(54) ЭЛЕКТРОМАГНИТНЫЕ ВЕСЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Весы с электромагнитным уравновешиванием | 1982 |
|
SU1046619A1 |
| Электронные цифровые весы | 1981 |
|
SU991175A1 |
| Цифровые весы | 1982 |
|
SU1089423A1 |
| Весоизмерительное устройство | 1979 |
|
SU918793A1 |
| Электромагнитные весы | 1979 |
|
SU838389A1 |
| Цифровые весы | 1986 |
|
SU1352233A1 |
| Весы с электромагнитным уравновешиванием | 1986 |
|
SU1394055A1 |
| Электромагнитные весы | 1986 |
|
SU1337671A1 |
| Электромагнитные весы | 1979 |
|
SU838388A1 |
| Цифровые электромагнитные весы | 1989 |
|
SU1631305A1 |
1
Изобретение относится к технике измерения массы, конкретнее к весам с электромагнитным урарчовешиванием.
Известны цифровые электромг«нитные весы, в которых повышение точности достигается применением двух подвижных катушек, расположенных в зазоре магнитной системы, которые связаны с двумя преобразователями некомпенсации и двумя электрическими сисстемами уравновешивания, причем для обеспечения автоматической коррекции .на изменение магнитной индукции, выходной Tok эталонной системы является опорным для измерительной системы уравновешивания l.
Недостатком этих весов является значительная погрешность, вызванная температруной нестабильностью.
Наиболее близкими к предлагаемому по технической сущности являются электромагнитные весы, содержащие чувствительный элемент с груэоприемной площадкой, систему подвески, преобразователь некомпенсации, систему электрического уравновешивания и отсчета, магнитную систему, измерительную катушку, эталонную катушку с заданной массой и источник тока уравновешивания тары 2.
Недостатком известных весов является ограничение по точности, вызванное погрешностью от дрейфа нуля, вносимой эталонной и измерительной системами уравноваиивания, причем дрейф нуля эталонной системы уравновешивания вызывает и погрешность чувствительности .
Цель изобретения - повьдиение точ0ности и надежности.
Указанная цель достигается тем, что весы устройством для электромагнитного наложения эталонной катушки с заданной массой, со5держащим командный блок, электронный ключ, эквивалентный резистор, источник тока коррекции и систему механических ограничителей хода, установленных иа магнитной системе и
0 на измерительной катушке, причем эталонная катушка расположена в зазоре магнитной системы между ограничителями хода и подключена вместе с эквивалентным резистором к источнику
5 тока коррекции через электронный ключ, соединенный с командным блоком.
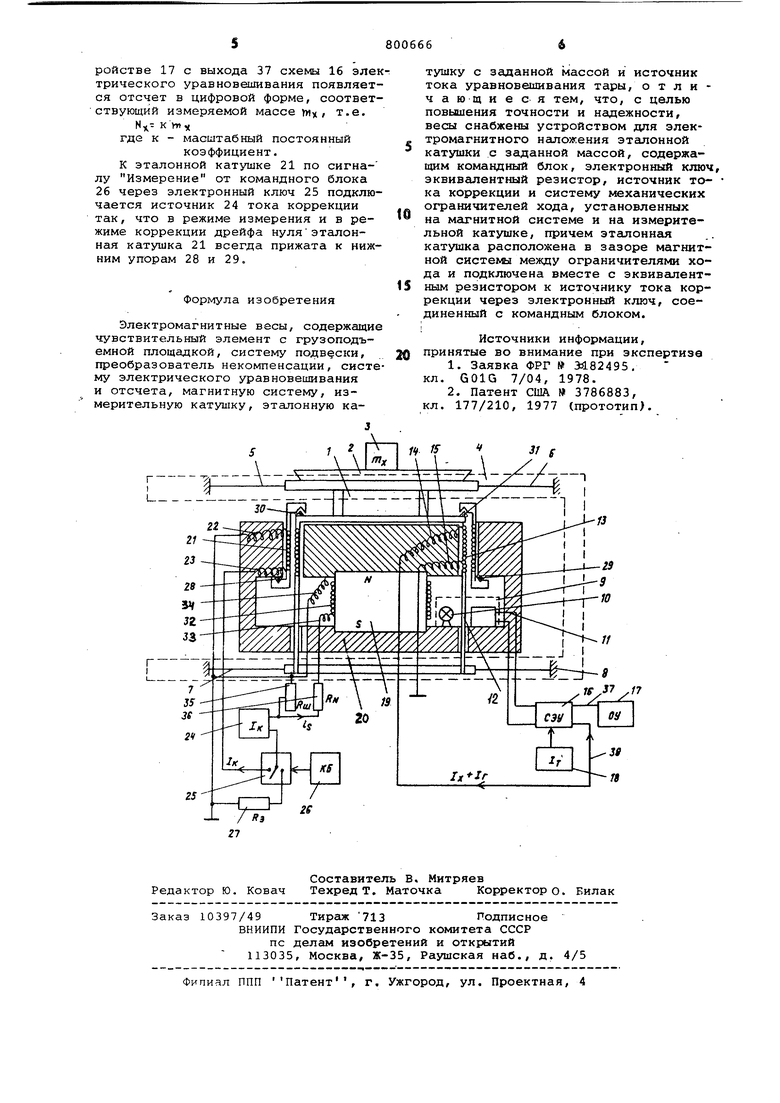
На чертеже схематически изображены электромагнитные весы.
Весы содержат чувствительный эле0мент 1 с гоузоприемной площадкой 2 для измеряемого груза 3 с массой ту, систему 4 подвески, содержащую растяжки 5-8, преобразователь 9 некомпенсации, выполненный, например, в вице источника 10 света, фотоприемника 11, щелевой дифрагмы 12, сделан ной в каркасе измерительной катушки 13 с токоподводами 14 и 15, систему 16 электрического уравновешивания и устройство 17 отсчета, источники 18 тока OT уравновешивания тары, постоянный магнит 19, магнитопровод 20, составл Гющие магнитную систему 19-20, эталонную катушку 21 с заданной массой с токоподводами 22 и 23, устройство электромагнитного наложения эталонной катушки 21 заданной массы, содержащее источник 24 тока Эц коррекции, электронный ключ 25, командный блок 26, эквивалентный резистор 27, систему механических ограничителей хода, содержащую упоры 28-31, намагничивающую катушку 32 с токоподводгили 33 и 34, резисторы 35 и 36, обозначенные RUJ и R,,, необходимые для регулировки чувствительности обратного преобразователя (пре образователя тока в силу, образованного измерительной катушкой 13 и магнитной системой 19-20) путем изменения в катушке 32 токат. Конструктивно чувствительный , элемент 1, грузоприемная площадка 2 и измерительная катушка 13 жестко соединены друг с другом. Измеритель ная катушка 13 крепится к основанию с помощью систекы 4 подвески, содер жащей о«стяжки Б-8. Эталонная катушка 21 заданной ма сы Wo(npM постоянном ускорении силы тяжести ( заданный вес эталонной катушки определяется какРо- оЧ находится в поле постоянного магнит 19 и расположена параллельно измери тельной катушке 13 между системой механических ограничителей хода,со держащей упоры 28-31, которые фикси руют ее положение в зазоре. Система 16 электрического уравновешивания имеет выход 37, соединенный со входом отсчетного устройства 17 и выход 38, соединенный через токопрово 14 с измерительной катушкой 13. Весы работают следующим образом. При отсутствии измеряемого груза 3ji с массой . I т.е. при , по измерительной катушке 13 с общей длиной провода Ьр , находящейся в по постоянного магнита 19 с индукцией Be от постоянного источника 18 тока тары, систему 16 электрическо го уравновешивания с ее выхода 38, протекает начальный ток 3т тары, который создает усилие равн весу .тары Р - F- В этом случае при отсутствии дрейфа измерительная катушка 13, щелевая диафрагма 12 Hcixo дятся в нулевом нейтральном положении , при котором сигнал с преобразо вателя 9 некомпенсации равен нулю, на выходе 37 системы 16 электрического уравновешивания сигнал также равен нулю и- на отсчетном устройстве 17 - нулевое показание, в случае дрейфа нуля при отсутствии груза 3 на выходе 37 появляется сигнал следовательно на отсчетном устройстве 17- некоторое , отличное от нулевого, показание , „ N --KAViij,, где К - .постоянный масштабный коэффициент. В этом случае осуществляется коррекция дрейфа нуля путем регулировки тока 3т, подаваемого от источника 18тока- тары до установления нулевых показаний на отсчетном устройстве 17. В режиме по сигналу от ко-, мандного блока 26 электронный ключ 25 подключает источник 24 коррекции к эталонной катушке 21. Этот ток создает усилие РО-ВО Ток рц эталонной катушки .i21 имеет величину, достаточную для взвешивания веса Pf, эталонной катушки 21, т.е. O- S. Таким образом, эталонная катушка 21 находится в крайнем верхнем положении, поджатая к фиксирующим упорам 28 и 29 усилием FO. После взвешивания тары и коррекции дрейфа нуля с командного блока 26по сигналу Коррекция чувствительности источник 24 тока коррекции с помощью электронного ключа 25 подключается к эквивалентному резистору 27СТ э) t включенному параллельно эталонной катушке 21, и обесточенная катушка 21 за счет собственного веса РО опускается на упоры 30 и 31, расположенные на измерительной катушке 13. Таким образом, на чувствительный элемент 1 подается калибровочное усилие РО, которое уравновешивается силой создаваемой током ЗоOpQ- -37 с выхода 37 системы 16 электрического уравновешивания, а на отсчетном устройстве 17 появляется значение, соответствующее калиброванному грузу РО (например, номинальное) . При наличии измеряемого веса чувствительный элемент 1 с грузоподъемной площадкой 2, измерительная катушка 13, щелевая диафрагма 12, т.е. вся подвижная часть весов сме1чается вниз и сигнал с выхода преобразователя 9.некомпенсации подается на систему 16 электрического уравновешивания, с выхода 38, которой сигнал подается в измерительную катушку 13. Ток в измерительной катушке 13 оказывается равным 3f,-OT + ik. Ток Зп создает усилие Рц-Ор ВдЬз уравновешиВсшяцее с точностью до величины некомпенсации Л.РП измеряемый вес Р, т.е. Р(. + а на отсчетном УСТ
