(54) СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ ДВИГАТЕЛЯ
образователь 11/ второй цйфроаналоговый преобразователь 12.
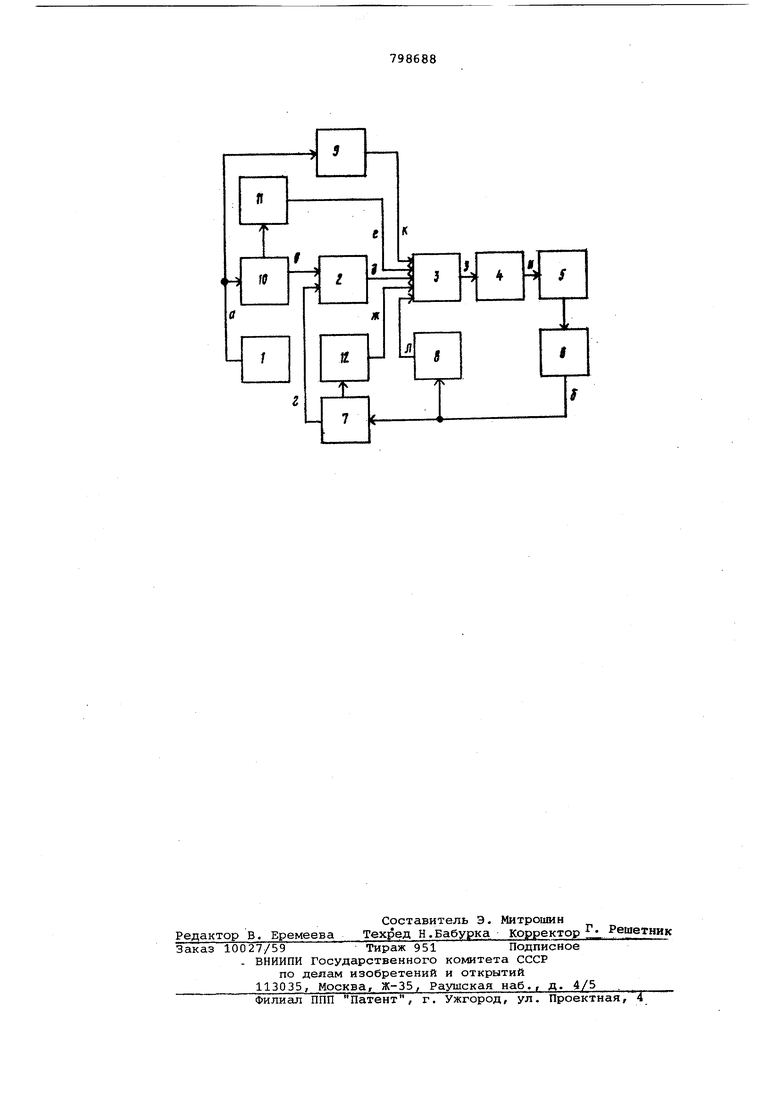
Выход генератора 1 через корректирующий блок 9 и через последователно соединенные дополнительный делитель 10 частоты и фазовый детектор 2 подключен суммирующим к входам суммирунэдего устройства 3. Выход тахогенератора б через частотный детектор 8 подключен к вычитающему входу суммирующего устройства 3, а через делитель 7 частоты ко второму входу фазового детектора 2. Вторые выходы делителей 10 и 7 частоты через цифроаналоговые преобразователи 11 и 12 соответственно, подключены к вычитающему и суммирунздему входам суммирующего устройства 3, выход которого через последовательно соединенные усилитель-преобразователь 4 и двигатель 5 подключен ко входу тахогенератора б.
Система работает следующим образом.
При запуске двигателя 5 и в переходных режимах, когда скорость вращения двигателя 5 значительно отличается от номинсшьной, основные управляющие воздействия создают корректирукндий блок 9 и частотный детектор 8. Эти воздействия представляют сигналы постоянного тока К,Л полученные в результате сглаживания сигналов М, Н, пропорциональных частотам импульсов сигналов о,d . Сигнал Л вычитается из сигнала К и разност устанавливает скорость вращения двигтеля 5, отличающуюся от заданной на величину статической ошибки регулирования. Затем вступают в работу фазовый детектор 2 и цифроаналоговый преобразователи 11 и 12. в суммирующем устройстве 3 :-сигналы д, ж суммируются, а из суммы вычитывается сигнал е . В резулЫ:ате формируется сигнал 3, который сглаживаясь и усиливаясь в усилителе-преобразователе 4, преобразуется в сигнал постоянного тока и. Этот сигнал обеспечивает астатическое регулирование скорости вращения двигателя 5, т.е. такое регулирование, когда скорость вращения двигателя равна заданной, а разность между сигналами к,лстановитс}| равной нулю. С целью измег ения скорости вращения, двигателя 5 изменяют частоту задающего генератора 1, что вызывает пропорциональное изменение сигнала к. Появляющаяся разность медлу сигналами к,л изменяет скорость вращения двигателя 5 до тех пор, пока скорость вращения двигател
5 не будет отличаться от заданной на величину статической ошибки регулирования. Затем вступают в работу фа.зовый детектор 2 и цифроаналоговый преобразователи 11 и 12, которые изменяют скорость вращения двигателя 5 до тех пор, пока .она не станет равной заданной скорости. Пропорционально изменению частоты сигнала g задающего генератора, изменяются частоты сигнала b дополнительного делителя 10 частоты/ сигнала g фазового детектора 2/ сигнала з суммирующего устройства 3, сигнала S тахогенератора б, сигнала г делителя 7 частоты.
э Благодаря наличию дополнительного делителя 10 частоты цифроаналоговых преобразователей 11 и 12, вклю. ченных согласно описанию системы, пульсации в сигнале з выше по частоте в п раз, а размах этих пульсаций меньше в п раз, .чем в сигнале g .Поэтому процент пульсаций в сигнале и уменьшается в h раз, по сравнению с сигналом в известном, что дает возможность регулировать частоту задающего генератора с сохранением астатизма регулирования скорости вращения двигателя в п больших пределах, чем в системе по основному изобретению.
Формула изобретения
Система автоматического регулирования скорости вращения двигателя
- по авт. св. № 446023, о т л и ч а ющ а я с я тем, что с целью увеличения точности системы, она содержит дополнительный делитель частоты и два цифроаналоговых преобразователя, вход первого из которых подключен к первому выходу дополнительного делителя частоты, вход-второго - к . второму выходу делителя частоты, а выходы - к соответствующим входам сумматора/ второй выход дополнительного делителя частоты соединен с соответствующим выходом фазового детектора, а вход- - с выходом задающего генератора.
Источники информации,
Q принятые во внимание при экспертизе 1. Батоврин А. А. и др. Цифровые системы управления приводами. Л./ Энергия, 1977, с. 17.
2.Киселев В.М. Фазовые системы чис-
лового программного управления стенками, М., Машиностроением, 1966, с.214.
3. Авторское свидетельство СССР № 446023, кл. G 05 В 11/(;гО,1973 прототип .
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования скорости вращения двигателя | 1981 |
|
SU1032424A1 |
| Вентильный электропривод постоянного тока | 1989 |
|
SU1676055A1 |
| Устройство для программного управления электроприводом | 1980 |
|
SU1198458A1 |
| Система регулирования частоты вращения двигателя | 1985 |
|
SU1262448A1 |
| Система автоматического регулирования скорости вращения двигателя | 1972 |
|
SU446023A1 |
| Электропривод с синхронным двигателем | 1972 |
|
SU518851A1 |
| Устройство для компенсации эксцентриситета прокатных валков | 1981 |
|
SU990357A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1987 |
|
SU1508332A1 |
| Устройство для автоматического регулирования скорости перемещения магнитной ленты | 1975 |
|
SU533977A1 |
| Устройство для частотно-фазового регулирования скорости движения магнитной ленты | 1979 |
|
SU858090A1 |