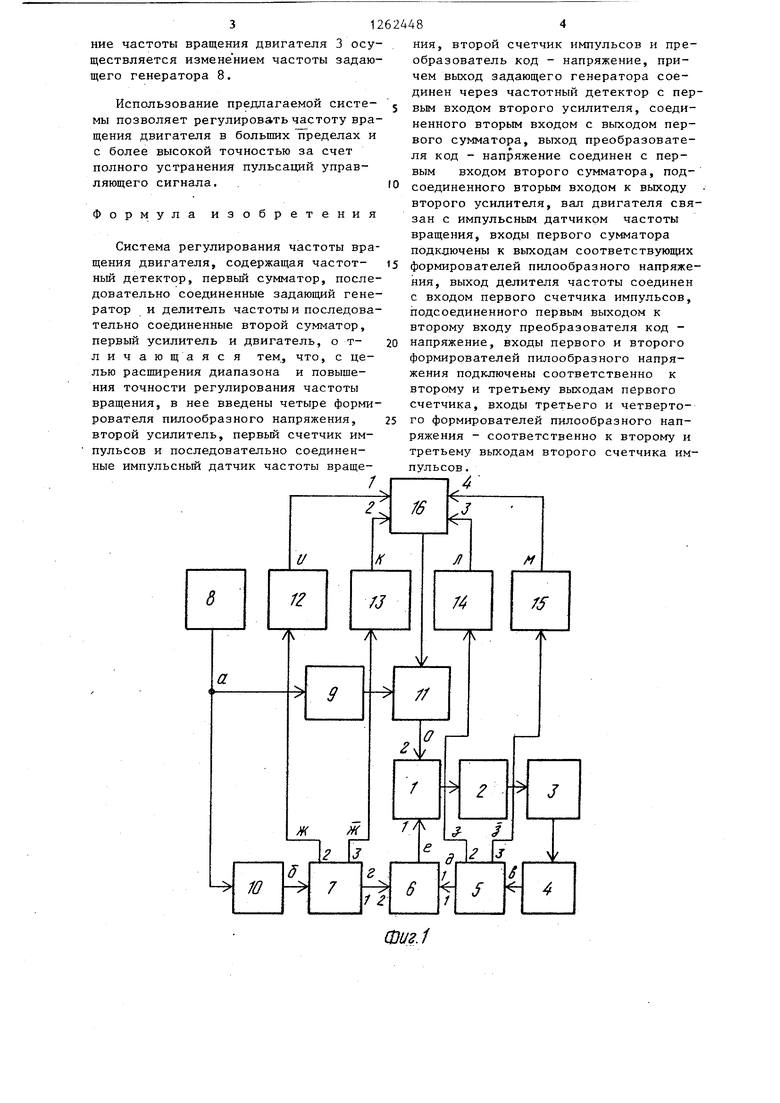
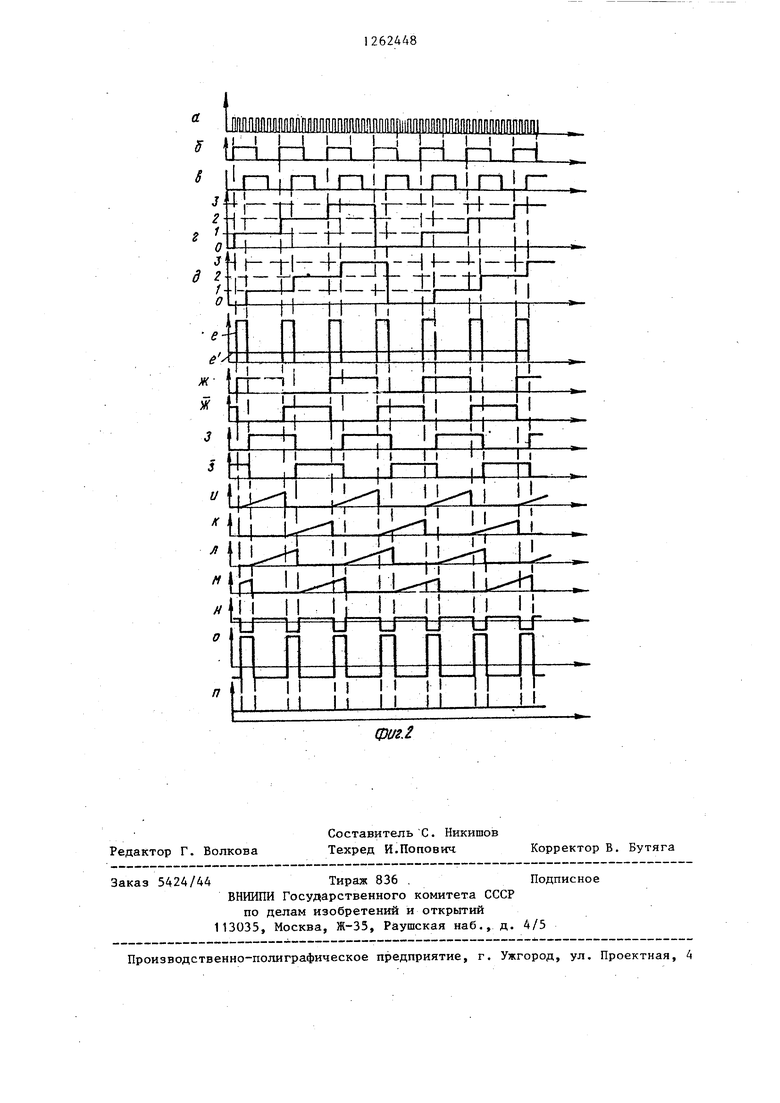
1 Изобретение относится к системам автоматического управления, в частности к системам регулирования часто ты вращения двигателей. Целью изобретения является расширение диапазона и повышение точности регулирования частоты вращения. На фиг. 1 представлена блок-схема системы; на фиг. 2 - временные диаграммы, поясняющие работу системы Система содержит сумматор 1, усилитель 2, двигатель 3, импульсньш датчик 4 частоты вращения, счетчик 5 импульсов, преобразователь 6 коднапряжение, счетчик 7 импульсов, задающий генератор 8, частотный детектор 9, делитель 10 частоты, усили тель 11, первый 12, второй 13, трети 14 и четвертый 15 формирователи пило образного напряжения, сумматор 16. На фиг, 2 обозначено: а - сигнал на выходе задающего генератора 8; сигнал на выходе делителя частоты; о сигнал на выходе импульсного датчика 4 частоты вращения; 2,9числа на первых выходах счетчиков 7 и 5 импульсов; е - сигнал на выходе преобразователя 6 код - напряжение; е - постоянная составляющая сигнала е (ее площадь равна площади импульсов сигнала е , поэтому она про порциональна усредненной по времени разности числе г. и9 ), - прямой и инверсный сигналы на втором и третьем выходах счетчика 7 импульсов имеющие частоту в два раза ниже частоты сигнала S ; -я , ч - прямой и ин версный сигналы на втором и третьем выходах счетчика 5 импульсов, имеюпщ частоту в два раза ниже частоты сигнала f);u5K,rt,M,H- сигналы на первом, втором, третьем и четвертом входах и выходе сумматора 16; осигнал на втором входе сумматора 1, не имеюш 1й постоянной составляющей, так как площади импульсов вьш1е и ниже оси абсцисс равны между собой, и имеющий одинаковые с сигналом е пере менные составляющие, так как длитель ность и размах импульсов у этих сигналов одинаковы; U - сигнал на выходе сумматора 1, определяемый как разность,сигналов е и о и поэтому т.е. п . равньй е Система работает следующим образом. Сигнал о-,пройдя ;- через делитель частоты, формирует сигнал , каждый 8 мпульс которого изменяет число г в счетчик-е 7 импульсов на единицу. В преобразователе 6 код - напряжение по числам Z и 9 формируется сигнал е , В сумматоре 1 из сигнала е вычита/ется сигнал о , в результате чего формируется сигнал постоянного тока п , пропорциональный усредненной по времени разности чисел г и 3 . Пройдя через усилитель 2, этот сигнал управляет двигателем 3. При вращении двигателя 3 датчик 4 фopмиpyet импульсы сигнала Ь . Количество этих импульсов пропорционально частоте вращения двигателя 3. Счетчик 5 по каждому импульсу сигнала Ь изменяет число 3 на единицу. В установившемся режиме частоты импульсов сигналов 5 и Е равны, усредненная по времени разность чисел и 9 постоянная и пропорциональна частоте вращения двигателя 3. Частота вращения двигателя определена частотой сигнала а Сигнал о , обесобеспечивающий подавление пульсаций сигнала е , формируется из сигналов , ч. , J при помощи сигнала а Из Сигналов , J 5 J формирователями 12 - 15 формируются пилообразные сигналы и , k , /1 и м с длит ельностью в один период сигналов & , 6 и постоянным их наклоном. Сумматором 16 из пилообразных сигналов U , i , л ,. м формируется пульсирующий сигнал п путем суммирования сигналов U , к и вычитания сигналов л , /V., т.е. н (U+x) - (м+л). Сигнал пульсирующий прямоугольный. Его частота равна частоте сигналов , размах обратно пропорционален этой частоте. Пройдя через усилитель 11, ртот сигнал преобразуется в прямо- , угольный пульсирующий сигнал с постоя ннь1м размахом, равным по размаху сигналу е . Постоянство размаха обеспечивается изменением коэффициента усиления усилителя 11 выходным сигналом частотного детектора, который прямо пропорционален частоте сигнала О , а следовательно, и частоте сигналов & и Ь . Чем больше коэффициент деления делителя 10, тем выше частота сигнала О , тем выше быстродействие частотного детектора 9. Повыше ние быстродействия детектора 9 необходимо для устранения запаздывания при управлении коэффихщентом усиления усилителем 11 во всем диапазоне скоростей вращения двигателя 3. Изменение частоты вращения двигателя 3 осу ществляется изменением частоты задаю щего генератора 8. Использование предлагаемой системы позволяет регулировать частоту вра щения двигателя в больших пределах и с более высокой точностью за счет полного устранения пульсаций управляющего сигнала. Формула изобретения Система регулирования частоты вра щения двигателя, содержащая частотный детектор, первый сумматор, после довательно соединенные задающий гене ратор и делитель частоты и последова тельно соединенные второй сумматор, первый усилитель и двигатель, о тличающаяся тем, что, с целью расширения диапазона и повышения точности регулирования частоты вращения, в нее введены четыре формирователя пилообразного напряжения, второй усилитель, первый счетчик импульсов и последовательно соединенные импульсньй датчик частоты вращения, второй счетчик импульсов и преобразователь код - напряжение, причем выход задающего генератора соединен через частотный детектор с первым входом второго усилителя, соединенного вторым входом с выходом первого сумматора, выход преобразователя код - напряжение соединен с первым входом второго сумматора, подсоединенного вторым входом к выходу второго усилителя, вал двигателя связан с импульсным датчиком частоты вращения, входы первого сумматора подключены к выходам соответствующих формирователей пилообразного напряжения, выход делителя частоты соединен с входом первого счетчика импульсов, подсоединенного первым выходом к второму входу преобразователя код напряжение, входы первого и второго формирователей пилообразного напряжения подключены соответственно к второму и третьему выходам первого счетчика, входы третьего и четвертого формирователей пилообразного напряжения - соответственно к второму и третьему выходам второго счетчика импульсов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1977 |
|
SU684507A2 |
| Система регулирования скорости вращения двигателя | 1981 |
|
SU1032424A1 |
| Цифровая система управления | 1984 |
|
SU1234811A1 |
| Устройство автоматической подстройки линейного закона частотной модуляции | 1984 |
|
SU1218463A1 |
| Синтезатор частоты с частотной модуляцией | 1986 |
|
SU1345343A1 |
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ ВЫСОТОМЕР | 1998 |
|
RU2133483C1 |
| МНОГОКАНАЛЬНЫЙ ПАНОРАМНЫЙ ПРИЕМНИК | 1996 |
|
RU2115997C1 |
| Устройство для измерения вибрации и перемещений | 1989 |
|
SU1665235A2 |
| УПРАВЛЯЮЩИЙ АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2001 |
|
RU2222028C2 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНДЫ НА СРАБАТЫВАНИЕ СИСТЕМЫ АКТИВНОЙ ЗАЩИТЫ СНАЙПЕРА, РАДИОЛОКАТОР "АНТИСНАЙПЕР" | 2012 |
|
RU2521826C2 |
Изобретение относится к системам автоматического управления, а именно к системам регулирования частоты вращения двигателей. Целью изобретения является расщирение диапазона и повышение точности регулирования частоты вращения. Поставленная цель достигается тем, что в систему введена специальная цепь коррекции, позволяющая устранить пульсации управляющего сигнала на входе электродвигателя. 2 ил.
Фиг.1
| Система автоматического регулиро-ВАНия СКОРОСТи ВРАщЕНия дВигАТЕля | 1979 |
|
SU798688A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система регулирования скорости вращения двигателя | 1981 |
|
SU1032424A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Исследования по повьшению точности, надежности и автоматизации металлорежущих станков | |||
| Сб.трудов УкрНИИСИП | |||
| М., 1971, с | |||
| Шкив для канатной передачи | 1920 |
|
SU109A1 |
