Изобретение относится к области управления механизмами производственного транспорта, а именно: кранами, тележками, каретками, рольгангами и др.
Известно устройство для автоматической остановки транспортного средства в заданном месте, содержащее подвижный объект (транспортное средство), путевые датчики, систему управления, содержащую двигатель, тиристорный преобразователь, тахогенератор, регулятор скорости (блок регулирования режимов) и блок задания (задающий командоконтроллер). Точность позиционирования этого устройства ограничена по диум основным причинам. Во- первых, низкья точность позиционирования вызывается применением в качестве путевых датчиков тензометрических элементов, имеющих большой разброс параметров, во вторых, точность позиционирования зависит от симметричности расположения груза на транспортном средстве, т.к. смещение центра тяжести груза непосредственно вызывает ошибку позиционирования.
Известны также устройства для позиционных остановок тележек, содержащие подвижный объект (тележку), датчик импульсов, счетчики, блок задания (источник сигнала), устройства индикации. Точность позиционирования этих устройств недостаточна: во-первых, она ограничена недостаточной чувствительностью магнитных шунтов; во-вторых, в этих устройствах не осуществляется регулирование по поло со
о
-ч|
со
жению тележки при срабатывании датчика, взаимодействующего с магнитными шунтами; в-третьих, осуществляется не плавное оптимальное снижение скорости на участке торможения, а ступенчатое снижение скорости с нерегулируемым выбегом, происходящим на последнем технологическом участке.
Известна также цифровая система автоматического управления, содержащая блок задания (задающее устройство), сумматор, цифроаналоговый преобразователь(преобразователь код-напряжение), тиристорный преобразователь (усилитель), двигатель, импульсный датчик перемещения (датчик обратной связи) и логические элементы, Точность позиционирования в такой системе ограничена по следующим причинам: во- первых, в связи с отсутствием системы управления скоростью подвижного объекта, затруднительно обеспечение четкого позиционирования при изменяющейся нагрузке двигателя (изменяющемся весе груза) в ходе технологического процесса; во-вторых, зачастую при обоснованно выбранном количестве разрядов блока задания и сумматора вынужденно ограничивается вес каждого разряда из-за больших перемещений подвижного объекта, что снижает точность позиционирования.
Наиболее близкой по технической сущности к предлагаемой системе является позиционная система с импульсным датчиком перемещения, содержащая блок задания, сумматор, цифроаналоговый преобразователь, нелинейный преобразователь, аналоговую двухконтурную систему управления скоростью привода, подвижный объект (механизм), импульсный датчик перемещения, формирователь, реверсивный счетчик и два индикатора. Точность позиционирования в такой системе снижена из-за недостаточной помехозащищенности, связанной с возникающими при перемещении подвижного объекта юзом и буксованием колеса, на валу которого установлен импульсный датчик перемещения. При юзе и буксовании колеса нарушается соответствие между числом импульсов, вырабатываемых импульсным датчиком перемещения, и истинным перемещением подвижного объекта. Этот недостаток системы сказывается на точности позиционирования особенно при больших перемещениях подвижного объекта.
Целью изобретения является повышение точности позиционирования путем повышения помехозащищенности системы.
Поставленная цель достигается тем, что устройство позиционирования, содержащее последовательно соединенные цифровые блок задания и сумматор, цифроанэло- говый преобразователь, нелинейный преобразователь, аналоговую двухконтурную систему управления скоростью привода
(АДСУСП), подвижный объект, импульсный датчик перемещения, формирователь импульсов, а также реверсивный счетчик, вы- ход которого подключен ко второму входу цифрового сумматора, и два индикатора, до0 полнительно снабжено путевым датчиком, органом управления, двумя компараторами, логическим элементом И, триггером, ключом и одновибратором, причем путевой датчик установлен перед осью позиционирования на
5 минимальном расстоянии (это расстояние в дальнейшем именуется зоной позиционирования), достаточном для остановки подвижного объекта, на котором установлен орган управления, вход первого компаратора под0 ключей к выходу цифрового сумматора, вход второго компаратора подключен к выходу АДСУСП, выходы компараторов подключены ко входам логического элемента И, входы триггера подключены к выходам логическо5 го элемента И и путевого датчика, выход триггера подключен к управляющему входу ключа, включенного между выходом формирователя импульсов и входом реверсивного счетчика, вход одновибратора подключен к
0 выходу логического элемента И, а выход одновибратора подключен ко входам сброс реверсивного счетчика и цифрового блока задания.
Наличие в заявляемом устройстве путе5 вого датчика и органа управления, позволяющих определять момент входа подвижного объекта в зону позиционирования, двух компараторов и логического элемента И, позволяющих определить момент
0 достижения подвижным объектом оси позиционирования, при отсутствии рассогласования между заданием на перемещение и истинным перемещением подвижного объ екта, а также момент снижения скорости
5 подвижного объекта до нуля, триггера и ключа, позволяющих подключать либо от ключать обратную связь по положению, я также одновибратора, позволяющего вое станавливать нулевые значения реверсив
0 ного счетчика и блока задания, считаем существенными отличиями заявляемого устройства.
Изменение структуры устройства позиционирования, заключающееся в подключе5 нии обратной связи по положению в момент входа подвижного объекта в зону позиционирования и отключении обратной связи по положению с одновременным восстановлением нулевых значений реверсивного счетчика и блока задания в момент достижения
подвижным объектом оси позиционирования при отсутствии рассогласования между заданием на перемещение и истинным перемещением подвижного объекта, позволяет повысить точность позиционирования путем повышения помехозащищенности устройства, Повышение помехозащищенности устройства достигается за счет исключения влияния на качество регулирования юза и буксования колеса, на валу ко- торого установлен импульсный датчик перемещения, при перемещении подвижного объекта вне зоны позиционирования.
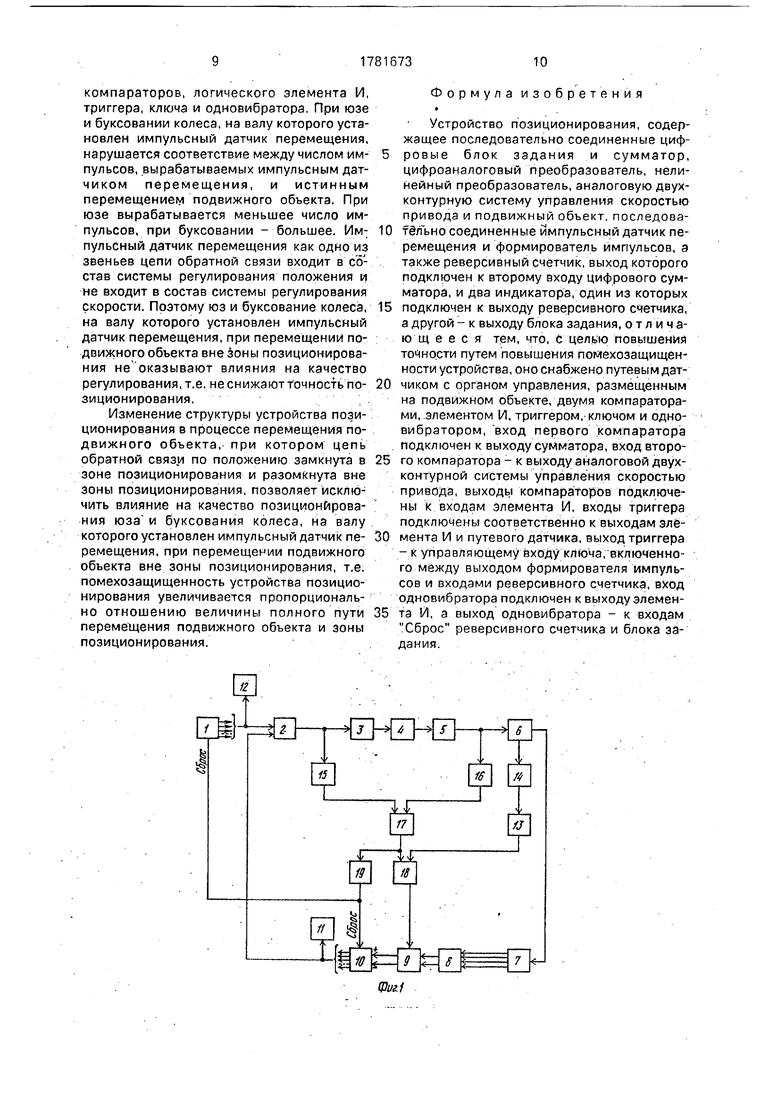
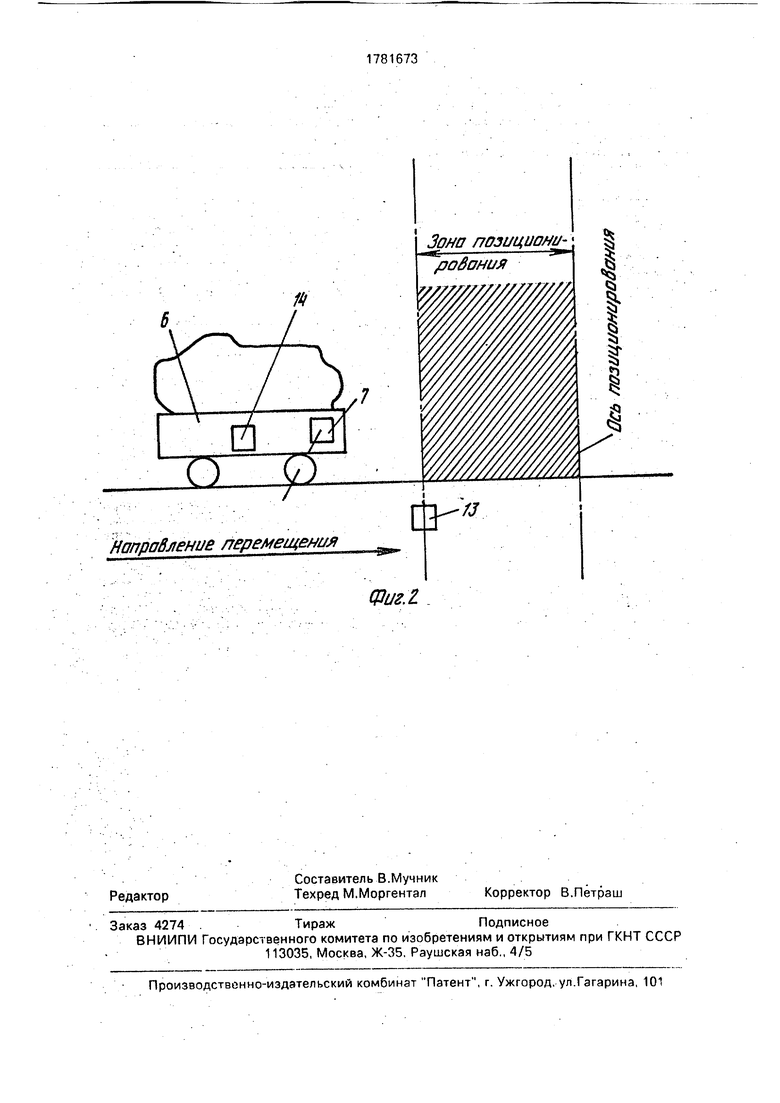
На фиг. 1 изображена блок-схема предлагаемого устройства; на фиг. 2 - схема рас- положения некоторых элементов устройства.
Устройство позиционирования содержит последовательно соединенные цифровой блок 1 задания, цифровой сумматор 2, цифроаналоговый преобразователь 3, нелинейный преобразователь 4, аналоговую двухконтурную систему 5 управления скоростью привода (АДСУСП), подвижный объект б, импульсный датчик 7 перемещения, формирователь 8 импульсов, ключ 9 и реверсивный счетчик 10, выход которого подключен ко второму входу цифрового сумматора 2, а также к индикатору 11, и индикатор 12, подключенный к выходу бло- ка 1 задания. Кроме того, устройство содержит путевой датчик 13, определяющий начало зоны позиционирования подвижного объекта 6, на котором установлен орган 14 управления, компаратор 15, вход которо- го подключен к выходу цифрового сумматора 2, компаратор 16, вход которого подключен к выходу АДСУСП 5, логический элемент И 17, входы которого подключены к выходам компараторов 15 и 16, триггер 18, входы которого подключены к выходам логического элемента И 17 и путевого датчика 13, а выход - к управляющему входу ключа 9, и одновибратор 19, вход которого подключен к выходу логического элемента И 17, а выход - ко входам Сброс реверсивного счетчика 10 и цифрового блока 1 задания.
Устройство работает следующим образом,
В исходном состоянии на выходе циф- рового блока 1 задания сигнал равен нулю. Соответственно равны нулю выходные сигналы цифрового сумматора 2, цифроанало- гового преобразователя 3 нелинейного преобразователя 4, АДСУСП 5; подвижный объект 6 находится в состоянии покоя, не вырабатываются выходные сигналы импульсного датчика 7 перемещения и формирователя 8 импульсов, ключ 9 заперт, равен нулю выходной сигнал реверсивного счетчика 10, на индикаторах 11 и 12 индицируются, нули, на путевой датчик 13 орган 14 управления влияния не оказывает, на выходах компараторов 15, 16 и логического элемента И 17 - сигнал логической 1, триггер 18 находится в состоянии, обеспечивающем закрытое состояние ключа 9, на выходе од- новибратора 19 сигнал равен нулю.
Сигнал задания на перемещение и позиционную остановку подвижного объекта 6 представляет собой число в прямом параллельном коде, равное сумме выходных импульсов, вырабатываемых импульсным датчиком 7 перемещения при перемещении подвижного объекта от начала зоны позиционирования до оси позиционирования. Этот сигнал вырабатывается цифровым блоком 1 задания и подается на первый вход цифрового сумматора 2. Поскольку на второй вход цифрового сумматора 2 подается выходной сигнал реверсивного счетчика 10, равный в этот момент нулю, на выходе цифрового сумматора 2 вырабатывается сигнал, равный сигналу задания. Этот сигнал подается в цифроаналоговый преобразователь 3, где преобразуется в аналоговую форму, затем - в нелинейный преобразователь 4, где преобразуется в соответствии с выбранным законом регулирования, и в АДСУСП 5, которая приводит в движение подвижный объект 6 и обеспечивает его перемещение с заданной скоростью. При этом импульсный датчик 7 перемещения вырабатывает импульсы переменной длины (в зависимости от скорости перемещения подвижного объекта 6). количество которых пропорционально перемещению подвижного объекта 6. В формирователе 8 импульсов, куда поступают выходные импульсы импульсного датчика 7 перемещения, определяется направление Ёращения импульсного датчика 7 перемещения, т.е. направление перемещения подвижного объекта 6, и осуществляется преобразование этих импульсов в импульсы постоянной длительности, причем длительность выходных импульсов формирователя 8 импульсов не превьпиает длительности выходных импульсов импульсного датчика 7 перемещения при максимальной скорости перемещения подвижного объекта 6. Однако выходные импульсы формирователя 8 импульсов через ключ 9 не проходят, поскольку он по- прежнему заперт, на выходе реверсивного счетчика 10 сигнал no-прежнему равен нулю, на выходе сумматоре 2 сигнал остается равным сигналу задания, чем обеспечивается постоянство задания скорости перемещения подвижного объекта 6, Показания индикатора 11 равны нулю, показания индикагора 12 равны заданию на перемещение и позиционную остановку подвижного объекта 6. В момент появления на выходе цифрового сумматора 2 сигнала отличного от нуля на выходе компаратора 15 вырабатывается сигнал логического О, при появлении на выходе АДСУСП 5 сигнала отличного от нуля на выходе компаратора 16 вырабатывается сигнал логического О. На выходе логического элемента И 17 также вырабатывается сигнал логического О. При этом состояние триггера 18 не изменяется, чем обеспечивается закрытое состояние ключа 9; на выходе одновибратора 19 сигнал по- прежнему равен нулю. Таким образом устройство работает в режиме регулирования скорости привода.
При входе подвижного объекта б в зону позиционирования орган 14 управления, сблизившись с путевым датчиком 13, вызывает его срабатывание. На выходе путевого датчика 13 вырабатывается сигнал, переключающий триггер 18 в состояние, при котором ключ 9 открывается. С этого момента выходные импульсы формирователя 8 импульсов через открытый ключ 9 начинают поступать на вход реверсивного счетчика 10. Выходной сигнал реверсивного счетчика 10, вырабатываемый в дополнительном коде, подается на второй вход цифрового сум- матора 2, чем обеспечивается изменение структуры устройства позиционирования за счет подключения цепи обратной связи по положению, состоящей из импульсного датчика 7 перемещения, формирователя 8 импульсов, реверсивного счетчика 10 и индикатора 11, устройство начинает работать в режиме регулирования положения подвижного объекта 6 в зоне позиционирования. Поскольку выходной сигнал цифрового блока 1 задания подается на первый цифрового сумматора 2 в прямом коде, а выходной сигнал реверсивного счетчика 10 подается на второй вход цифрового сумматора 2 в дополнительном коде, на выходе цифрового сумматора 2 вырабатывается сигнал рассогласования между сигналом здания на перемещение и сигналом, соответствующим истинному перемещению подвижного объекта б в зоне позиционирования. При дальнейшем перемещении подвижного объекта 6 сигнал на выходе путевого датчика 13 исчезает, т.к. орган 14 управления, удаляясь, перестает на него воздействовать, однако триггер 18 по-прежнему остается в состоянии, обеспечивающем открытое состояние ключа 9 В процессе перемещения подвижного объекта (5 в зоне позиционирования сигнал рассогласования на выходе цифрового сумматора 2 уменьшается, АДСУСП 5
осуществляет торможение подвижного объекта 6 в соответствии с выбранным законом регулирования, При достижении подвижным объектом 6 оси позиционирования выходной сигнал реверсивного счетчика 10 становится эквивалентным сигналу задания на перемещение и позиционную остановку подвижного объекта б, что было обусловлено выбором величины этого сигнала, На вы0 ходе цифрового сумматора 2 вырабатывается сигнал, равный нулю, АДСУСП 5 обеспечивает остановку подвижного объекта 6. При появлении на выходе цифрового сумматора 2 сигнала, равного ну5 лю, срабатывает компаратор 15, и на его выходе вырабатывается сигнал логической 1. При появлении на выходе АДСУСП 5 сигнала равного нулю срабатывает компаратор 16, и на его выходе вырабатывается
0 сигнал логической 1. При этом на выходе логического элемента И 17 также вырабатывается сигнал логической 1, что вызывает, во-первых, переключение триггера 18 в состояние, при котором вновь обеспечивается
5 запертое состояние ключа 9, во-вторых, срабатывание одновибратора 19 . Выходной сигнал одновибратора 19, воздействуя на входы Сброс цифрового блока 1 задания и реверсивного счетчика 10, обнуляет их вы0 ходные сигналы. Тем самым устройство приводится в исходное состояние и готово к очередному перемещению и позиционированию подвижного объекта 6 на следующей оси позиционирования.
5 В качестве примера аппаратной реализации вноЪь вводимых элементов устройства позиционирования можно назвать следующий перечень функциональных ячеек управления производства по ХЭМЗ: компарэторы-ЯФУ0 0029 и ЯФУ-0271, логический элемент И-ЯФУ- 0162, триггер-ЯФУ-0278,ключ-ЯФУ-0151, одновибратор-ЯФУ-0333. Функции формирователя импульсов выполняет ячейка управления ЯФУ-1248. Функции, выполняемые этими
5 элементами, могут быть реализованы также на программируемой вычислительной технике. В качестве путевого датчика и органа управления могут быть применены конечный выключатель бесконтактный типа КВД-25 и
0 металлическая пластина.
Таким образом, устройство позиционирования при перемещении подвижного объекта вне зоны позиционирования является системой регулирования скорости привода, а
5 при перемещении подвижного объекта в зоне позиционирования - системой регулирования положения подвижного объекта.
Изменения структуры устройства позиционирования осуществляются с помощью путевого датчика, органа управления, двух
компараторов, логического элемента И, триггера, ключа и одновибратора. При юзе и буксовании колеса, на валу которого установлен импульсный датчик перемещения, нарушается соответствие между числом им- пульсов, вырабатываемых импульсным датчиком перемещения, и истинным перемещением подвижного объекта. При юзе вырабатывается меньшее число импульсов, при буксовании - большее. Им- пульсный датчик перемещения как одно из звеньев цепи обратной связи входит в состав системы регулирования положения и не входит в состав системы регулирования скорости. Поэтому юз и буксование колеса, на валу которого установлен импульсный датчик перемещения, при перемещении подвижного объекта вне зоны позиционирования не оказывают влияния на качество регулирования, т.е. не снижают точность по- зиционирования.
Изменение структуры устройства позиционирования в процессе перемещения подвижного объекта, при котором цепь обратной связи по положению замкнута в зоне позиционирования и разомкнута вне зоны позиционирования, позволяет исключить влияние на качество позиционирования юза и буксования колеса, на валу которого установлен импульсный датчик пе- ремещения, при перемещении подвижного объекта вне зоны позиционирования, т.е. помехозащищенность устройства позиционирования увеличивается пропорционально отношению величины полного пути перемещения подвижного объекта и зоны позиционирования.
Формула изобретения
Устройство позиционирования, содержащее последовательно соединенные цифровые блок задания и сумматор, цифроаналоговый преобразователь, нелинейный преобразователь, аналоговую двух- контурную систему управления скоростью привода и подвижный объект, последова- соединенные импульсный датчик перемещения и формирователь импульсов, а также реверсивный счетчик, выход которого подключен к второму входу цифрового сумматора, и два индикатора, один из которых подключен к выходу реверсивного счетчика, а другой - к выходу блока задания, отличающееся тем, что, с целью повышения точности путем повышения помехозащищенности устройства, оно снабжено путевым датчиком с органом управления, размещенным на подвижном объекте, двумя компараторами, элементом И, триггером, ключом и одно- вибратором, вход первого компаратора подключен к выходу сумматора, вход второго компаратора - к выходу аналоговой двух- контурной системы управления скоростью привода, выходы компараторов подключены к входам элемента И, входы триггера подключены соответственно к выходам элемента И и путевого датчика, выход триггера - к управляющему входу ключа, включенного между выходом формирователя импульсов и входами реверсивного счетчика, вход одновибратора подключен к выходу элемента И, а выход одновибратора - к входам Сброс реверсивного счетчика и блока задания.
Ноправление перемещения
Зона позициони

| название | год | авторы | номер документа |
|---|---|---|---|
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Устройство для весового дозирования сыпучих материалов | 1982 |
|
SU1076766A1 |
| Устройство для испытания гибких кабельных изделий на многократные перемотки | 1990 |
|
SU1779949A1 |
| Устройство для программного управления позиционированием | 1984 |
|
SU1213466A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ НЕРОВНОСТЕЙ КОЛЕСНЫХ ПАР ПОДВИЖНОГО СОСТАВА12 | 1973 |
|
SU384711A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2035692C1 |
| Электрогидравлический следящий привод | 1985 |
|
SU1269092A1 |
| Устройство для измерения геометрических параметров движущихся лесоматериалов | 1982 |
|
SU1060943A1 |
| Способ изготовления наружных обшивок для кровельных панелей с утеплителем и устройство для его осуществления | 1990 |
|
SU1784418A1 |
| Устройство для контроля толщины сварного шва | 1989 |
|
SU1839229A1 |
Изобретение относится к технике управления механизмами производственного транспорта. Цель изобретения - повышение точности путем повышения помехозащищенности. Устройство содержит последова- тельно соединенные блок задания, сумматор, цифроаналоговый преобразователь, нелинейный преобразователь, аналоговую двухконтурную систему управления скоростью привода, подвижный объект, последовательно соединенные импульсный датчик перемещения и формирователь, а также реверсивный счетчик и два индикатора. Новым в системе является то, что в нее дополнительно введены путевой датчик, орган управления, два компаратора, элемент И, триггер, ключ и одновибратор, позволяющие изменять структуру системы регулирования в процессе перемещения подвижного объекта. 2 ил. сл с
Фиг. 2.
| Устройство для автоматическойОСТАНОВКи ТРАНСпОРТНОгО СРЕдСТВАВ зАдАННОМ MECTE | 1979 |
|
SU812616A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Устройство для позиционной остановки тележки | 1984 |
|
SU1186668A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО АДРЕСОВАНИЯГРУЗОВ | 1972 |
|
SU435177A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
