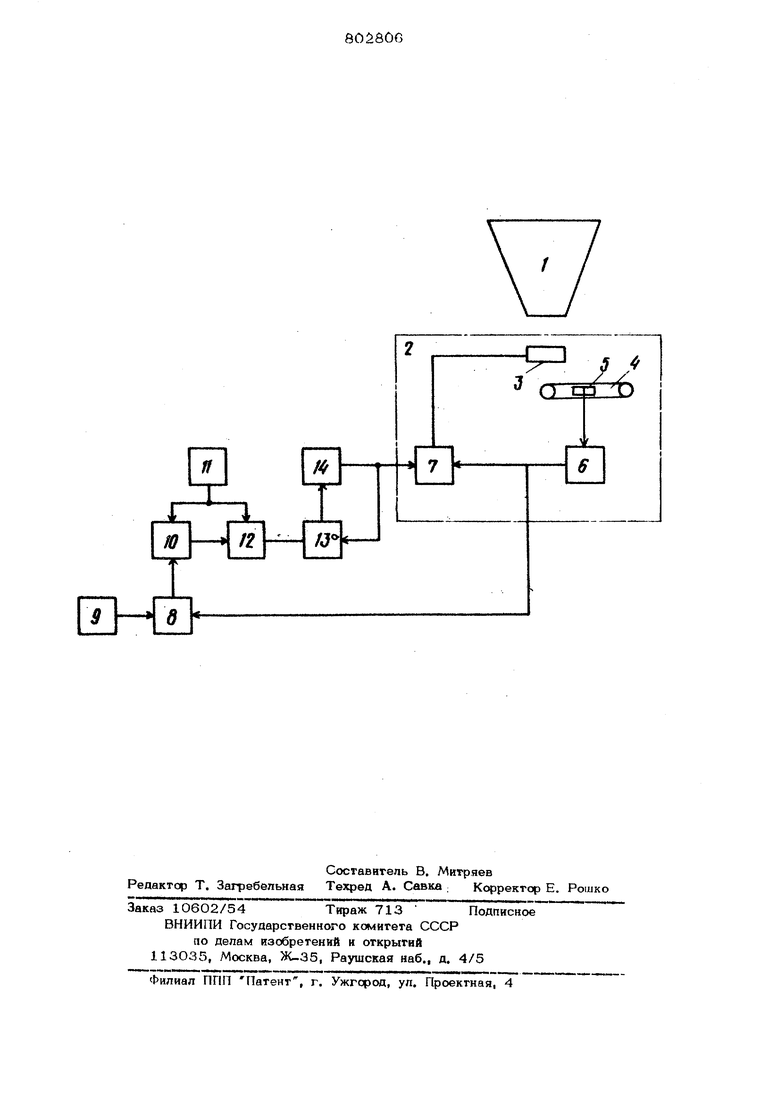
Изобретение относится к области автоматизации процессов в металлургической промышленности, преимущественно к автоматизации процессов дозирования в агломерационном производстве, и может быть применено, например, при дозировании компонентов агломерационной шихты. Изобретение может найти применение и на предприятиях других отраслей промышленности, где имеет место дозирование сыпучих материалов. Известен способ и устройство для его реализации, заключающийся в регулировании весового расхода материала в зависимости от сигнала рассогласования lj. Основным недостатком известного способа и устройства является наличие ошибки, связанной с динамикой прс«есса дозирования материалов. Наиболее близким по технической сущноств, -к описываемому изобретению является способ весового дозирования сыпучего материала, заключающийся в опре делении фактичпского весового расхода материала, сравнивании его с заданным и регулировании расхода материала по отклонению, при этом устройство для его реализации содержит весовсА дозатор, включающий в себя последователЕло соединенные весоизмеритель, датчик веса, усилитель, регулятор и питатель, блок сравнения, задатчик расхода, блок усреднения, вход которого соединен с выходом блсжа сравнения, первый вход которого соединен с выходом задатчика расхода, а второй - с выходом усилителя 2. Недостапсом известного способа и ус«ройства для его реализации является наличие ошибки, обусловленной динамик Л аозирования сыпучего материала. Целью изобретения является повышение точности дозирования. Для достижения этого значения сигва- лов регулирования и отклонения расхода материала фиксируют дискретно, прячем интервал дискретности принимают равным времени переходного процесса регулирования, а расход материала регулируют opопорциовально значению ожидаемого в каждый следующий дискретный интервал времени отклонв1{ия расхода материала, догорое определшот по формуле ,. J-(b,X.{b2Xvi -M g ожидаемое в следующий дискретный интервал времени отклоне иие расхода материала; фиксируемые отклонения расхода материа ла; фиксируемые значения ЧчЧ-2 -Чсигналов регулирова/),и.,.)р,( .. параметры, определяе..gмые при построении модели процесса весового дозирования мате риала при помощи известных методов стохастической идентификации и зависящие от параметров материала и дозатора, а э устрсЛство введены вьгчислйтельный блсж, блок памяти, ключевой элемент и тактсшых импульсов, при этом выход генератс а соединен с входом 6i9)ка ус еияения и с входом ключевого элемента, второй вход которого соединен с выходом блока усреднения, а выход - с входом блока памяти, выход которого соединен с входом вычислительнся о блок выходом соединенного с фугим входом блока памяти и вторым входом регулятор На чертеже схематически изображено устройство, реализующее способ, Устройство состоит из бункера 1, весового дозатора 2, содержащего питател 3, весоизмеритель 4, датчик веса 5, ус литель 6, регулятор 7, блока сравнения 8, задатчика расхода 9, блока усреднения 1О, генератора 11 тактовых импуль сов, ключевого элемента 12, блока памя ти 13, состоящего из четырех Р-разряд ных регистров, вычислительного блока 1 Выход датчика веса 5 соединен с вхо дом усилителя 6, выход которого псщклю чен к входу регулятора Тик входу бл ка сравнения 8, чгугой вход которого подключен к выходу задатчика расхода 9 а выход подключен к входу блока усреднения 10, к другому входу которого под ключен вькод генератора 11 тактовых импульсов , а выход подключен к вхоку ключевого элемента 12, к другому вхо у которого подключен выход генератора 11 тактовых импульсов, а вькод подклюен к входу блока памятя 13, выход коорого подключен к выходу-вычислителього блока 14, выход которого подключен другому входу блска памяти 13 и к друому входу регулятора 7, выход которого одключен к входу питателя 3. Реализация способа и работа устройста осуществляются следующим образом. Весоизмеритель 4 производит взве-, ивание дозируемого материала, вьщаваеого из бункера 1 с помощью питателя , Выходной сигнал датчика веса 5, проордиональньй расходу дозируемого матеиала, усиленньй усилителем 6, сравниватся в блсже сравнения 8 с сигналом заатчика расхода 9. Сигнал рассогласования, соответствующий отклонения расхода материала от заданной величины, поступает на вход блсяса усреднения 10. Время усреднения равно интервалу времени между двумя соседними единичными импульсами, поступающими с генератора 11 тактсжых импульсов. Этот интервал подбирается равным постоянной времени весового дозатора 2. Усредненный сигнал рассогласования поступает на вход ключевого элемента 12. В момент fe поступления с тактового генератора 11 очередного единичного импульса происходит вскрытие ключевого элемента 12. Значение очередного усредненного сигнала рассогласования после сдвига, содержимого первого регистра блока памяти 13, при котором значения дискретного ряда yqэeднeнныx сигналов хранящихся соответственно в ячейках 1, 2...... р, переписьшаются соответственно в ячейки 2,3 ... р+1, а значение стирается, записьтается в ячейке 1. После запоминания в блсж.е памяти 13 значения очередного усредненного сигнала рассогласования , , все pi-1 значений дискретного ряда сигналов рассс ласова ния, хранящихся в первом регистре, а также значений дискретного ряда сигналов коррекции задания, хранящихся во втором регистре, передаются в вычислительный блок 14, туда же передаются данные параметров , od vjpo Рч ( g , записанные в третьем и четвертом регистрах. Общее число р+1 значений дискретного ряда усредненных сигналов рассогласования и общее число rf значений дис кретного р5ша сигналов коррекции задания опреДел$потся характеристиками весового дозатора и физическими свойствами дозируемого материала, в общем случае Р(р+1, П ). В вычислительном блоке 14 вычисляется сигнал коррекции задания X i по формулеН А ,(A44(a4- -- PgH-g, гдеС4. и величина ожидаемого к следующему дискретному моменту времени отклонения расхода дозируемого материала от заданного значения; , ,, ,...,, р- значения ряда усреднен ных сигналов рассогласования;. л значения ряда сигналов . fu коррекции задания; р параметры, зависящие от физических свойств дозируемого материала Из блока 14 сигнал К подается на задающий вход регулятора 7, где сравнив ется с выходным сигналом датчика веса Формула изобретения 1.Способ весового дозирования сыпучег матернала.при котором определяют фактиче ский весовой расход материала, сравнивают его с заданным и регулируют расход материала по отклонению, отличаю щийся тем, что, с целью повышения точности дозирования и значения сигналов регулирования, отклонения расхода материала фиксируют дискретно, причем интер вал дискретности принимают равным врел менн переходного процесса регулирования а расход материала регулируют пропорцисжально значению ожидаемого в каждый следующий дискретный интервал времени отклонения расхода материала, которое определяют по форксуле .t4,(S :H - ° pei-0 , 6 6 - ож шаемое в следующий дискретный интервал времени г .клонение расхода материала; i,j ,..,, - фиксируемые отклонения расхода материала;- фиксируемые зна4-1«4-2- iчения сигналов рв ot l ) гулнрования; ,.. , заданные коэффициенты, определяемьЕе свс 1ствами маге риала и дозирую щего устройства; р л - заданные целые числа. 2. Устройство для реализации способа по п. 1, ссщержащее весовой дозатор, включающий в себя последовательно соединенные весонзмеритель, датчик веса,, усилитель, регулятор и питатель, блок сравнения, задатчик расхода, блок усреднения, вход которого соединен с вькодсм блока сравнения, первый вход которого соединен с выходом задатчика расхода, а второй - с вьсходом усилителя, отличающееся тем, что в него введены вычислительный блок, блок памяти, . ключевой элемент и генератор тактовых импульсов, при этом выход генератора соединен с входом блока усреднения и с входом ключевого элемента, второй;вход которого соединен с выходом блока усреднения, а выход - с входом памяти, выход которого соединен с входом вычио пктельного блока, соединенного выходе с другим входом блока памяти и вторым входом регулятора. Источники инфсчэмации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР hfe 590611, кл. ( 01 q 11/04, 1976. 2.Авторское свидетельство СССР N9 453585, кл, Q О1 Q 23/36, 1972 (прототип).
p
16
rrqa
| название | год | авторы | номер документа |
|---|---|---|---|
| Весовой дозатор непрерывного действия | 1984 |
|
SU1174769A1 |
| Весовой дозатор непрерывного действия | 1984 |
|
SU1236320A1 |
| Весовой дозатор непрерывного действия | 1982 |
|
SU1059443A1 |
| Устройство управления весовым дозатором | 1977 |
|
SU673993A1 |
| Устройство для дозирования компонентов шихты | 1979 |
|
SU866544A1 |
| Весовой дозатор непрерывного действия | 1985 |
|
SU1265486A1 |
| Весовой дозатор непрерывного действия | 1979 |
|
SU792082A1 |
| Устройство для управления весовым дозатором | 1984 |
|
SU1272313A1 |
| Автоматический комбинационный весовой дозатор | 1988 |
|
SU1654674A1 |
| Способ управления процессом весового порционного дозирования сыпучих материалов | 1987 |
|
SU1500852A1 |
/
ff
JL
/j
