(54) СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для синхронизации объектов | 1975 |
|
SU607180A1 |
| Следящий электропривод | 1981 |
|
SU1022137A1 |
| Регистрирующее устройство | 1980 |
|
SU964447A2 |
| Реверсивный электропривод | 1991 |
|
SU1791951A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОБЪЕМНОГО РАСХОДА ВЕЩЕСТВ С ПОМОЩЬЮ УЛЬТРАЗВУКОВЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2169906C2 |
| Устройство для электроэрозионного легирования | 1988 |
|
SU1664486A1 |
| Электропривод переменного тока | 1989 |
|
SU1753574A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1992 |
|
RU2050673C1 |
| СТАБИЛИЗИРОВАННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПОСТОЯННОГО НАПРЯЖЕНИЯ С ЗАЩИТОЙ | 1991 |
|
RU2024171C1 |

1
Изобретение относится к системе автоматического регупирования и может быть использовано в радиостроении и приборостроении.
Известен следящий электропривод, содержащий в цепи управления испопнитет1Ь- ным эпектродвигатепем сегаьсин и синхронный тахогенератор 11.
Однако кинематически взаимосвязанный тахогенератор не удовлетворяет требованиям по надежности из-за сложности кинематики, и па точности, иэ-за несовпадения характеристик усипитепей, применяемых в электронной схеме управления.
Наиболее бпизким по технической сущности к предпагаемому является спедя- щая система, содержащая датчик и приемник, выход которого через усигштепь подключен к испопнитепьному эпектродвигатепю, эпектронную схему управления, вход которой подключен к датчику, ft выход - к:уси1штегао, причем ротор испопнитепьного двигателя через редуктор
связан с вращающимся элементом дат- чика 2.
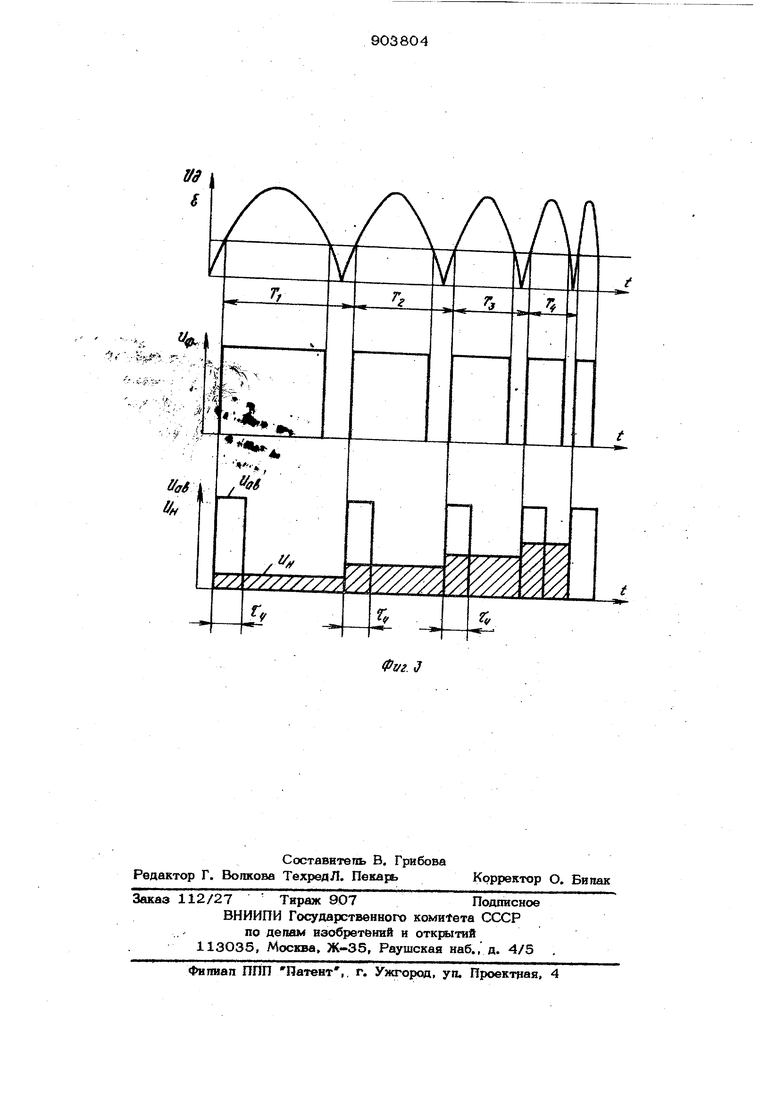
К недостаткам известного устройства относятся ограниченная точность спеже- ния, поскольку при изменении нагрузки или скорости вращения возникает разность угловых положений входного и выходного валов в виде ощнбки, величиной до - где и - число электрической редукции для многопопюсных датчиков или передаточное отношение между чувствительной осью объекта и датчиком. Известная спе- дяшая система предназначена для работы в устройствах автоматики и вычислительной техники, где требования к ее динамической точности понижены, учитывается пишь ее статическая точность при отработке угла рассогласования, а не в динамике переходных процессов, таким образом допускается использование двух каналов регулирования грубого и точного, что в случае непрерывной работы следящего электропривода в широ- :ком диапазоне изменения скорости приводит к постоянным колебаниям угпа рассог пасования. Кроме того, работа приводного электродвигателя при неизменном моменте нагрузки в условиях меняющейся скорости требует пропорционального изменения мощности на его валу, что может быть обеспечено описанной системой при неизменном коэффициенте усиления усилителя путем изменения угла рассогласования и при уветшчении скорости, практически переходом на грубый канап слежения, а также к перерегулированию, т.е. ошибка снижения может достигнуть 360. К недостаткам системы можно отнести большое число соединительных проводов, посколько связь между датчиком и приемником осуществпяется не только сигнальными пиниями, но и двухпроводной пинией питания, что большой удаленности датчика от приемника иногда неприемлемо, а также относите1изно сложную электронную схему управления и наличие электромеханического переключающего блока, что снижает надежность системы. Цегаь изобретения - повышение точности слежения, устойчивости в широком диапазоне скоростей и надежности работы Эта цель достигается тем, что в следящий электропривод, содержащий датчик и приемник углового положения, кинематически связанный через редуктор с исполнительным двигателем, введены последовательно соединенные выпрямитель, пороговое устройство и электронный ключ, выходом подключенный к двигателю, и последовательно соединенные детектор огибающей, формирователь импульсов, одновибратор, интегратор, выход которого соединен с инверсным входом порогового устройства, причем вход выпрямителя подключен к выходу приемника углового положения, а вход детектора огибающей - к выаюду датчика углового положения. На фиг. 1 представлена блок-схема следящего электропривода; на 2 временные диаграммы, поясняющие процесс; на фиг. 3 - то же, при увеличиваю щейся скорости. Следящий электропривод содержит датчик 1 и приемник 2 угпового положения, соединенные пинией связи, иапример сеяь синную пару в трансформаторном режиме, исполнитепьный эпектродвигатепь постоянного тока, кинематически связанный черюз редуктор 4 с приемником 2 угло вого положения, последовательно соединённые детектор огибакицей 5, формироватетш 6 импупьсов, одновибратор 7 и интегратор 8, выпрямитель 9, подключенный к выходу приемника 2 угпового положения, пороговое устройство 1О, управляющий вход 11 которого подключен к выходу выпрямителя 9, инверсный опорный вход 12 - к выходу интегратора 8, а выход - ко входу ключа 13, выход которого подключен к исполнительному электродвигателю 3 постоянного тока. Следящий привод работает следующим образом. Пульсируклций магнитный поток об , мотки возбуждения сельсин-датчика 1 индуцирует в лучах обмотки синхронизации ЭДС. fcyriax г fvv,ax cos(0(j - lao) COS (Qg 1- iao°), 5 ctTtcKx наибольшее действующее значение ЭДС, возникающее в луче обмотки синхронизации; угол поворота ротора датчика относительно нулевого положения. Линейная ЭДС, индуцируемая во втором и третьем лучах обмотки синхронизации сельсин-датчика 1, модулируется по закону 2,5 Ew,ax sin (alht t Lg), где h - скорость вращения ротора, об/ед. времени; начальное смещение ротора сельсин-датчика 1. Таким образом, огибающая линейной ЭДС несет информацию о скорости вращения ротора сельсин-датчика 1. Данный сигнал поступает на входы детектора огибающей 5, выполненного в виде последовательно соединенных двухполупёриодного выпрямителя и зарядной цепи (на схеме не показаны)- на выходе которого образуется пульсирующий сигнал, форма которого и частота соответствует огибающей линейной ЭДС, т.е. соответствует скорости вращения ротора сельсин-датчика 1. В обмотке возбуждения приемника 2 наводится выходная ЭДС промодулированная по закону 6 -максик альное значение вы, ходной ЭДС; -угол расеогласования между приемником н датчиком. мотки возбуждения, выпрямленное выпрямителем 9, поступает на управпяк ший вход 11 порогового устройства 10 . в виде импульсов, частотой следования 1ОО Гц и амплитудой, зависящей от угла рассогласования. При определенном угле рассогласования 9, на определенном уровне срабатывания порогового устройства 10, на -выходе последнего формируется серия импульсов, отпирающая ключ 13, который подает питающее напряжение на исполнительный двигатель 3 и доворачивает его ротор до согласованного положения. Врембнные диаграммы выходного сигнала выпрямителя пред- .ставлены на фиг. 2а, где вепичина ампли туды Eg дана при постоянном угле рас,согласования 6, а 6 и , - пороги срабатывания порогового устройства 10, на фиг. 26 и в показаны импульсы напряжения питания двигателя 3 - (аЬ, формируемые последовательно соединенными пороговым устройством 10 и ключом 13 из импульсов выпрямленного напряжения, поступающего с выпрямителя 9. Из временных диаграмм (фиг. 2) еледует, что при одном и томже угпе рассогласования 0 путем изменения порога срабатывания порогового устройства 10 можно изменить ширину импульсов напряжения питания исполнительного электродвигателя и мощность, развиваемую на его валу. С другой стороны, для увеличения скорости вращения вала исполнительного электродвигателя требуется уменьщение скважности импульсов напряжения, питанлцих электродвигатель 3, т.е. увеличение их длительности при постоянном периоде следования, что в свою очередь увеличиваети мощность на его валу, при постоянном моменте нагрузки. При выбранном способе формирования импупьсов управления электродвигателя 3 это возможно путем увеличения угла рассогласования 9 при увеличении скорости при постоянном пороге сравнения C cohst порогового устройства Ю, т.е. уве/шченйя амплитуды сигнала EQ, что приводит к .колебаниям угпа 9 в зависимости от ско рости слежения или - уменьшению динамической точности. Регупирование порога срабатывания порогового устройства 10 в зависимости от скорости привода |(v) позвопяет при неизменной амппитуде выходного сигнала приемника 2,. т.е. при неизменном угпе зависимости скважности импульсов питания эпектродвигатёпя 3 (дпитепьность импульсов питания) от скорости привода и прямой зависимости привода в соответствии с изменением его скорости. Данная функциональная связь обеспечивается путем формирования опорного напряжения, поступающего на инверсный опорный вход 12 порогового устройства ,10, в зависимости от скорости слеже,ния. Для этого на выходы детектора огибающей 5 поступает линейное напряжение с линии синхронной связи датчика 1 с приемником 2. Детектор огибающей 5 выполнен в виде последовательно соеди- ненныхдвухполупериодного выпрямителя , и зарядной цепи (на схеме не показаны) подключен ко входу формирователя 6. например порогового элемента, который импульсирующий сигнал с выхода детектора огибающей 5 преобразует в прямоугольные импульсы, частота следования которых равна частоте пульсации. Сформированный сигнал поступает на вход одновибратора 7 (например, задержанноо мультивибратора), на выходе которо ° формируются импуПьсы, нормирован ью по длительности (определенной хро ирукшей цепью одновибратора), с часто следования, равной частоте входного сигнала. Импульсы с выхода одновибратора7 поступают на вход интегратора 8, на выходе которого вырабатывается постоянное напряжение, уровень которого соответствует интегралу напряжения на входе з& период следования импульсов. Временные диаграммы описанного про увеличивающейся скорости приведены на фиг. 3, где UQ - пульсирующий сигнал на выходе детектора огибающей 5; ф - порог срабатывания формирователя;Dm - импульсы на выходе формирователя 6; Т .- период следования (Т Т, Т ... при V, /г Vj). UOQ - нормированные по длительности и амплитуде импульсы на выходе одновибратора (Тц const); Uu - напряжение на выходе интегратора (заштриховано) при увеличивающейся скорости. Опорное напряжение, величина которого пропорциональная скорости слежения, поступает на инверсный опорный вход 12 порогового устройства 1О. Пороговое устройство 10 выполнено на основе дифференциапьного усйпитепя с гпубокой положитепьной обратной связью, прямой вход которого является управляющим 11 входом порогового устройства 10, а к инверсному входу усипигеля через инвертор подключен опорный аход 12 порогового устрюйства. Таким эбразом, при изменении скорости опорное напряжение на инверсном входе диф ференциапьного усилителя меняется в обратной зависимости по отношению к скорости, что приводит к .уменьшению порогов срабатывания порогового устройства 1О при увеличении скорости привода. Конкретное испопнение порогового устройства 10 на схеме фиг. 1 не раскрыто и может иметь другие варианты. Пороговое устройство 10 вырабатывает прямоугольные импульсы, управляющие к;1ючом 13, который коммутирует цепь питания исполнительного электродвигателя 3, например якорную пепь двигателя постоянного тока, при этом длитель ность импульсов напряжения питания электродвигателя равна длительности импульсов управления, Которая определяется скоростью слежения. .Поскольку фронты выпрямленных сину соидальных сигналов на небольших участках, практически линейны, можно принять что пороговое устройство Ю управляется с выпрямителя 9 импульсами треуголь ной формы. Таким образом, осуществляется ШИрОТНО-импульсная модуляция пи- тания электродвигателя 3 импульсами, длительность которых зависит от скорости привода, при постоянной частоте следования f CS 1ОО Гц. С ростом длительности импульсов растет мощность на валу электродвигателя 3, что при постоянном моменте нагрузки обеспечивает пропорциональное возрастание скорости. На фиг. 2 представлены времен шш диаграммы, пояснякшие процесс ; а - сигнал, поступакяций на вход порогового устройства lOj 5 - управления двигателем при пониженной скорости приводи | - импульсы управления двигателем 3 при повышенной скорости привода, - порог срабатывания при скорое ти %. i, - порог срабатывания при скорости . - напряженке иатаиия двягатеет, при этс. Vj ; Уг 90 4 Изменением порога срабатыванию Е порогового устройства 1О в обратной зависимости по отношению к скорости привода обеспечивается регулируемая обратная связь, что позволяет обеспечить постоянство угла рассогласования при меняющейся в широком диапазоне скорости слежения, и следовательно повысить динамическую точность. Устойчивость системы обеспечивается выбором пределов изменения порога Е. Надежность предлагаемого электропривода -увеличивается путем исключения электромеханического переключающего и уменьшением количества проводНИКОЕ связи приемника с датчиком. Таким образом, включение в предлагаемый следящий электропривод последовательно соединенных детектора огибаю- щей входы которого подключены к линии связи датчика с приемником, формирователя, одновибратора и интегратора, а также выпрямителя, подключенного к вы- оду приемника, порогового устройства, управляющий вход которого подключен к выходу выпрямителя, инверсный опорный вход - к выходу интегратора, а выход через ключ - к исполнительному электродвигателю, позволяет повысить точность, устойчивость и надежность работы привода в широком диапазоне скоростей. Формула изобретения Следящий электропривод, содержащий датчик и приемник углового положения, кинематически связанный через редуктор с исполнительным двигателем, отличающийся тем, что, с целью повышения .точности спежения, устойчивости в широком диапазоне скоростей и недежности работы, в него введены последовательно соединенные выпрямитель, пороговое устройство и элэктронный ключ, выходом подключенный к двигателю, и последоватегаьно соединенные детектор огибающей, формирователь импульсов. одновибратор, интегратор, выход которого соединен с инверсным входом порогового устройства, причем вход выпрямителя подключен к выходу приемника углового положения, а вход детектора огибающей - к выходу датчика углового положения. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 433447, кп. G 11 В 5/00, 1974. 2.Авторское свидетепъство СССР № 318906, KI1. G 05 В 11/06, 1971 (прототип).
а Et
N
/
/
