Ot-i - угол поворота СКВТ
смещения по координате х, угол поворота СКВТ
ввода координаты х, - угол поворота СКВТ см щения по координате з - угол поТворота СКВТ
ввода координаты Xgi х и X - текущие значения.поисковых координат. Недостатком такого устройства является возможность воспроизведени5| лишь сёпарабельных экстремальных характеристик, т.е. характеристик с взаимно-независимыми настраиваемыми координатами.
Цель изобретения - расширение функциональных возможностей устройства путем воспроизведения двумерных . экстремальных характеристик с взаимосвязанными настраиваемыми координатами .
Указанная цель достигается тем, что в устройство для воспроизведения экстремальных характеристик двухпараметрических объектов управления, содержащее две пары синусно-косинусных вращающихся трансформаторов, в каждой из которых роторные обмотки соответственно соединены друг с другом, и два сумматора,- причем выходная статорная обмотка первой пары синусно-косинусных вращающихся трансформаторов соединена с первым входом первого сумматора, второй вход которого является входом устройства и соединен с входной статорной обмоткой первой пары синусно-косинусных вращающихся трансформаторов а выходная обмотка второй пары синусно-косинусных трансформаторов соединена с первым входом второго сумматора, введены дополнительная пара синусно-косинусных вращающихся трансформаторов, роторные обмотки которых соответственно соединены дру с другом, и два редуктора, причем роторы синусно-косинусных вращающихся трансформаторов первой пары через редукторы кинематически связаны с роторами синусно-косинусных вращающихся трансформаторов дополнительной пары, входная статорная обмотка которой подключена к выходу первого сумматора, соединенному со вторым входом второго сумматора, а выходные статорные обмотки дополнительной пары синусно-косинусных вращающихся трансформаторов соответственно соединены со входными статорными обмотками вторЪй пары синусно-косинусных вращающихся трансформаторов .
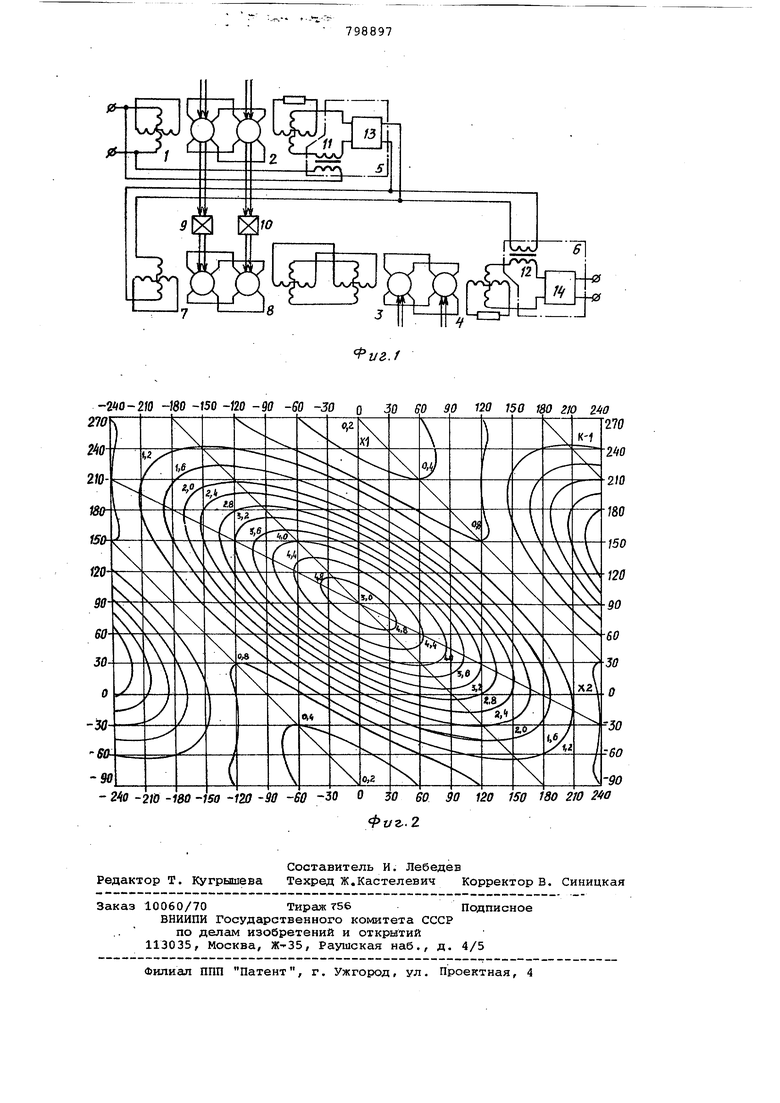
На фиг. 1 представлена схема устройства, .на фиг. 2 - линия равного уровня поверхности, воспроизводимой устройством при коэффициенте взаимосвязи настраиваемых координат К-1.
Устройство содержит две пары синусно-косинусных вращающихся трансформаторов (СКВТ) 1, 2 и 3, 4, сумматоры 5 и б, дополнительную пару СКВТ 7, 8, редукторы 9, 10 с одинаковыми коэффициентами передачи.. Сумматоры 5, 6 состоят соответственно из трансформаторов 11, 12 и согласующих устройств 13, 14. Первичные обмотки трансформаторов 11, 12 являются одним из входов сумматоров 5, б. Второй вход сумматоров 5, б соединен с согласующими устройствами 13, 14 через последовательно включенные вторичные обмотки трансформаторов 11, 12.
При подаче на вход Устройства сигнала переменного тока постоянной амплитуды, на выходе сумматора 5 амплитуда напряжения определяется выражением (1). Это напряжение является входным для второй части схемы (СКВТ 3, 4, 7, 8 и сумматор б).
Известно, что при соединении двух СКВТ роторными обмотками и подключении к первой статорной обмотке первого СКВТ сигнала переменного тока, напряжения на статорных обмотках второго СКВТ имеют вид:
U2 sin ( ) (3) Уад KoU cos (. С) где KO - постоянный коэффициент
U., - напряжение на первой статорной обмотке первого СКВТ ( - угол поворота первого СКВТ, - угол поворота второго СКВТ. В случае подключения входного напряжения ко второй статорной обмотке первого СКВТ, выходные напряжения на статорных обмотках второго СКВТ принимают вид:
Ugf созЛог / - ) (5) Ugj S in (oi,/ - а;2 ) (6) где и, - напряжение на второй статорной обмотке первого СКВТ.
В соответствии с зависимостями (3) и (4) амплитуды напряжений на статорных обмотках СКВТ 8 выражаются формулами:
Ug KpUs sin (ctY - ) (7) иег KpUg COS (oty -cjig) .(8) где Ug - выходное напряжение сумматора 5,
Kgoi o(i - угол поворота СКВТ 1, dii - угол поворота СКВТ 2, - угол поворота СКВТ 7, ( - угол поворота СКВТ 8, Kg К - коэффициенты передачи редукторов 9 и 10.
Напряжение на статорной обмотке СКВТ 4 Ujj складывается из составляющих, зависящих от напряжений Ug. и приложенных к статорным обмоткам
СКВТ 3. Используя выражения () ,
(6) и (7), (8), получаем:
и KoUg cos ()Коив2х . xsin () sin к (of,)x xcos (oJj-o,,) +- Kf K (or, -ct;/i)v 19
sin ( - ) KgUj s in К (cC, - ci;:2)+ (a-) ,
где угол поворота СКВТ 3,
of.4 - угол поворота СКВТ 4.
Окончательно , с учетом выражений (1) и (Э) t амплитуда напряжения на выходе устройства имеет
. UjA Л С+- sin К (csi -cvIgH + ()- АТВ + sin (о )1х
х{с + sint; К (d-1-oi + (а;з-о 4да
А (B + sinX, Itc + sinCK-X + х),(10)
где А , А , В 1, С 1 - постоянные
коэффициенты, Х и текущие знчения поисвых координат .
Из зависимости (10) видно, что при изменении величин oi и возможен неограниченный дрейф модулируемой характеристики по координатам X/ и Х,.
Линии равного уровня поверхности при ,8,,5, (фиг. 2), Изменяя коэффициент передачи К редукторов 9 и 10, можно менять взаимосвязь между координатами Х и Xg. .
Taft как вид моделируемой поверхности заранее известен, то устройство позволяет с максимальной наглядностью исследовать двухпарамет-i рические экстремальные регуляторы. С этой целью на роторах СКВТ 2 и CKBJ 4 устанавливают датчики углов и , выходные сигналы которых подают на усилители вертикального и горизонтального отклонения электроннолучевого индикатора (на чертеже не показано). На экран индикатора надевается маска с линиями равного уровня моделируемой поверхности. При const и ot const приращения ct и равны приращениям Х и XQ. Задавая начальное значение координат Х и XQ изменениям ct и г 3. затем, разворачивая роторы СКВТ 2 и СКВТ 4 с помощью приводов, управляемых от исследуемого экстремального регулятора, можно на экране индикатора наблюдать траекторию поиска экстремума моделируемой поверхности .
Переключение вида моделируемой . поверхности можно осуществлять дискретным изменением коэффициента передачи редукторов 9 и 10 путем, например, смены пары шестерен. При этом заменяется также маска на экране электроннолучевого индикатора .
Таким образом, изобретение позволяет моделировать ряд поверхностей с взаимосвязанными координатами, причем возможно неограниченное смещение экстремума моделируемой характеристики по настраиваемым координатам. Форма моделируемой поверхности легко изменяется переключением коэффициентов передачи редукторов. Вид моделируемых поверхностей заранее известен, что существенно упрощает эксплуатацию устройства и позволяет с максимальной наглядностью исследовать двухпараметрические экстремальные регуляторы.
Формула изобретения
Устройство для воспроизведения экстремальных характеристик двухпараметрических объектов управления, содержащее две пары синусно-косинусных вращающихся трансформаторов, в каждой из которых роторные обмотки соответственно соединены другс другом, и два сумматора, причем выходная статорная обмотка первой пары синусно-косинусных вращающихся трансформаторов соединена с первым входом первого сумматора, второй вход которого является входом устройства и соединен с входной статорной обмоткой первой пары синусно-косинусных вращающихся трансформаторов а выходная обмотка второй пары синусно-косинусных трансформаторов соединена с первым входом второго сумматора, отличающееся тем, что, с целью расширения функциональных возможностей за счет воспроизведения двумерных экстремальных характеристик с взаимосвязанными настраиваемыми координатами, в него введены дополнительная пара синусно-косинусных вращающихся трансформаторов, роторные обмотки которых соответственн соединены друг с другом, и два редуктора, причем роторы синусно-косинусн вращакедихся трансформаторов первой пары через редукторы кинематически связаны с роторами синусно-косинусны вращакйцихся трансфорМаторов дополнительной пары, входная статорная обмотка которой подключена к выходу певого сумматора, соединенному со вторым входом второго сумматора, а выходные статорные обмотки дополниГельной пары синусно-косинусных вращающися трансформаторов соответственно соединены со входными статорньами обмотками второй пары синусно-косинусных враадакхцихся трансформаторов.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 589613, кл. G Об G 7/66, 1975.
2.Авторско.е свидетельство СССР 611220, кл. G Об G 7/48, 1976 (прототип).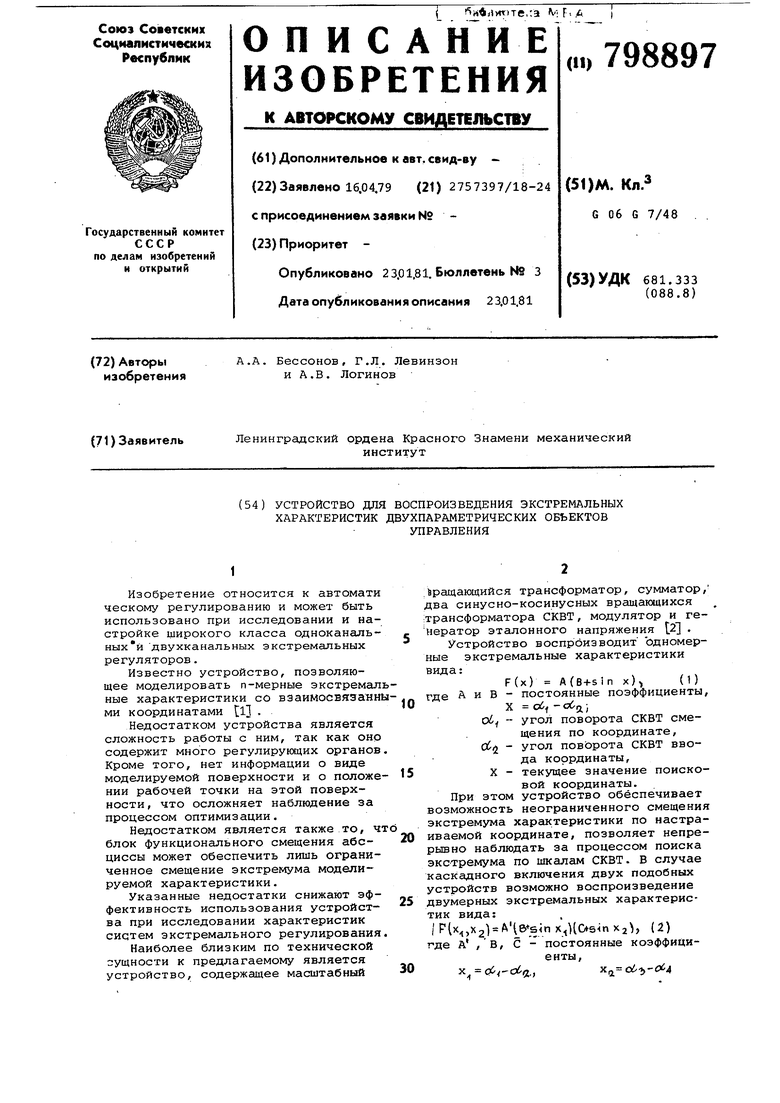
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для воспроизведения экстремальных характеристик | 1976 |
|
SU611220A1 |
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |
| Устройство для определения азимута | 1986 |
|
SU1377586A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1120386A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ РЕВЕРБЕРАЦИОННОЙ | 1973 |
|
SU376781A1 |
| СЧЕТНО-РЕШАЮЩЕЕ УСТРОЙСТВО | 1973 |
|
SU408325A1 |
| Устройство для контроля систем автоматического регулирования | 1978 |
|
SU1841197A1 |
| Устройство для воспроизведения функциональных зависимостей | 1980 |
|
SU898448A1 |
| Преобразователь кода в угол поворота вала | 1985 |
|
SU1312741A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ BtTPA С БОРТА ДВИЖУЩЕГОСЯ КОРАБЛЯ | 1971 |
|
SU296036A1 |