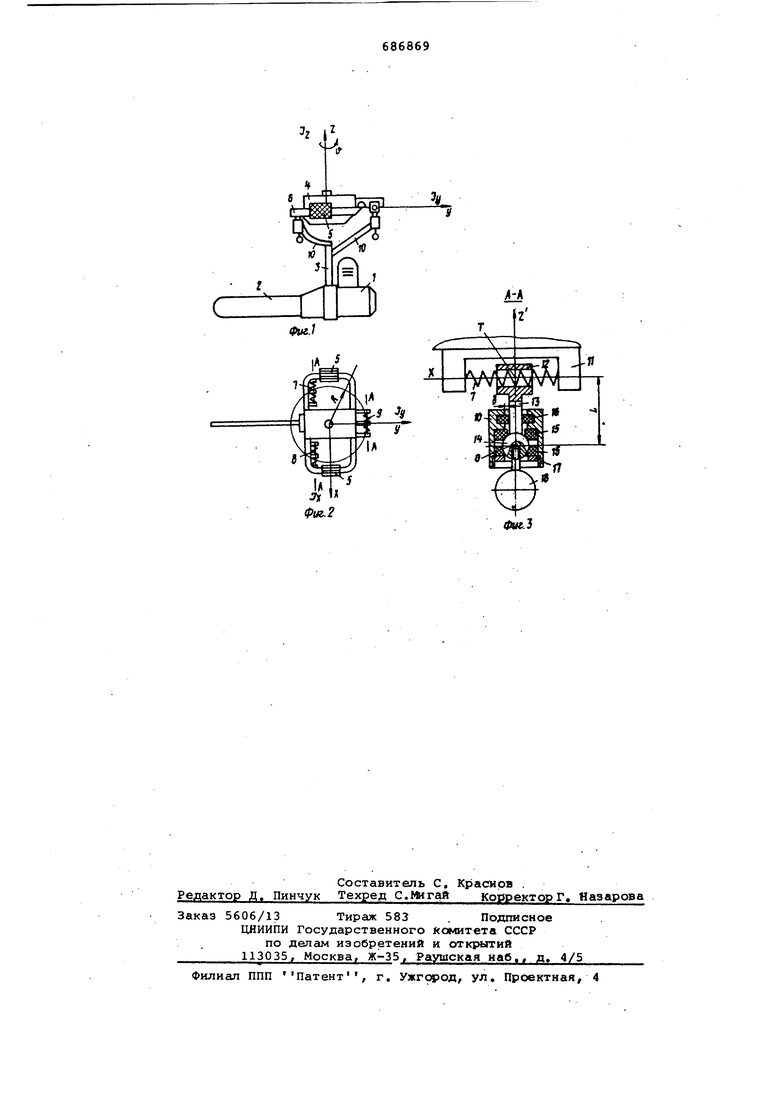
изобретение относится к ручным механизированным инструментам и мажет быть использовано в лесной и деревообрабатывающей промьишенности. Из основного авт. св. № 625926 известна переносная моторная пила -включающая двигатель, пильный аппарат, стойку с проушинами, бензобак и рукоятки управления, жестко соединенные в опорную раму, связанную с проушинс1ми стойки при помощи цилиндрических пружин, концы которых жестко закреплены в кронштейнах опорной рамы, средние витки жестко закреплены во втулках, соединенных с проушинами, стойки при помопр сферических , центры которых располсисены ниже осей втулок, причем поверхность сферического шарнира, сопряженная с проушиной стойки, покрыта полимерным материалом. Рукоятки такой мотопилы имеют недостаточную виброизоляцию на режимах рабочего и холостого хода. Цель изобретения - повышение виброизоляции рукояток управления на ре жимах рабочего и холостого хода. Для этого каждый шарнир соединен со втулкой посредством стержня, кото рый снабжен противовесом, установлен ным ниже сферического шарнира по оси стержня так, что общий центр тяжести стержня, втулки и противовеса совмещен с центром сферического шарнира, причем шарниры расположены горизонтально по окружности, радиус которой равен радиусу инерции опорной рамы, а центр расположен на вертикальной оси, проходящей через центр тяжести сяюрной рамы. На фиг. 1 изображена переносная моторная пила, общий вид; на фиг.2 то же, план; на фиг. 3 - разрез А-А на фиг. 2. Переносная моторная пила состоит из двигателя 1 с жестко со-эдиненным пильным аппаратом 2 и стойкой 3. Бензобак 4 и рукоятки управления 5 жестко соединены в опсфную раму 6, имеющую главные центральные оси .инерции 3 г ЗУ f z Равнсисесткие упругие элементы 7, 8, 9 выполнены в виде винтоя х цилиндрических пружин и установлены между опорной рамой 6 и проушинами 10 стойки 3 так, что главные центральные оси жесткости систе « упругих элементов X, У, Z совпадают с осями tJjj , ЗУ , DJ . Концы пружин жестко закреплены в кронштейнах 11 опорной рамы 6. Втулки 12 жестко
соединены со средними витками упругих элементов 7, 8, 9 и с помощью стержней 13 со сферическими шарнирами 14. Центры О шарниров 14 смещены с Осей Х-Х втулок 12 вниз по вертикальной оси z.
Между сферическими шарнирами 14, стержнями 13 и проушинами 10 установлены соответственно сухари 15 из антифрикционного материала, например, фторопласта, и кольцо 16 из полимерного материала, например, резины. Сухари 15 поджимаются к поверхности сферического шарнира гайкой 17. Каждый стержень 13 снабжен противовесом 18, установленным ниже сферического шарнира 14 по оси стержня так, что общий центр тяжести стержня 13 втулки 12 и противовеса 18 совмещен с центром шарнира 14, Центры шарниров расположены горизонтально по окружности, радиус которой R равен радиусу инерции опорной 6 относительно вертикальной оси Z, а центр расположен на вертикальной оси Z, проходящей через центр тяжести опорной рамы 6,
Работает пила следующим образом.
На режимах рабочего хода к рукояткам рамы прикладываются управляющие усилия, что приводит к деформации кольца 16 и выбору зазора между проушинами 10 и стержнями 13.. Проушины 10 стойки 3, стержня 13 и втулки 12 практически становятся жестко соединенными элементами, передающими пространственную вибрацию на рукоятки рамы через упругие элементы 7, 8, 9. Совмещение главных центральных осей инерции опорной рамы 3 , ЗУ , 3; с главными центральными осями жесткости системы упругих элементов X, У, Z и выполнение их равножесткими приводит к существенному сужению спектра собственных частот систеки, увеличению отстройки системы от резонансов на режимах рабочего хода. Совмещение центра тяжести втулки 12, стержня 13 и противовеса 18 с центром О шарнира 14 приводит к существенному увеличению собственных частот каждого стержня на упругом элементе, устранению резоцансов стержней на режимах рабочего хода и повышению эффективности вибр;оизоляции рукояток на этих режимах JЗамыкание втулок и проушин обеспечивает хорсшую управляемость исполнительным механизмом на этих режимах,
На режимах холостого хода мотопила удерживается за рукоятки 5, а стержни 13 занимают вертикальное положение, совпадающее с направлением оси 2 , Между стержнями 13 и проушиНё1Ми 10 образуется расчетный зазор . Смещение проушины 10 в горизонтальной плоскости под действием
горизонтальных составляющих вектора пространственной вибрации двигателя приводит практически к. смещению только центров шарниров О в горизонтальной плоскости, а центры 1 втулок 12 практически остаются неподвижными, т,е, осуществляется маятниковая подвеска рамы в горизонтальной плоскости.
Расположение центров О шарниров 14 на окружности, радиус R которой равен радиусу инерции р, опорной рамы б относительно вертикальной оси Z приводит к равенству собственных частот линейных колебаний рамы вдоль осей X и У собственной частоте угловых колебаний V раг«д относительно оси Z, что дополнительно сужает спектр собственных частот рамл на режимах холостого хода до
трех. Собственные частоты линейных X, У и угловых У колебаний определяются
сп ДР (
где L - длина маятника.
Это приводит к существенному снижению уровня вибрации на входе в упругие элементы 1, 8, 9 и, как следствие, к повышению эффективности виброизоляции рукояток в горизонтальной плоскости на режимах холостого хода. Канал передачи вертикальной вибрации по оси Z при этом остается без изменения, но поскольку уровень вибрации от двигателя в этом направлении на холостом ходу незначителен, то ухудшения виброизоляции в этом направлении не происходит. Выполнение сухарей 15 из фторопласта позволяет уменьшить трение в шарнирах 14 и их износ,
изобретения
Переносная моторная пила по.
авт. ев, 625926, отличающаяся тем, что, с целью повышения виброиэоляции рукояток управления на режимах рабочего и холостого хода, каждый шарнир соединен со втулкой посредством стержня, который снабжен противовесом, установленным ниже сферического шарнира по оси стержня так, что общий центр тяжести стержня, втулки и противовеса совмещен с центром сферического шарйира, причём шарниры расположены горизонтсшьно по окружности, радиус которой равен радиусу инерции опорной рамы, а центр расположен на вертикальной оси, проходящей через
центр тяжести опорной peuOJ,
Л Фиг.2
.3
| название | год | авторы | номер документа |
|---|---|---|---|
| Переносная моторная пила | 1980 |
|
SU939187A1 |
| Переносная моторная пила | 1987 |
|
SU1475782A2 |
| Переносная моторная пила | 1982 |
|
SU1027029A2 |
| Переносная моторная пила | 1986 |
|
SU1359114A1 |
| Переносная моторная пила | 1991 |
|
SU1801743A1 |
| Переносная моторная пила | 1981 |
|
SU939188A1 |
| Переносная моторная пила | 1987 |
|
SU1412947A1 |
| Переносная моторная пила | 1978 |
|
SU683907A1 |
| БЕНЗИНОМОТОРНАЯ ПИЛА | 1996 |
|
RU2109624C1 |
| Переносная моторная пила | 1975 |
|
SU541665A1 |