со
tsD
4 Ю
1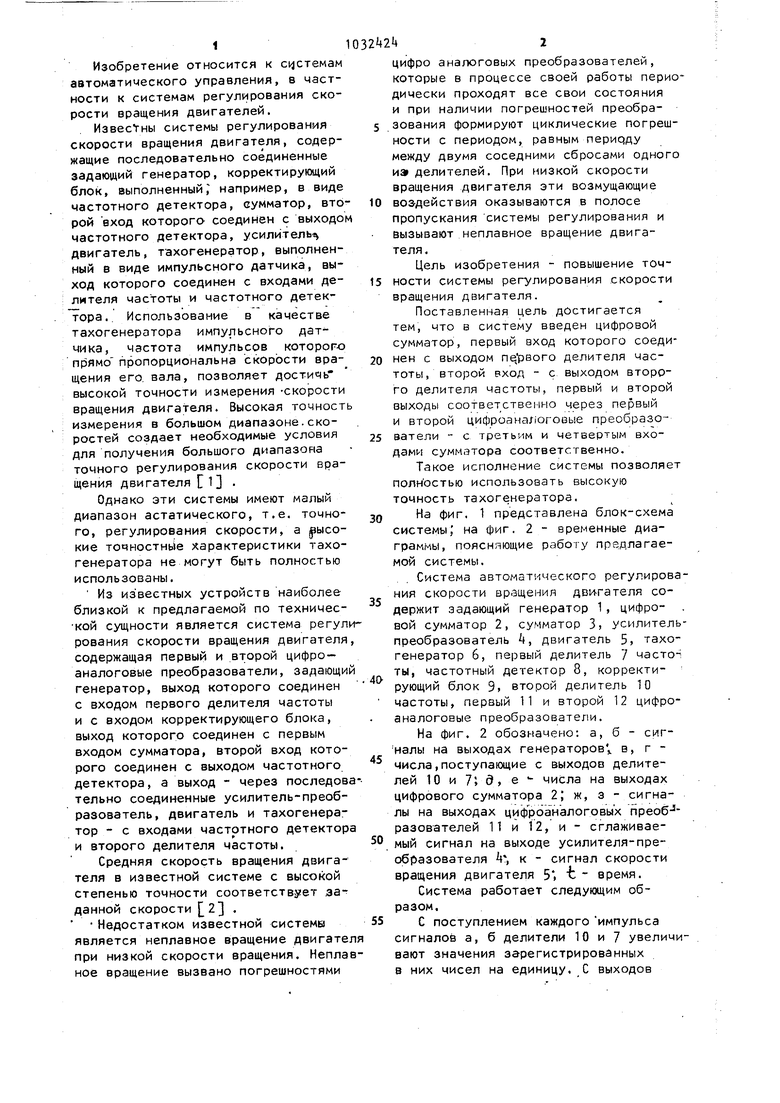
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулиро-ВАНия СКОРОСТи ВРАщЕНия дВигАТЕля | 1979 |
|
SU798688A1 |
| Измерительное устройство гидродинамического лага | 1986 |
|
SU1401383A2 |
| Система регулирования частоты вращения двигателя | 1985 |
|
SU1262448A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2310971C1 |
| Система управления приводом летучих ножниц | 1987 |
|
SU1523269A1 |
| Привод ориентации шпинделя металлорежущего станка | 1984 |
|
SU1241194A1 |
| ЦИФРОАНАЛОГОВЫЙ ПИРОМЕТР | 1993 |
|
RU2046306C1 |
| Частотно-управляемый синхронный электропривод | 1983 |
|
SU1112521A1 |
| Корректирующее устройство | 1975 |
|
SU647644A1 |
| Цифровой фазовый детектор | 1980 |
|
SU875303A1 |
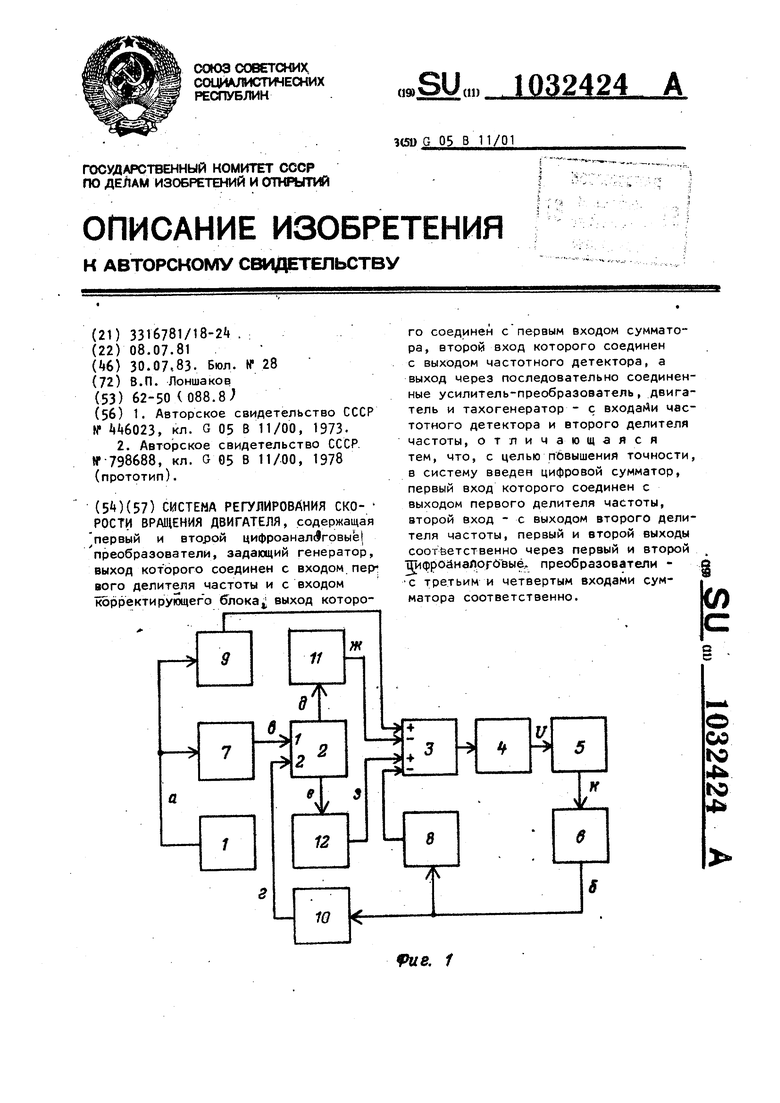
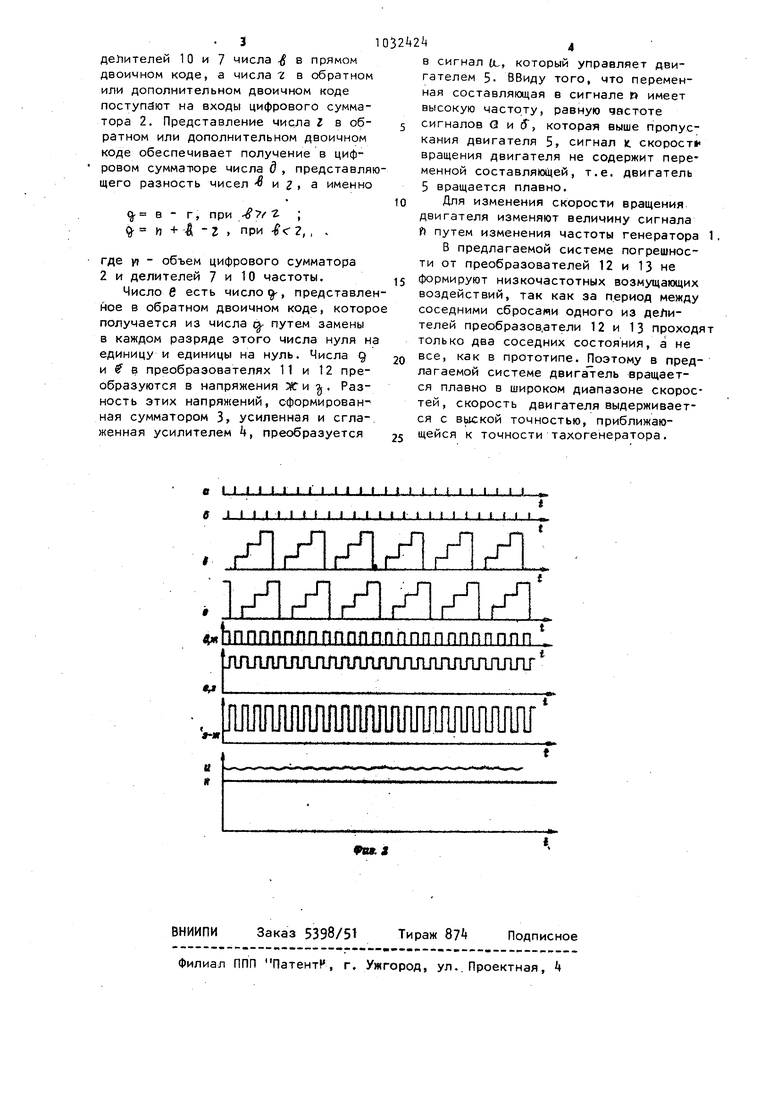
9ив. 1 Изобретение относится к С11стемам автоматического управления, в частности к системам регулирования скорости вращения двигателей. Известны системы регулирования скорости вращения двигателя, содержащие последовательно соединенные задающий генератор, корректирующий блок, выполненный; например, в виде частотного детектора, сумматор, вто рой вход которого соединен с выходо частотного детектора, усилитель« двигатель, тахогенератор, выполненный в виде импульсного датчика, выход которого соединен с входами делнтеля частоты и частотного детектора.. Использование в качестве тахогенератора импульсного датчика, частота импульсов которого прямоГ1ропорциональна скорости вращения его. вала, позволяет достичь высокой точности измерения -скорости вращения двигателя. Высокая точност измерения в большом диапазоне.скоростей создает необходимые условия для получения большого диапазона точного регулирования скорости вращения двигателя Однако эти системы имеют малый диапазон астатического, т.е. точного, регулирования скорости, а (рысокие точностнь1е характеристики тахогенератора не могут быть полностью использованы. Из известных устройств наиболее близкой к предлагаемой по технической сущности является система регул рования скорости вращения двигателя содержащая первый и второй цифроаналоговые преобразователи, задающи генератор, выход которого соединен с входом первого делителя частоты и с входом корректирующего блока, выход которого соединен с первым входом сумматора, второй вход которого соединен с выходом частотного детектора, а выход - через последов тельно соединенные усилитель-преобразователь, двигатель и тахогенератор - с входами частотного детектор и второго делителя частоты. Средняя скорость вращения двигателя в известной системе с высокой степенью точности соответствует заданной скорости 2 . Недостатком известной системы является неплавное вращение двигате при низкой скорости вращения. Непла ное вращение вызвано погрешностями цифро аналоговых преобразователей, которые в процессе своей работы периодически проходят все свои состояния и при наличии погрешностей преобразования формируют циклические погрешности с периодом, равным перирду между двумя соседними сбросами одного иэ делителей. При низкой скорости вращения двигателя эти возмущающие воздействия оказываются в полосе пропускания системы регулирования и вызывают неплавное вращение двигателя. Цель изобретения - повышение точности системы регулирования скорости вращения двигателя. Поставленная цель достигается тем, что в систему введен цифровой сумматор, первый вход которого соединен с выходом п Трвого делителя частоты, второй вход - с выходом второго делителя частоты, первый и второй выходы соответственно через первый и второй цифроаналоговые преобразователи - с третьим и четвертым входами сумматора соответственно. Такое исполнение системы позволяет полностью использовать высокую точность тахогенератора. На фиг. 1 представлена блок-схема системы; на фиг, 2 - временные диаграммы, поясняющие работу предлагаемой системы. Система автоматического регулирования скорости вращения дви-гателя содержит задающий генератор 1, цифровой сумматор 2, сумматор 3, усилительпреобразователь k, двигатель 5, тахогенератор 6, первый делитель 7 часто-i ты, частотный детектор 8, корректирующий блок Э. второй делитель 10 частоты, первый 11 и второй 12 цифроаналоговые преобразователи. На фиг. 2 обозначено: а, б - сигналы на выходах генераторов в, г числа,поступающие с выходов делителей 10 и 7; д, е - числа на выходах цифрового сумматора 2; ж, з - сигналы на выходах цифроаналоговых преоб-разователей 11 и 12, и - сглаживаемый сигнал на выходе усилителя-преобразователя :, к - сигнал скорости вращения двигателя 5, t - время. Система работает следующим образом. С поступлением каждого импульса сигналов а, б делители 10 и 7 увеличивают значения зарегистрированных в них чисел на единицу. С выходов де 1ителей 10 и 7 числа в прямом двоичном коде, а числа t в обратном или дополнительном двоичном коде поступают на входы цифрового сумматора 2. Представление числа I в обратном или дополнительном двоичном коде обеспечивает получение в цифровом сумматоре числа d, представля щего разность чисел -б и 2 а именно % в - г, при B7f t ; И +4 2 , при С2, , . где и - объем цифрового сумматора 2 и делителей 7 и 10 частоты. Число е есть число , представле ное в обратном двоичном коде, котор получается из числа & путем замены в каждом разряде этого числа нуля н единицу и единицы на нуль. Числа 9 и в преобразователях 11 и 12 преобразуются в напряжения Ж и . Разность этих напряжений, сформированная сумматором 3, усиленная и сглаженная усилителем t, преобразуется
в i I i i I I I I м Д t i I 1
i I 1 I i,i 1 i I I 1 i t j j 1 I ff 1 I J
.АЛЛАЛЛ .1/1/1/1 /1
1ПППППЛПППППППППППППППППП
Ф
JlrlЛJUlшшлллJгrlnnJШJmrlГLЛллJ в сигнал tc, который управляет двигателем 5- ВВиду того, что переменная составляющая в сигнале R имеет высокую частоту, равную частоте сигналов а и 5, которая выше пропускания двигателя 5, сигнал ц скорост вращения двигателя не содержит переменной составляющей, т.е. двигатель 5 вращается плавно. Для изменения скорости вращения двигателя изменяют величину сигнала fi путем изменения частоты генератора 1 В предлагаемой системе погрешности от преобразователей 12 и 13 не формируют низкочастотных возмущающих воздействий, так как за период между соседними сбросами одного из деЛителей преобразов.атели 12 и 13 проходят только два соседних состояния, а не все, как в прототипе. Поэтому в предлагаемой системе двигатель вращается плавно в широком диапазоне скоростей, скорость двигателя выдерживается с выской точностью, приближающейся к точности тахогенератора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сальник | 1926 |
|
SU6023A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР | |||
| Система автоматического регулиро-ВАНия СКОРОСТи ВРАщЕНия дВигАТЕля | 1979 |
|
SU798688A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
