Изобретение относится к способам гашения колебаний машин и механизмов .
. Известен способ гашения колебаний сил упругости в приводе, заключающийся в том, что в системе изменяют параметр, влияющий на силу упругости трансмиссии ведомого вала привода в зависимости от его скорости l.
Недостатком способа является невозможность уменьшения амплитуд колебаний внутри диапазона ограничения, а также невозможность ограничения статической составляющей сил упругости.
По основному авт.св. 750175 известен способ гашения колебаний сил упругости в приводе заключающийся в том, что измеряют скорость вращения ведомого вала привода и пропорционально ей задают скорость холостого хода движения, являющуюся параметром, влияющим на силу упругости трансмиссии 2.
Недостатком способа является наличие значительных динамических нагрузок в приводе, обусловленных недостаточно быстрым гашением колебаний сил упругости.
Целью изобретения является снижение динамических нагрузок,в приводе.
5 Указанная цель достигается тем, что согласно способу дополнительно измеряют ускорение ведомого вала и при превышении абсолютного значения заданной величины ускорения дают скорость холойтого хода двигателя пропорционально ус; орению ведомого вала.
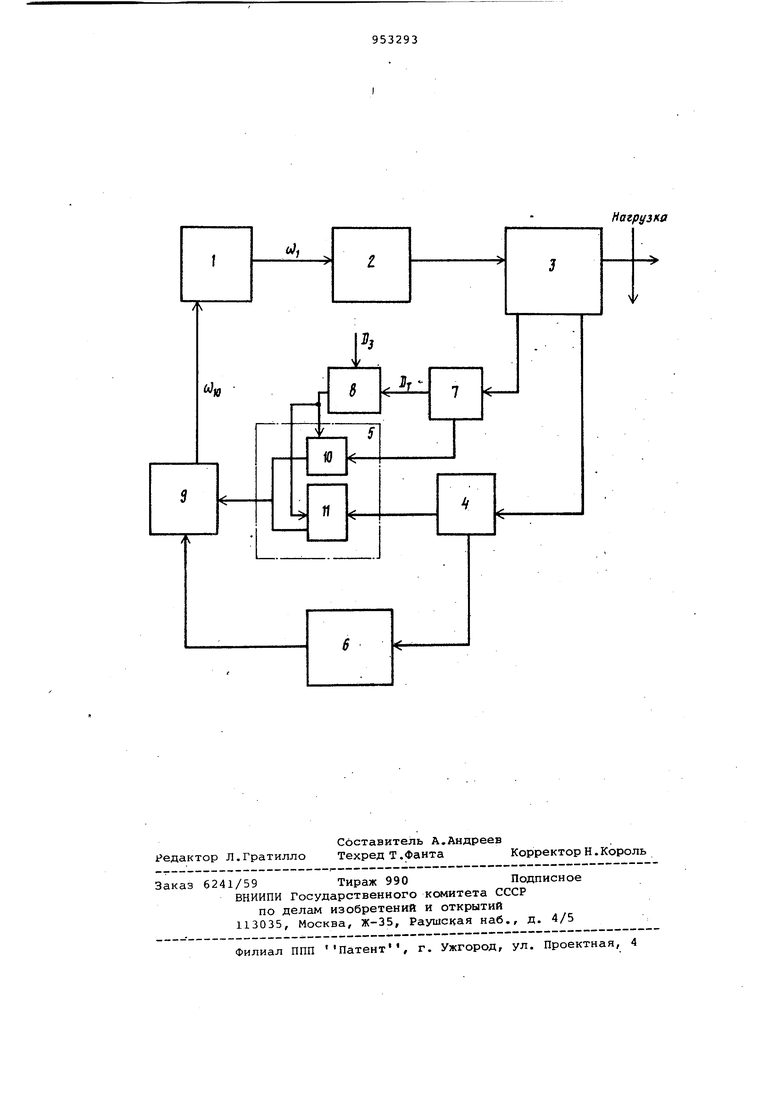
На чертеже показана структурная схема устройства, в котором реализован предложенный способ гашения
15 колебаний сил упругости в приводе. Двигатель 1 посредством трансмиссии ,2 связан с ведомым валом 3 привода, воспринимающим нагрузку и снабженным датчиком 4 угловой
20 скорости, сигнал с которого подается на блок 5 перемены задания и корректирующее устройство 6 и датчиксмл 7 ускорения, сигнал с которого подается на пороговый блок 8 и на блок 5 перемены задания, сигнал с 1 оторого
25 поступает на регулятор 9 скорости вращения двигателя. Блок 5, перемены задания может содержать ключи 10 и 11 управляемые сигналом с порогового блока 8. Входы ключей 10 и 11
связаны с выходами датчиков 4 скороти и датчика 7 ускорения, а выходы ,с регулятором 9 скорости нращения двигателя 1.
При реализации способа измеряют датчиком 7 ускорения текущее знаЧение ускорения D-p ведомого вала 3 привода, поступающее на вход блока 5 перемены задания на вход порогового блока 8, который срабатывает только при превышении абсолютного значения ускорения Dj. Пока пороговый блок 8 не срабатывает и блок 5 перемены задания пропускает сигнал с датчика 4 скорости (ключ И замкнут) и не пропускает сигнал с датчика 7 ускорения (ключ 10 разомкнут) . В этот момент задания скорост
холостого хода двигателя W осуществивляют по соотношению
W,O KW+UK,(1)
где W - угловая скорость вращения
ведомого вала 3;
К - коэффициент пропорциональности;
и - сигнал коррекции, определяемый параметрами привода.
Резкое изменение нагрузки на ведомом валу 3 привода влечет за собо увеличение абсолютного значения ускорения выходного вала D, при превышении которого заданного значения DJ происходит срабатывание порогового блока 8 и блок 5 перемены задания подключает к регулятору 9 скорости датчик 7 ускорения и отключает датчик 4 скорости (ключ LO замкнут, ключ 11 разомкнут).
В режиме срабатывания порогового блока 8 скорость холостого хода двигателя задают пропорционально ускорению ведомого вала привода D-j- по соотношению
0 ,(2)
где а - постоянная, определяемая
возможностями двигателя Ц и степенью снижения величины перегрузок.
Такое задание скорости холостого хода двигателя позволяет при резком изменении скорости выходного вала 3 привода формировать процесс управления двигателем 1 и уменьшить динамические нагрузки в приводе.
Так при резком уменьшении скорости вращения выходного вала 3, возникающим в результате резкого наброса нагрузки (например, встреча исполнительного органа с жестким препятствием) , ускорения D ведомого вала 3 привода будет отрицательным и при D, согласно соотношению (2), произойдет быстрый перевод двигателя 1 в режим экстренного торможения.
Резкое увеличение скорости вращения ведомого вала 3, возникающее при быстром уменьшении нагрузки в результате реализации потенциальной энергии, накопленной в упругих элементах трансмиссии 2, или при
0 появлении активной нагрузки на исполнительном органе, привод к увеличению положительного ускорения D и при Ц, Dj осуществляет форсированный разгон двигателя 1.
5 Таким образом, задание скорости холостого хода двигателя W пропорционально ускорению ведомого вала 3 привода позволяет производить эффективное гашение колебаний сил
0 упругости в приводе и снизить динамические нагрузки в приводе при резком изменении нагрузки.
Если . в процессе управления двигателем 1 возникает момент, когда
г , то задание скорости холостого хода , осуществляется по соотношению (1) и производится более плавное управление двигателем 1, обеспечивающее гашение колебаний сил упругости в приводе при малых изменениях нагрузки на ведомом валу 3 привода.
Применение предлагаемого изобретения позволяет повысить эффективность снижения динамических, нагрузок в приводе, повышает долговечность и надежность машин, работающих при резкопеременном характере нагрузок.
Формула изобретения
Способ гашения колебаний сил упругости в приводе по авт.св. № 750175, отличающийся тем, что,
с целью снижения динамических нагрузок в приводе, дополнительно измеряют ускорение ведомого вала и при превышении абсолютного значения заданной величины ускорения задают
скорость холостого хода двигателя пропорционально ускорению ведомого вала.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР 168965, кл. F 01 D 17/10, 1965.
2.Авторское свидетельство СССР № 750175, кл. F 16 F15/02, 1977
(прототип).
О/,
Нагрузка
-
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ гашения колебаний сил упругости в приводе | 1977 |
|
SU750175A1 |
| СИСТЕМА СТАРТЕР-ГЕНЕРАТОР ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2012 |
|
RU2510796C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ УСИЛИЕМ ПЕРЕКЛЮЧЕНИЯ СКОРОСТЕЙ В АВТОМАТИЗИРОВАННОЙ МЕХАНИЧЕСКОЙ ТРАНСМИССИИ | 1994 |
|
RU2101199C1 |
| Способ диагностирования предельных искривлений конвейерного става струговой установки в плоскости пласта | 1983 |
|
SU1348513A1 |
| Способ диагностического мониторинга упругого момента шпинделя толстолистового прокатного стана | 2024 |
|
RU2830788C1 |
| Механическая трансмиссия с системой автоматического управления распределением крутящих моментов между колесами автотранспортного средства (4к4) с отключаемым приводом одного из ведущих мостов | 2019 |
|
RU2706681C1 |
| Привод рабочего органа землеройной машины | 1983 |
|
SU1129300A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГАШЕНИЕМ КОЛЕБАНИЙ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2412839C2 |
| СПОСОБ СНИЖЕНИЯ ДАВЛЕНИЯ ВО ВПУСКНОМ КОЛЛЕКТОРЕ ДВИГАТЕЛЯ (ВАРИАНТЫ) | 2015 |
|
RU2693369C2 |
| Автоматический стенд для испытаний трансмиссий | 1987 |
|
SU1460640A1 |
OJ,
Jr
