве;|ичин и V.). От этих блоков сигналы L, Vi L, Vv- - з, а также Vi з со входов блока 9 поступают в сумматор 21, где сигнал на выход|е соответствует величине оптима.чьной дистанции.
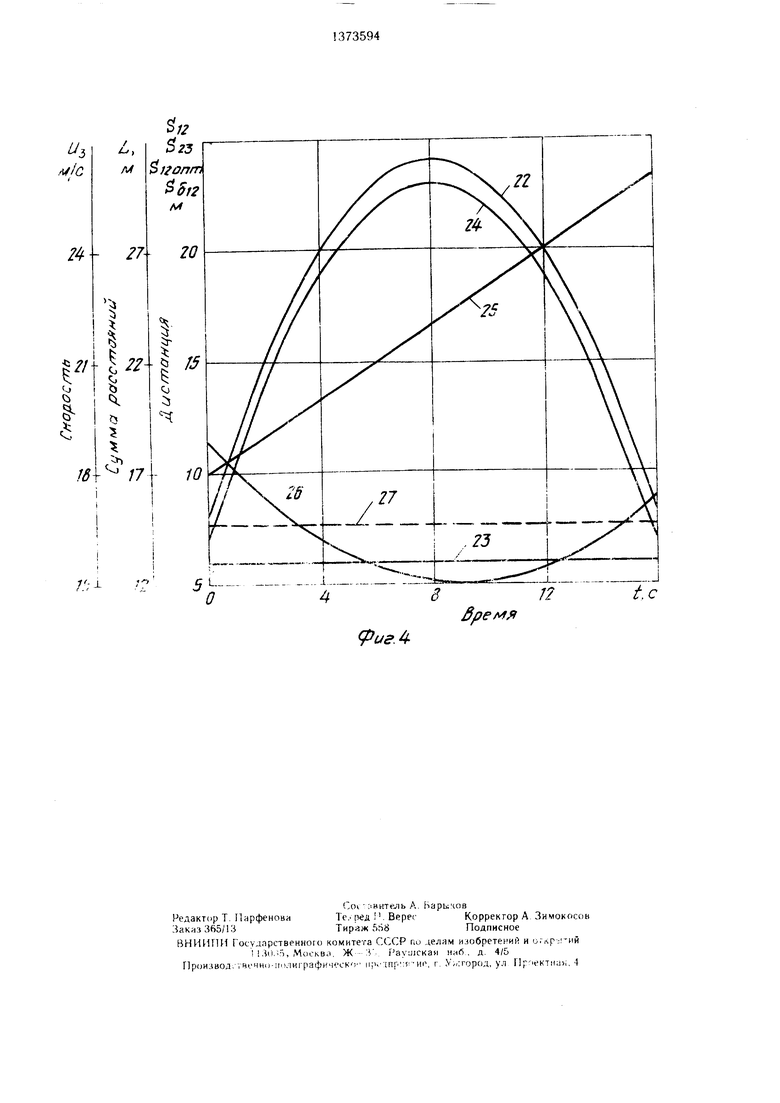
Графики на фиг. 4 ил;1юстрируют влияние на величину выходного сигнала блока 9 (оптимальную дисганцию) изменения некоторых параметров движения автомобилей.
Эти зависимости получены по соотношению () при следующих частных условиях: V| V2 22 м/с const (рассматриваем движение автомобиля 1 без регулирвания собственного режима дви жения),
Si2 6 м/с const
скорость УЗ заднего изменяется во времени по закону
УЗ Узн -(- 0,5 Т.
0 рдр V „ 18 м/с - скорость заднего автомобиля в начальный момент рассматриваемого периода времени; 1 - текущее время, с; величина дистанции 823 до заднего автомо5
0
5
0
5
биля при этом переменна
(У2- y3)(it S23H+(y2-y.) t-0,25- t ,
где S23 8 м расстояние 823 при . Суммарное расстояние 12 + оказывается, таким образом, тоже изменяющимся во времени. Кривая 22 на фиг. 4 определяет изменение расстояния S до заднего автомобиля, график 23 - расстояние Si2 до впереди идущего автомобиля, кривая 24 - изменение суммарного расстояния L, график 25 - изменение скоросги УЗ заднего автомобиля, а кривая 26 изменение оптимальной дис танции во времени Вс личина потребной (оптимальной) дистанции колеблется при этом в широком .яиа- 1с)зоне (5,0- 11,2) м сравнить :1ту зависимость о значением безопас- носгной дистанции Sg, до впереди идущеп; авюмобили (регу;пфуемый параметр в устройствах-аналогах и прототипе), определяемой по следующей известной формуле без учета наличия сзади следующею авто0,5- гм2) -0,5У:- 5
5
0
где Ti2 - время запаздывания тормо: ного привода;;
Тн2 время нарастания заме.лления;
установившееся замедление анто- моби.ля 1 (фиг 1);
тн| время нарастания заме.ления.
установившееся замедление автомобиля 4.
При принятых ранее значениях параметров, вхол.ящих .3 эту формулу, имеем SA2 -7,7 м - const. Величина .S(Ji2 отмечена на фиг. 4 линией 27. Оптимальная дистанция (график 26) в начале процесса значительно превышает безопасную дистанцию, затем становится меньше, а потом больще ее. Это своеобразно, косвенно еще раз подтверждает отлич 1е предлагаемого устройст ва от известных.
Формула изобретения
.-,
5
сравнения, к другому входу которого подсоединен выход переднего локационного датчика, а выход блока сравнения связан с сигнализатором и с исполнительным механизмом топливоподачи.
0 умножения, блок суммирования расстояний, первый вход которого подключен к первому входу блока расчета оптимальной дистанции до впереди идущего автомобиля, второй вход - к пятому входу блока расчета оптимальной дистанции до впереди идущего автомобиля, выход блока суммирования расстояний подключен к первому входу первого блока умножения, другой вход которого подключен к второму входу блока расчета оптимальной дистанции до впереди идущего автомобиля, причем первый и второй входы второго блока умножения подключены соответственно к третьему и четвертому входам блока расчета оптимальной дистанции до впереди идущего автомобиля, при этом щесть входов сумматора соеди5 нены соответственно с выходами блока суммирования расстояний, первого блока умножения, блока определения скорости впереди идущего автомобиля, датчика собственной скорости автомобиля, второго блока умножения и блока определения скорости сзади следующего автомобиля, а выход сумматора является выходом блока расчета оптимальной дистанции до впереди идущего автомобиля
0
0
Г-
Н S/roHijtO
t.C
игЛ
| Авторское свидетельство С(,СР № 794575, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
