(54) СЛЕДЯЩИЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| ИНТЕГРИРОВАННАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2321020C1 |
| Следящий электропривод | 1980 |
|
SU903804A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| Следящая система | 1979 |
|
SU840798A1 |
| ИНТЕГРИРОВАННАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2327188C1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2014 |
|
RU2537256C1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
Изобретение относится к система автоматического управления и может быть использовано в следящих приводах для улучшения динамических характеристик в переходных режимах.
Известны следящие приводы, в которых используются датчики входной и выходной координат, датчики скорости входной и выч ходной координат, интегро-пропорцирндльные: преобразователи, усйлйтёльйы«гиисполнительные устройства 1,2.
Однако такие приводы при достаточно высоких точностях, получаемых в этих приводах, обладают довольно высокой колебательностью в переходных режимах.
По технической сущности наиболее близким л изоб|ретен«ю является следящий привод, содержащий блок сравнения, ко входам которого подключены датчики входной координаты и датчик выходной координаты, кинетически связанный с выходом усилительно-исполнительного блока, вход которого через интегратор соединен с выходом блока сравнения, а также датчик скорости выходной координаты, кинематически связанный с датчиком входной координаты, и датчик скорости выходной координаты, кинематически связанный с выходом усилительно-исполнительного блока, и блок ограничения (3.
В этом устройстве в установйвщемся режиме обеспечивается автоматический переход от пропорционального закона регулирования к интегральному.
Такое переключение интегрального и пропорционального законов регулирования по уровню входного сигнала не полностью обеспечивает требуемые динамические характеристики следящего привода.в передод: пых режимах, поскольку прейышейиё уровня ограничения возможно и при отдельных случайных выбросах входного сигнала.
Цель изобретения - повыщение динамической точности следящего привода в переходных режимах и снижение колебательности переходного процесса.
Эта цель достигается тем, что в предложенный следящий привод введены блок сравнения абсолютных величин сигналов, пороговый блок и ключ. Датчики скорости входной и выходной координат подключены к блоку сравнения абсолютных величин сигналов, выход которого через пороговый блок связан с управляющим входом ключа, сигнальный вход которого соединен с выходом интегратора, а выход - с соответствующим входом интегратора.
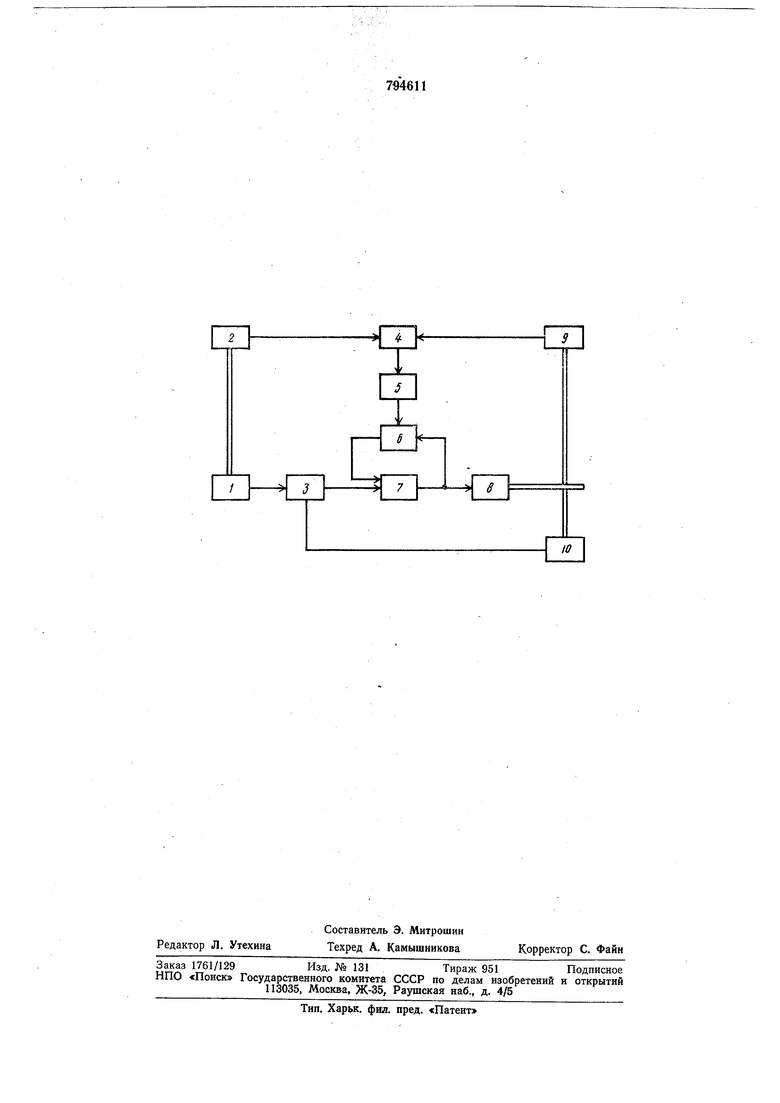
На чертеже изображена блок-схема устройства.
Оно содержит датчик / входной координаты, датчлк 2 Скорости входной координаты, блок сравнения 3, блок сравнения 4 абсолютных величин сигналов, пороговый блок 5, ключ 6, интегратор 7, усилительно-исполнительный блок 5, датчик скорости 9 выходной координаты и датчик 10 выходной координаты.
Датчик / входной координаты и датчик 10 выходной координаты, установленный на исполнительной оси привода, соединены с блоком сравнения 3, который связан через интегратор 7 с усилительно-исполнительным устройством 8. Датчик 2 и датчик 9, установленный на исполнительной оси привода, подключены к блоку 4 сравнения абсолютных величин сигналов, выход которого через пороговый блок 5 связан с управляющим входом ключа 6, сигнальный вход которого соединен с выходом интегратора 7, а выход - со вторым входом интегратора 7.
Устройство работает следующим образом.
В установившемся режиме сигнал рассогласования, сформированный датчиками Л и 10, поступает с блока сравнения 5 на интегратор 7 и далее на усилительно-исполнительный блок 8. При этом сигналы, снимаемые с датчиков 2 vi 9, подаются на блок 4 сравнения абсолютных величин сигналов, а оттуда на пороговый блок 5.
При превышении в переходном режиме разностью абсолютных величин сигналов датчиков 2 и 9 величины порога срабатывания порогового блока 5 сигнал поступает на управляющий вход ключа 6, при срабатывании которого замыкается жесткая отрицательная обратная связь, охватывающая интегратор 7.
Таким образом, в установивщемся режиме с целью уменьшения ошибки слежения в цепь сигнала рассогласования подключен интегратор 7. В переходных же режимах интегратор 7 охватывается жесткой отрицательной обратной связью, т. е. интегральное регулирование заменяется пропорциональным регулированием. Это позволяет существенно улучшить динамические характеристики привода в переходных режимах.
Формула изобретения
Следящий привод, содержащий блок сравнения, ко входам которого подключены датчики входной координаты и датчик выходной координаты, кинематически свяванный с выходом усилительно-исполнительного блока, вход которого через интегратор соединен с выходом блока сравнения, а также датчик скорости входной координаты, кинематически связанный с датчиком входной координаты, и датчик скорости выходной координаты, кинематически связанной с выходом усилительно-исполнительного блока, отличающийся тем, что, с целью повышения динамической
точности устройства, оно содержит блок сравнения абсолютных величин и сигналов, пороговый блок и ключ, датчики скорости входной и выходной координат подключены к блоку сравнения абсолютных величин сигналов, выход которого через пороговый блок связан с управляющим входом ключа, сигнальный вход которого соединен с выходом интегратора, а выход - с соответствующим входом интегратора.
Источники информации, принятые во внимание при экспертизе:
1967, с. 78. . ,
