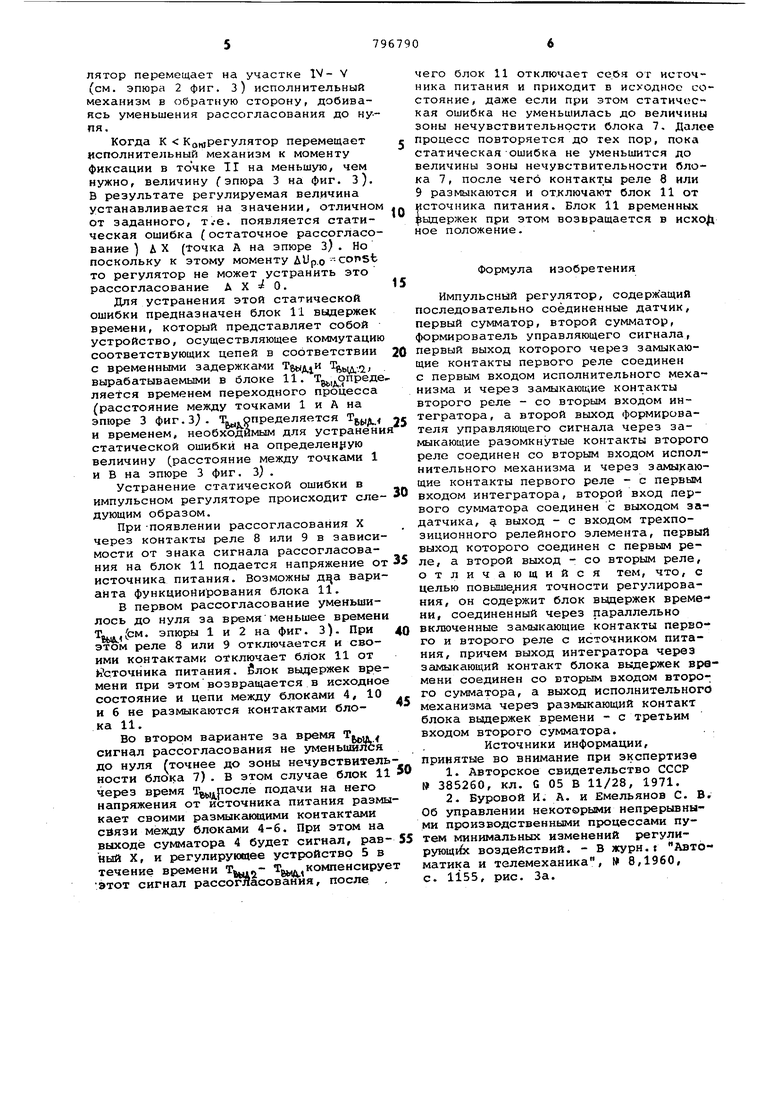
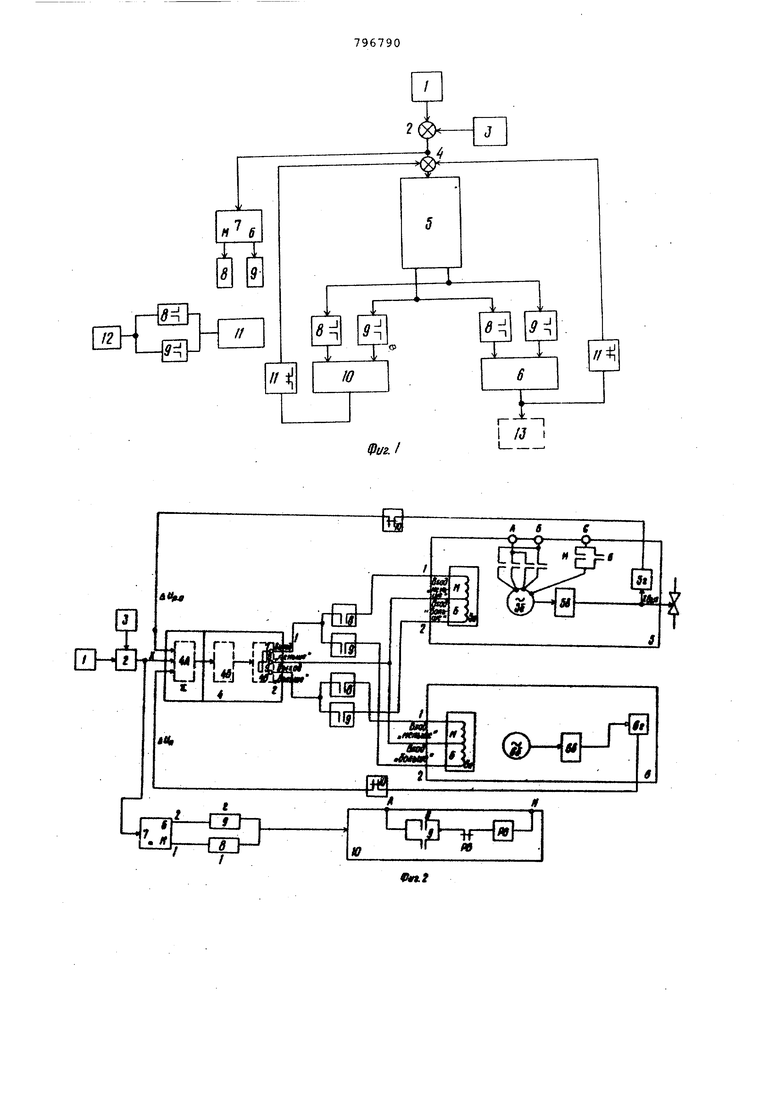
сумматор 4, формирователь управляюще го сигнала 5, исполнительный механизм б, трехпозиционный р елейный эле мент 7, первое 8 и второе 9 реле, ин хегратор 10, блок 11 вьщержек времени, источник 12 питания и объект 13 {регулирования. Импульсный регулятор реализует сл дукадий закон регулирования; при X О ), dx 5 БЫХа о при X о 5 где Х - отклонение регулируемой вели чины от заданного значения (рассогла сование)} Xg,- изменение регулирующе го воздействия (в частности, перемещение регулирующего органа ; К - к эффициент усиления регулятора. ПРИ этом производная dx/dt сигнала рассогласования в процессе работы ре гулятора непосредственно не вычисляется. Импульсный регулятор работает сле дующим образом. При появлении рассогласования и увеличении его до величины зоны нечувствительности блока 7 последний, зависимости от знака рассогласования включает реле 8 или 9. Соответствующее реле остается включенным до тех пор, пока { ассогласование не станет vieHbme зоны нечувствительности блока 7, после чего реле отключается. На выходе., сумматора 4 формируется сигнал равный X - U Up.Q где л IJ - сигнал обратной связи по ° положению исполнительного механизма; и - сигнал обратной связи с ин тегратора. Пусть для определенности при появ лении рассогласования X в момент вре мени 1 (см. фиг. 3) сработало реле 8 и появилось напряжение на первом выходе формирователя управляющего сигнала, представляющего собой трехпози ционный элемент. Это напряжение чере контакты реле 8. воздействует на испо нительный механизм (закрывает eroj , так как регулятор стремится поддержи вать на входе формирователя 5 соотно шение X - Дир.5 + ли„ 0. Но, так как при этом напряжение на втором выходе блока 5 отсутствует, то величина uUu остается неизменной. Процессам, происходящим при этом в импульсном регу ляторе, соответствуют эпюры напряжения между линиями Т и II (фиг. 3) . Поскольку регулятдр перемещает исполнительный механизм в сторону устранения рассогласования, то через некоторое время рост сигнала рассогласования прекратиться (точка 1Г на фиг.З) а затем величина сигнала рассогласова ния начне-т уменьшаться. Таким образом, на участке i-II (фиг. 3) реализуется закон регулирования Xgj,,) КХ. В момент времени, следующий за точкой II (фиг. 3), сигнал на выходе сумматора 4 изменяет знак. При этом на первом выходе формирователя 5 сигнал исчезает, а на втором появляется, В результате выходной сигнал исполнительного механизма остается постоянным, а выходной сигнал интегратора изменяется, компенсируя на сумматоре 4 изменяющийся в соответствии с переходным процессом сигнал рассогласования. На участке Т1-1Г1 (фиг. 3) реализуется закон регулирования 0. Когда рассогласование X уменьшается до величины зоны нечувствительности устройства 7, на реле 8 исчезает напряжение, и оно отключает цепи, соединяющие выходы формирователя 5 с входами исполнительного механизма 6 и интегратора 10 (момент 111 на фиг. З). Регулятор приходит в исходное состояние. Единственной настройкой регулятора является его коэффициент усиления К, который определяется соотношением величин сигналов рассогласования X и жесткой обратной связч по регулирующему воздействию (положению регулирующего органа). Для увеличения К необходимо, чтобы при той же величине сигнала рассогласования. X регулирующий орган перемещался на большую величину. Для этого нужно уменьшить крутизну скорость изменения) сигнала ALIp.o (т.е. на единицу перемещения регулирующего органа сигнал ДЦр.о должен изменяться на меньшую величину). Для уменьшения К необходимо, наоборот, увеличить крутизну сигнала. Характер работы регулятора зависит от того, каким выбран его коэффициент усиления К. При правильном выборе К регулятор перемещает исполнительный механизм б за время I-I1 на величину, которая обеспечивает последующее уменьшение рассогласования до нуля. Характер работы регулятора при правильно выбра.нном К Кр представлен на эпюре 1 (фиг. З) . Когда К регулятор перемещает исполнительный механизм к моменту фиксации в точке 1Г на большую, чем это нужно, величину (участок 1-1I на эпюре 2). В результате происходит перерегулирование. В этом случае устройство 7 включает другое реле (в данном случае реле 9) и регулятор перемещает на участке IV- V (см. эпюра 2 фиг. З) исполнительный механизм в обратную сторону, добиваясь уменьшения рассогласования до ну-пя. Когда К Ко регулятор перемещает исполнительный механизм к моменту фиксации в точке II на меньшую, чем нужно, величину fэпюра 3 на фиг. З). В результате регулируемая величина устанавливается на значении, отличном от заданного, т.-е. появляется статическая ошибка (остаточное рассогласование ) А X (точка А на эпюре З). Но поскольку к этому моменту AUp. const то регулятор не может устранить это рассогласование А X 0. Для устранения этой статической ошибки предназначен блок 11 вьвдержек времени, который представляет собой устройство, осуществляющее коммутацию соответствующих цепей в соответствии с временными задержками . вырабатываемыми в блоке 11. Т | опреде ляется временем переходного процесса (расстояние между точками 1 и А на эпюре 3 фиг.З. Т..определяется и временем, необходимым для устранени статической ошибки на определенную величину (расстояние между точками 1 и В на эпюре 3 фиг. З) . Устранение статической ошибки в импульсном регуляторе происходит еле дующим образом. При -появлении рассогласования X через контакты реле 8 или 9 в зависимости от знака сигнала рассогласования на блок 11 подается напряжение от источника питания. Возможны варианта функционирования блока 11. В первом рассогласование уменьшилось до нуля за времяменьшее времени ,(cM. эпюры 1 и 2 на фиг. З). При этом реле 8 или 9 отключается и своими контактами отключает блок 11 от Ьсточника питания, йлок выдержек времени при этом возвращается в исходное состояние и цепи между блоками 4, 10 и б не размыкаются контактами блока 11. Во втором варианте за время Т. сигнал рассогласования не 1еньцшлся до нуля (точнее до зоны нечувствитель ности блока 7). В этом случае блок 11 через время Т д после подачи на него напряжения от источника питания размы кает своими размыкакицими контактами сдязи между блоками 4-6. При этом на выходе сумматора 4 будет сигнал, разный X, и регулирующее устройство 5 в течение времени .- Т,компенсируе этот сигнал рассогласования, после чего блок 11 отключает себя от источника питания и приходит в исходное состояние, даже если при этом статическая ошибка НС уменьшилась до величины зоны нечувствительности блока 7. Далее процесс повторяется до тех пор, пока статическая ошибка не уменьшится до величины зоны нечувствительности блока 7, после чего контактны реле 8 или 9 размыкаются и отключают блок 11 от Источника питания. Блок 11 временных ыдержек при этом возвращается в исхоЬ ное положение. . Формула изобретения Импульсньай регулятор, содержащий последовательно соединенные датчик, первый сумматор, второй сумматор, формирователь управляющего сигнала, первый выход которого через замыкающие контакты первого реле соединен с первым входом исполнительного механизма и через замыкающие контакты второго реле - со вторым входом интегратора , а второй выход формирователя управляющего сигнала через замыкающие разомкнутые контакты второго реле соединен со вторым входом исполнительного механизма и через замыкающие контакты первого реле - с первым входом интегратора, второй вход первого сумматора соединен с выходом задатчика, выход - с входом трехпозиционного релейного элемента, первый выход которого соединен с первым реле, а второй выход - со вторым реле, отличающийся тем, что, с целью повыше,ния точности регулирования, он содержит блок выдержек време- ни, соединенный через параллельно включенные замыкающие контакты первого и второго реле с источником питания, причем выход интегратора через замыкающий контакт блока выдержек времени соединен со вторым входом второго сукп атора, а выход исполнительного механизма через размыкающий контакт блока выдержек времени - с третьим входом второго сумматора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 385260, кл. G 05 В 11/28, 1971. 2.Буровой И. А. и Емельянов С. В. Об управлении некоторыми непрерывными производственными процессами путем минимальных изменений регулирующ1б{ воздействий. - В журн.: Автоматика и телемеханика, 8,1960, с. 1155, рис. За.
Фиг. I

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом тормоза шахтной подъемной машины | 1988 |
|
SU1680614A1 |
| Импульсный регулятор | 1984 |
|
SU1238025A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2391691C1 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ОГРАНИЧЕНИЯ МОЩНОСТИ ТУРБОГЕНЕРАТОРА | 1971 |
|
SU436325A1 |
| Устройство для регулирования скорости электродвигателя постоянного тока | 1976 |
|
SU655049A2 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1988 |
|
RU2012034C1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1998 |
|
RU2120655C1 |
| Релейно-импульсный регулятор | 1983 |
|
SU1674058A1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| Импульсное регулирующее устройство | 1983 |
|
SU1151926A1 |
л s е - -9-О-- ста.
