(54) УГЛОВОЙ ДИСКРИМИНАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОИМПУЛЬСНАЯ СИСТЕМА СО СВЕРХРЕГЕНЕРАТИВНЫМ ОТВЕТЧИКОМ | 2007 |
|
RU2368916C2 |
| КВАЗИМОНОИМПУЛЬСНЫЙ ВТОРИЧНЫЙ РАДИОЛОКАТОР | 2016 |
|
RU2622399C1 |
| ВЕРТОЛЕТНАЯ СИСТЕМА НАВЕДЕНИЯ ОРУЖИЯ | 2003 |
|
RU2230278C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| ОБНАРУЖИТЕЛЬ РАДИОИМПУЛЬСОВ | 1979 |
|
SU1840949A1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ ОТ ПАССИВНЫХ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1990 |
|
RU2237906C2 |
| СПОСОБ ДОПЛЕРОВСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2808775C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 2019 |
|
RU2714672C1 |
| АКУСТИЧЕСКИЙ ЭХОЛОКАТОР | 2002 |
|
RU2288484C2 |
| Фазовый пеленгатор | 2016 |
|
RU2618522C1 |
Изобретение относится к радиолокации и может использоваться для определения дальности объектов путем передачи импулЬсно-модулированных колебаний, в которых информация о дальности,, угле места и азимуге извлекаются из одного общего зондирующего импульса.
Известен угловой дискриминатор, содержащий фазированную антенную решетку (ФАР) из N приемных элементов, первый и второй сумматоры импульсов промежуточной частоты,выходы которых подключены к входам фазового дискриминатора, выход которого через блок управления фазоврщателями подключен к управляющим входам приемных элементов ФАР,блок задержки и амплитудный детектор lU
Однако в данном дискриминаторе наличие двухэтапного измерения угла прихода широкополосного сигнала приводит к снижению его быстродействия.
Цель изобретения - повышение быстродействия измерения угловых координат и обеспечение инвариантности по отношению к переизлученным сигналам с моделируемой амплитудой.
Указанная цель достигается тем, что в угловой дискриминатор, содержащий фазированную антенную решетку (ФАР) из N приемных элементов, первый и второй сумматоры импульсов промежуточной частоты, выходы которых подключены м входам фазового дискриминатора, выход которого через блок управления фазовращателями под0ключен к управляющим входам приемных элементов ФАР, блок задержки и амплиту 1ный детектор, введены два сумматора видеоимпульсов, N-1 дополнительных амплитудных детекто5ров и последовательно соединенные первый блок разности, ограничитель по максимуму, второй блок разности, ограничитель по минимуму, пиковый детектор и блок управления .антенной,
0 причем выходы первой и второй половин приемных элементов ФАР подключены к входаи первого и второго сумматоров импульсов промежуточной частоты и через амплитудные детекторы
5 соединены с входами первого и второго сумматоров. видеоимпульсов, выходы которых подключены к входгил первого блока разности, выход ограничителя по максимуму через блок
0 задержки подключен к второму входу второго блока разности, выход блока управления антенной подключен к ФАР.
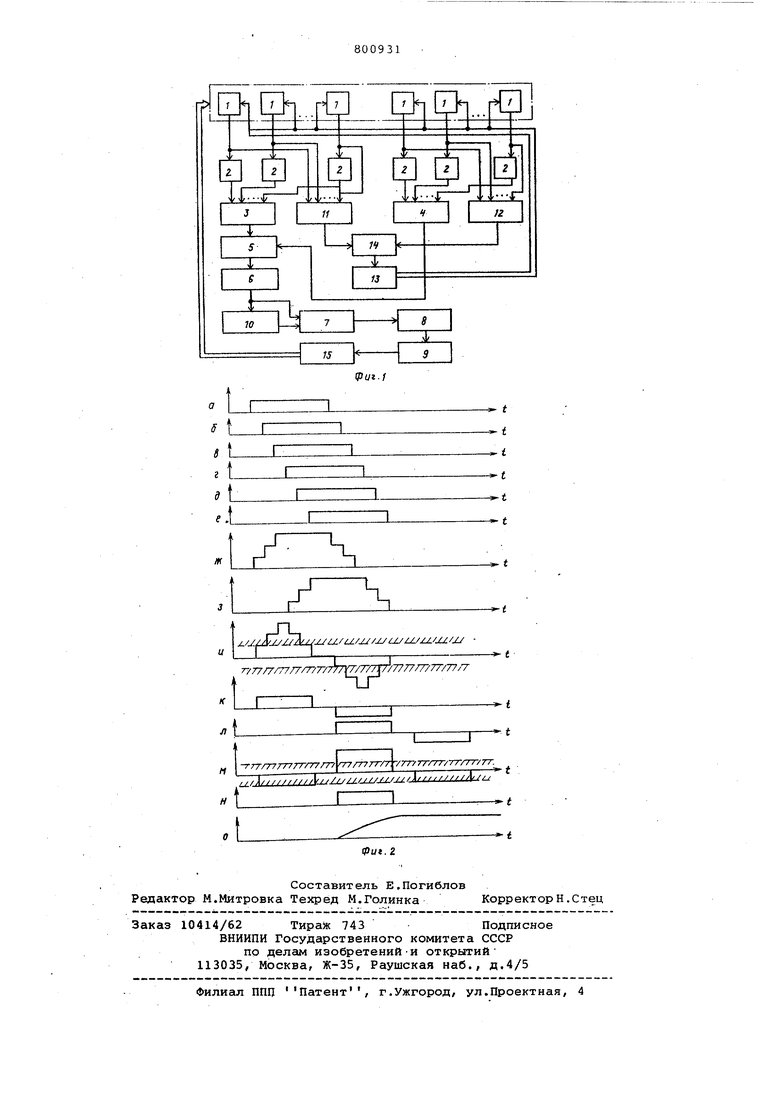
На фиг.1 представлена структурна электрическая схема предлагаемого дискриминатора; на фиг.2- временные диаграммы, поясняющие его рабоРУ.
Дискриминатор содержит фазированную антенную решетку из 2 N приемных элементов 1, амплитудные детекторы 2, сумматоры 3 и 4 видеоимпульсов, первый блок 5 разности, ограничитель 6. по максимуму, второй , блок 7 разности, ограничительна по минимуму, пиковый .детектор 9, блок )О задержки, сумматоры 11 и 12 импульсов промежуточной частоты, блок 13 управления фазовращателями, фазовый дискриминатор 14 и блок 15 управления антенной.
.Дискриминатор работает следующим образом.
Отражаемый от цели широкополосный сигнал принимается приемными элементами 1 ФАР, в которых производится усиление принимаемых сигналов на высокой частоте, перенос их на промежуточную частоту с соответствующим усилением в усилителе промажуточной частоты с автоматической регулировкой усиления (АРУ) и согласованная фильтрация сигналов. Радиосигналы с выходов первой половины приемных элементов 1 ФАР поступают на ВХОДЫ: сумматора 11 импульсов промежуточной частоты, и, продетактированные амплитудными детекторами 2, поступают на входы сумматора 3 видеимпульсов. Радиосигналы с выходов второй половины приемных элементов 1 ФАР поступают на входы сумматора 12 импульсов промежуточной частоты и, продетектированные амплитудными детекторами 2, поступают на входы сумматора 4 видеоимпульсов. Если направление прихода сигнала не совпдает с равносигнальным направлением (РСН)ФАР, то сигналы на выходах приемных элементов 1 отключаются ка в запаздаавании огибающих, так ив. начальных фазах. Сигналы на выходах амплитудных детекторов 2 для шестиэяёментной ФАР приведены на фиг.2а2е.
Рассмотрим сначала действие сисTJ s ttJ измерения угловой координаты по запаздыванию огибающих на выхода приемных элементов ФАР. Для получения дискриминационной характеристики по угловой информации, .заключенной LO времени запаздывания огибгиощих сигналов, принимаемых элементами 1 ФАР, производится суммирование огибающих сигнсшов с выходов первой половины ФАР (фиг.2ж) и огибающих сихналов, снимаемых с.о второй половины элементов ФАР {фиг.2з). Выходные сигналы сумматоров 3 и 4 видеоимпульсов подаются на входы блока 5 .разности и вычита- . ются (фиг.2и) . Разностный сИгнал с выхода блока 5 поступает на вход qгpaничитaля б по максимуму, который выполняет двухстороннее ограничение по максимуму (фиг.2и; уровень ограничения обозначен пунктиром) . Ограниченный сигнал (фиг.2к) с выхода ограничителя 6 по максимуму поступает на первь1й вход блока 7 разности непосредственно и на второй вход блока 7 через блок задержки 10, задержанный на длительность импульса tTu (фиг.2л) .
Блок 7 производит вычитание поступающих на его входы сигналов. Разностный сигнал с выхода блока 7 (фиг.2м) поступает на вход ограничителя 8 по минимуму, который выполняет двухстороннее ограничение поступающих на его вход сигналов по минимуму. Поррги ограниченияограничителя В по минимуму (на фиг.2м нанесены пунктиром) имеют такую же. величину, как и у ограничителя б по максимуму. Выходной сигнал ограничителя 8 (фиг.2н) имеет длительность, пропорциональную величине угла отклонения объекта от РСН ФАР, а его полярность зависит от направления отклонения относительно РСН ФАР. Далее для получения дискриминационной характеристик.и производится преобразование длительности импульса (фиг.2н), снимаемого с выхода ограничителя 8 в амплитуду напряжения. Такое преобразование осуществляе.тся пиковым детектором 9, который является выходным элементом дискриминатора, работающего по угловой информации, заключенной в запаздывании огибающих сигналов на выходах элементов 1 ФАР. Выходное напряжение пикового детектора 9 представлено на фиг.2о. Постоянная времени заряда пикового детектора 9 выбирается исходя из максимального заданного возможного угла прихода сигналао объекта. Такой выбор постоянной времени заряда пикового детектора 9 позволяет получить однозначную связь между углом прихода отраженного сигнала и величиной напряжения на выходе дискриминатора по запаздьзванию огибающих принимаемых элементами ФАР сигналов. Таким образом осуществляется моноимпульсное измерение угловой координаты . цели по угловой информации, заключенной во времени запаздывания огибающих принимаемых элементами 1 ФАР сигналов.
0 Длительность импульса, пол5 чаемого на выходе ограничителя 8 по минимуму, определяется так:
Г (N-l)d sin V/с, где N - количество приемных эламен5 тов в ФАР}
d - шаг ФАР;
- угол прихода сигнала от объекта относительно РСН ФАР; с - скорость света в воздухе. Тогда дискриминационная характеристика на выходе пикового детектора 9, при условии идеального интегрирования, имеет вид
.sina), где
(N-l)d/c .
Это дает возможность однозначно измерить координату моноимпульсным .методом в более широком угловом диапазоне,чем известное устройство.
Для получения информации об yi ловом положении цели, заключенной в разности фаз сигналов, принимаемой первой и второй половинами элементов 1 ФАР, сумма радиоимпульсов, снимаемых с первой половины элементов 1 ФАР и с выхода сумматора 11 импульсрв промежуточной частоты по ступает на первый вход фазового дискриминатора 14. На второй вход фазового дискриминатора 14 с выхо-. да сумматора 12 импульсов промежуточной частоты поступает сумма радиоимпульсов, снимаемых со второй половины элементов 1 ФАР. На выходе фазового дискриминатора 14, который может быть выполнен по любой из известных схем фазовых дис.криминато- . ров, получается дискриминационная характеристика по фазовому рассогласованию принимаемых первой и второй половинами элементов 1 ФАР сигналов
Совместное использование дискриминационных характеристик, получаемьтх на выходах фазового дискриминатора 14 и пикового детектора 9,дает возможность построить неследящий моноимпульсный измерит.ель угловой координаты объекта при широкополос8ык принимаемых сигналах, сохраняющий точность определения угловой координаты фазовым дискриминатором в широком диапазоне углов. Для слежения за изменением углового положения цели сигналы, снимаемые с вы;хода ограничителя 8 по минимуму/ поступают через пиковый детектор 9 на вход блока 15 управления антенной. Блок-15 осуществляет поворот ФАР так, чтобы компенсировать временное запаздывание огибающих сигнгшов, принимаемых элементс1ми 1 ФАР. Сигналы с выхода фазового дискриминатора 14 поступают на вход блока 13 управления фазовращателями. Блок 13 вырабатывает управляющие напряжения на управляемые фазовращатели приемных элементов 1 ФАР таким образом, чтобы компенсировать разность фаз сигналов, принимаемых элементами первой л второй половин ФАР.
В предлагаемом угловом дискриминаторе, по сравнеиию с известным,
не происходит затрат времени на перзвом этапе измерения угловой координаты и не тратится время на сканирование заданного сектора обзора с помощью изменения настройки линий задержки. Выигрыш во времени измерения зависит от величины углового сектора возможного появления объекта и точности априорных сведений относительно угла появления объекта. Угловой дискриминатор инвариантен
СГ к переизлученным сигналам с модулированной амплитудой, в то время как известное устройство на первом этапе грубого измерения угловой координаты - сканирования чувствительно к
5 переизлученному сигналу с модулированной .амплитудой, что приводит к существенным ошибкам в определении углового положения объекта.
0
Формула изобр ения
Угловой дискриминатор, содержащий фазированную антенную решетку (ФАР) из N приемных элементов, первый и
5 второй сумматоры импульсов промежуточной частоты, выходы которых подключены к входам фазового дискриминатора, выход которого через блок управления фазовращателями под0ключен к управляющим входам приемных элементов ФАР, блок задержки и амплитудный детектор, отличающийся тем, что, с целью повышения быстродействия измерения угло5вых координат и обеспечения инвариантности по отношению к переизлученным сигналам с модулируемой амплитудой, в него введены два сумматора видеоимпульсов, N-1 дополнительных
0 амплитудных детекторов и последовательно соединенные первый блок разности, ограничитель по максимуму, второй блок разности, ограничитель по минимуму, пиковый детектор и блок управления антенной, причем выходы
5 первой и второй ПОЛОВИН приемных элементов ФАР подключены к входам первого и второго сумматоров импульсов промежуточ|| ой частоты и через амплитудные детектдры соединены с
0 входами первого и второго сумматоров видеоимпульсов, выходы которых подключены к входам первого блока разности, выход ограничителя по максимуму через бло задержки подключен
5 к второму йходу второго блока разности, выход блока управления антенной подключен к ФАР.
Источники информации, 0 принятые во внимание при экспертизе
Л/
jL/y.fjSi2/2/2.
MLLiJ./ /-L/LL//UJ22./JjL/JJ
7777/ /77/7/7777:
t
777Г7ГГ/7Т/77ГГ
