(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПОЗИЦИОННОГО УПРАВЛЕНИЯ
вого блока, вход логического блока подключен к выходу блока сравнения, а выходвторого ключевого блока подключен к первому входу первого ключевого блока.
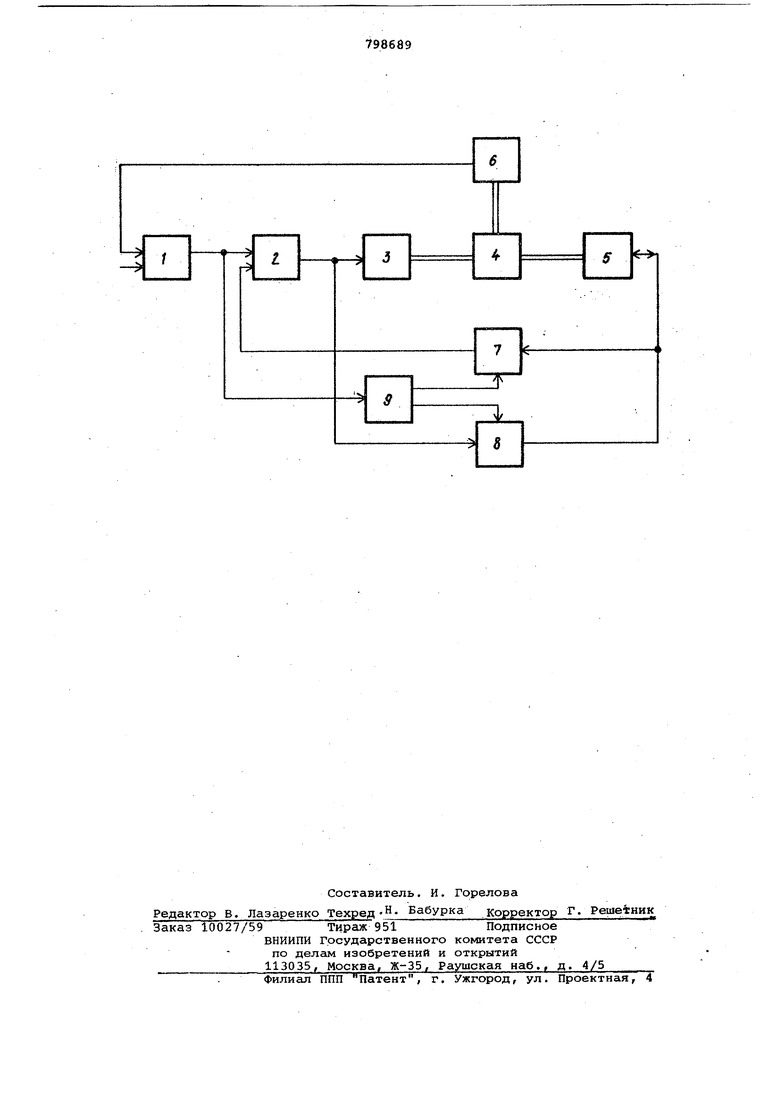
На чертеже изображена функциональная блок-схема предлагаемого устройства.
Устройство содержит последовательно соединенные блок 1, сравнения, усилитель 2, первую электрическую машину 3, объект 4 управления, вторую электрическую машину 5, а также датчик 6 обратной связи, установленный на объекте управления и выход которого соединен со входом блока 1 сраЕнения, первый ключевой блок 7, первый вход которого подключен к выходу второй электрической машины, а выход - к входу усилителя, второй клчевой блок 8, первый вход которого подключен к выходу усилителя, а выход подключен к входу первого ключевого блока, логический блок 9, вход которого подключен к выходу блока сравнения, а выходы подключены ко вторым входс1М ключевых блоков.
Устройство работает следующим образом.
Блок 1 сравнения, сравнивая действительное положение объекта 4 упраления, измеряемое датчиком б обратной связи, с заданным положением, вы дает сигнал управления, пропорциональный ошибке положения, который поступает на усилитель 2 к на логический блок 9. Усилитель 2 управляет электрическими.машинами 3 и 5 постоянного тока. Логический блок 9 в зависимости от величины ошибки формирует сигналы, управляющие ключевыми блоками 7 и 8, при большой величине ошибки блок 7 закрыт, а блок 8 открыт, машины 3 и 5 работают в режиме двигателя и полностью используютсвои динамические возможности, при уменьшении ошибки до некоторого определенного значения ключевой блок
7 открывается, а ключевой блок 8 за крывается - машина 3 продолжает работать в режиме двигателя, а машина 5 переключается в режим тахогенератора,и сигнал с ее якорной обмотки используется для стабилизации системы.
Таким образом, в зоне больших ошибок, когда от устройства требуется развивать максимальное ускорение, отсутствует дополнительная инерционная нагрузка, вносимая тахогенератором, что способствует повышению быстродействия .
Формула изобретения
Устройство для автоматического позиционного управления, содержащее последовательно соединенные блок сравнения, усилитель, первую электрическую машину, объект управления, вторую электрическую машину, а также датчик обратной связи, установленный на объекте управления и подключенный выходом к блоку сравнения, первый ключевой блок, первый вход которого подключен к выходу второй электрической машины, а выход ко второму входу усилителя, отличающеес я тем, что, с целью повышения бысродействия, оно дополнительно содержит логический блок и второй ключевой блок, первый вход которого подключен к выходу усилителя, второй вход - ко второму выходу логического блока, первый выход которого подключен ко второму входу первого ключевого блока, вход логического блока подключен к выходу блока сравнения, а выход второго ключевого блока подключен к первому входу первого ключевого блока.
Источники информации, принятые во внимание при экспертизе
1.Цифровые следящие системы судовой автоматики, Ленинград, 1972, с. 363, рис. 8 и 17.
2,Авторское свидетельство СССР № 135941, кл. Q 05 В 11/06, 1959 (прототип).
-
«-
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1132329A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| Устройство для программного управления | 1977 |
|
SU734620A1 |
| Частотно-регулируемый асинхронный электропривод | 1985 |
|
SU1282302A1 |
| Нереверсивная электрическая машина с вентильно-механическим коммутатором | 1989 |
|
SU1791904A1 |
| Устройство позиционирования | 1990 |
|
SU1781673A1 |
| СЛЕДЯЩИЙ РУЛЕВОЙ ЭЛЕКТРОПРИВОД | 2024 |
|
RU2832922C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД С ТОРМОЗНЫМ УСТРОЙСТВОМ | 1992 |
|
RU2066873C1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| Устройство для управления электродвигателем постоянного тока | 1978 |
|
SU780139A1 |