(54) СПОСОБ ГАШЕНИЯ КОЛЕБАНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ гашения колебаний | 1978 |
|
SU763628A1 |
| Способ гашения колебаний сил упругости в приводе | 1981 |
|
SU953293A2 |
| Мост | 1982 |
|
SU1060741A1 |
| Устройство для активного демпфирования упругих колебаний элементов конструкции вращающегося объекта | 1983 |
|
SU1134927A1 |
| Управляемое устройство для гашения колебаний | 1990 |
|
SU1737184A1 |
| СПОСОБ ГАШЕНИЯ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2412388C2 |
| Динамический гаситель колебаний маятникового типа | 1985 |
|
SU1301948A1 |
| Способ определения обобщенных параметров колебаний конструкций по частотным характеристикам | 2020 |
|
RU2758152C1 |
| Амортизатор с автоматическим управлением | 1984 |
|
SU1229481A2 |
| СПОСОБ СНИЖЕНИЯ ВЕРОЯТНОСТИ РАЗРУШЕНИЯ СНАРЯДОВ РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ (РСЗО) В ПОЛЕТЕ, ОСНОВАННЫЙ НА СНИЖЕНИИ ВЛИЯНИЯ ФЛАТТЕРНЫХ КОЛЕБАНИЙ | 2009 |
|
RU2409801C2 |
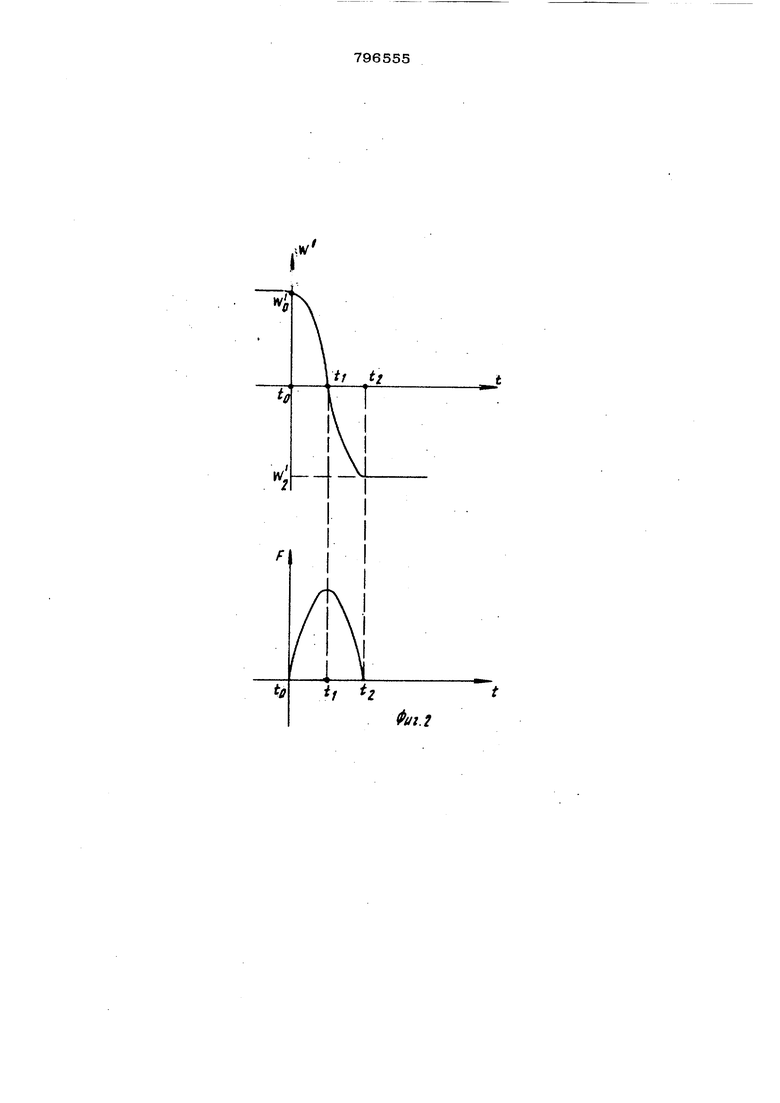
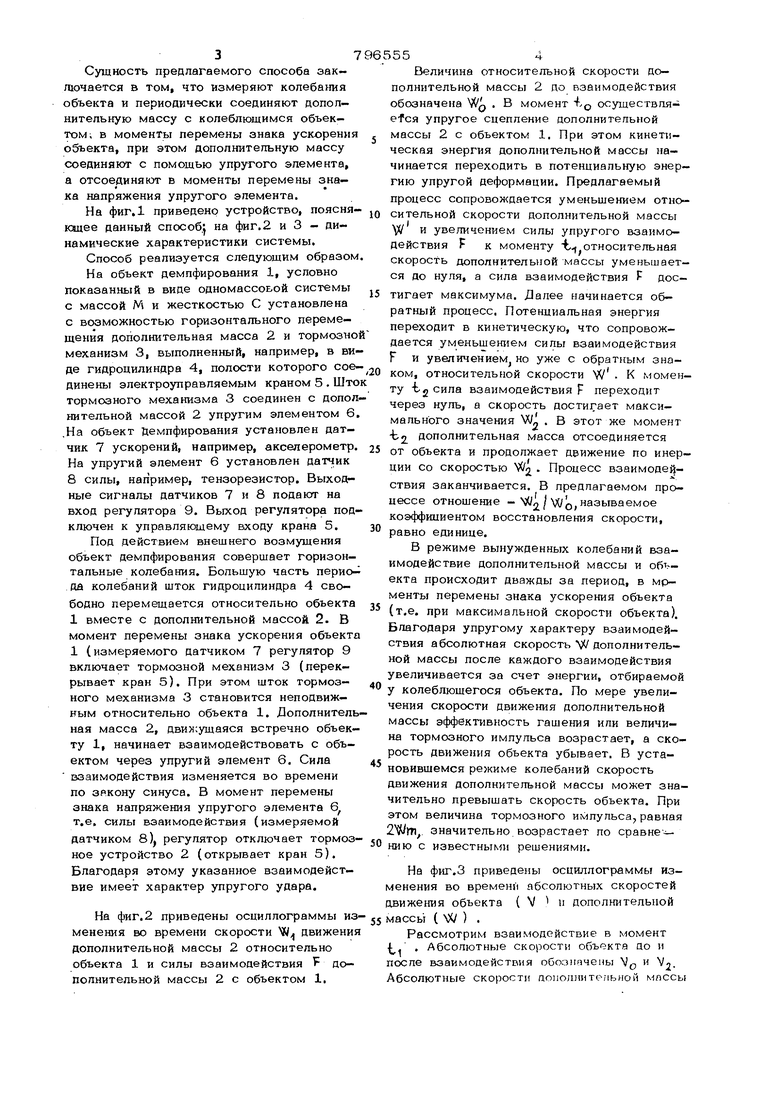
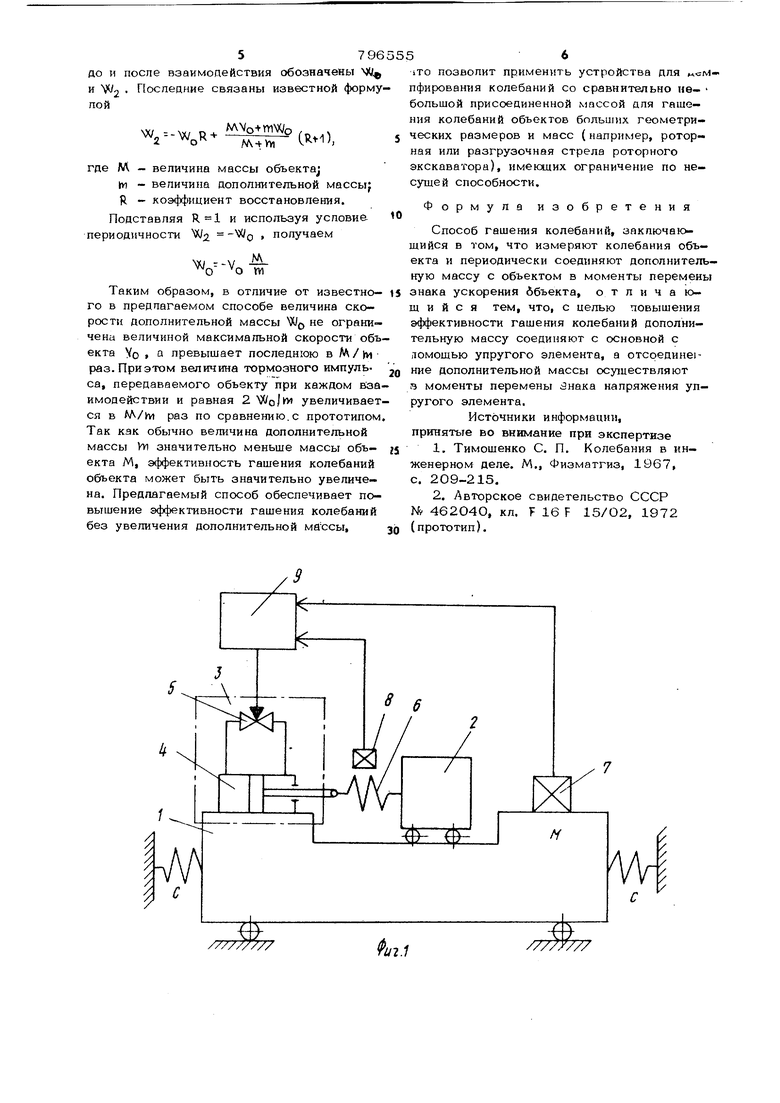
Изобретение относится к гашению колебаний в конструкциях и уменьшению неуравновешенных сил и может быть использовано дпя подавления колебаш1й конструкций, имеющих большую массу, например роторной стрелы экскаватора. Известен способ гашения колебаний, заключающийся в том, что Дополнительную массу упруго соединяют с объектом. При правильном выборе величины упругости удается полностью подавить колебания на частоте основного резонанса объекта Недостатком этого способа является узкий частотный диапазон. Наиболее близким к предлагаемому по технической сущности и достигаемому результату является способ гашения копелебаний| заключающийся в том, что измеряют колебания объекта и периодически соединяют дополнительную массу с колеблющимся объектом в моменты перемены знака ускорения объекта и отсоединяют после выравнивания скоростей объекта и дополнительной массы. В резутхьтате такого взаимодействия дополнительная масса приобретает скорость объекта и сохраняет ее в течение полупериода до следующего соединения, когда скорость объекта изменяет знак. При каждом взаимодействии (дважды за период колебаний) дополнительная масса передает объекту тормозно-й импульс силы, равный Vj, irvi , где VQ - максимальная скорость объекта; У - величина дополнительной массы i2) Недостатке этого способа является принципиальная невозможность увеличенния эффективности гашения,; т.е. увелвченяя тормозного импульса без увепвчения дополнительной массы. Цель изобрететщя - повышение эффективности гашения колебаний. Указанная цепь достигается тем, что Дополнительную массу соединяют с основной с помощью упругого элемента, а отсоединение дополнительной массы осуществляют в моменты перемены знака напряжения упругого элемента. Сущность предлагаемого способа заключается в том, что измеряют колебания объекта и периодически соединяют дополнительную массу с колеблющимся объектом; в моменты перемены знака ускорения объекта, при этом дополнительную массу соединяют с помощью упругого элемента, а отсоединяют в моменты перемены знака напряжения упругого элемента. На фиг.1 приведено устройство, поясня кщее данный способ.} на фиг. 2 и 3 - динамические характеристики системы. Способ реализуется следующим образом На объект демпфирования 1, условно показанный в виде одномассоьой системы с массой М и жесткостью С установлена с возможностью горизонтального перемещения дополнительная масса 2 и тормозно механизм 3, выполненный, например, в ви де гидроцилиндра 4, полости которого сое динены электроуправляемым краном 5 . Што тормозного механизма 3 соединен с допол нительной массой 2 упругим элементом 6 .На объект Демпфирования установлен датчик 7 ускорений, например, акселерометр На упругий элемент 6 установлен датчик 8 силы, например, тензорезистор. Выходные сигналы датчиков 7 и 8 подают на вход регулятора 9. Выход регулятора под ключен к управляющему входу крана 5. Под действием внешнего возмущения объект демпфирования совершает горизонтальные колебания. Большую часть периода колебаний шток гидроцилиндра 4 свободно перемещается относительно объекта 1 вместе с дополнительной массой 2. В момент перемены знака ускорения объект 1 (измеряемого датчиком 7 регулятор 9 включает тормозной механизм 3 (перекрывает кран 5). При этом шток тормозного механизма 3 становится неподвижным относительно объекта 1. Дополнитель ная масса 2, двиисущаяся встречно объекту 1, начинает взаимодействовать с объектом через упругий элемент 6. Сипа взаимодействия изменяется во времени по зркону синуса. В момент перемены знака напряжения упругого элемента 6, т.е. силы взаимодействия (измеряемой i «т:; v tayiJDi очэпп jt он я notvicrijji iviv-л ч датчиком 8), регулятор отключает тормоз „. ное устройство 2 (открывает кран 5J. Благодаря этому указанное взаимодействие имеет характер упругого удара. На фиг.2 приведены осциллограммы из менения во времени скорости У движени дополнительной массы 2 относительно объекта 1 и силы взаимодействия дополнительной массы 2 с объектом 1, 4еличина относительной скорости дополнительной массы 2 до взаимодействия обозначена WQ . В момент осуществляefoя упругое сцепление дополнительной MaccbF 2 с объектом 1. При этом кинетическая энергия дополнительной массы начинается переходить в потенциальную энергию упругой деформации. Предлагаемый процесс сопровождается уменьшением относительной скорости дополнительной массы W и увеличением силы упругого взаимодействия F к моменту Ь относительная скорость дополнительной массы уменьшается до нуля, а сила взаимодействия F достигает максимума. Далее начинается обратный процесс, Потенциальная энергия переходит в кинетическую, что сопровождается уменьшением силы взаимодействия Г и увеличением но уже с обратным знаком, относительной скорости W . К моменту -Ь 2 сипа взаимодействия F переходит через нупь, а скорость достигает максимального значения W . В этот же момент -fc2 дополнительная масса отсоединяется от объекта и продолжает движение по инерции со скоростью NX/2 . Процесс взаимодействия заканчивается. В предлагаемом процессе отношение - (/2/NX/д, называемое коэффициентом восстановления скорости. равно единице. В режиме вынужденных колебаний взаимодействие дополнительной массы и объекта происходит дважды за период, в мрменты перемены знака ускорения объекта (т.е. при максимальной скорости объекта). Благодаря упругому характеру взаимодействия абсолютная скорость V/ дополнительной массы после каждого взаимодействия увеличивается за счет энергии, отбираемой у колеблющегося объекта. По мере увеличения скорости движения дополнительной массы эффективность гашения или величина тормозного импульса возрастает, а скорость движения объекта убывает. В установившемся режиме колебаний скорость движения дополнительной массы может значительно превышать скорость объекта. При этом величина тормозного импульса, равная /W171. значительно возрастает по сравне-- , ниюс известными решениями. На фиг.З приведены осциллограммы изменения во времени абсолютных скоростей движения объекта ( V MI дополнительной массы ( ХУ ) . Рассмотрим взаимодействие в момент . Абсолютные скорости объекта до и после взаимодействия обозначены V и V2. Абсолютные скорости доноплятельной мпссы
57965556
до и после взаимодействия обозначены Л JTO позволит применить устройства для лсми . Последние связаны известной форму- пфирования колебаний со сравнительно не- /A-v-Wi где АЛ - величина массы o6beKTaj IM - величина дополнительной массы| Я - коэффициент восстановпения. Подставляя и используя условие периодичности W получаем Таким образом, в отличие от известного в предлагаемом способе величина скорости дополнительной массы WQ не ограничена величиной максимальной скорости объекта УО , а превышает последнюю в М / hi раз.Приэтом величина тормозного импульса, передаваемого объекту при каждом вза- имодействии и равная 2 Wo/W увеличивает ся в ДЛ/Ы раз по сравнению.с прототипом Так как обычно величина дополнительной массы Ун значительно меньше массы объекта М, эффективность гашения колебаний объекта может быть значительно увеличена. Предлагаемый способ обеспечивает повышение эффективности гашения колебаний без увеличения дополнительной массы. большой присоединенной массой для гашения колебаний объектов больших геометри- ческих размеров и масс (например, роторная или разгрузочная стрела роторного экскаватора), имеющих ограничение по несущей способности. Формула изобретения Способ гащения колебаний, заключающийся в том, что измеряют колебания объекта и периодически соединяют дополнительную массу с объектом в моменты перемены знака ускорения ббьекта, отличающ и и с я тем, что, с целью повышения эффективности гашения колебаний дополнительную массу соединяют с основной с ломошью упругого элемента, а отсредине ние дополнительной массы осуществляют 3 моменты перемены йнака напряжения упругого элемента. Источники информации, принятые во внимание при экспертизе 1.Тимощенко С, П, Колебания в инженерном деле, М,, Физматгиз, 1967, с, 209-215, 2,Авторское свидетельство СССР № 462О4О, кл. F 16 F 15/О2, 1972 (прототип).
U/ .
rWj.
Ы if гt
IФаг. 2
