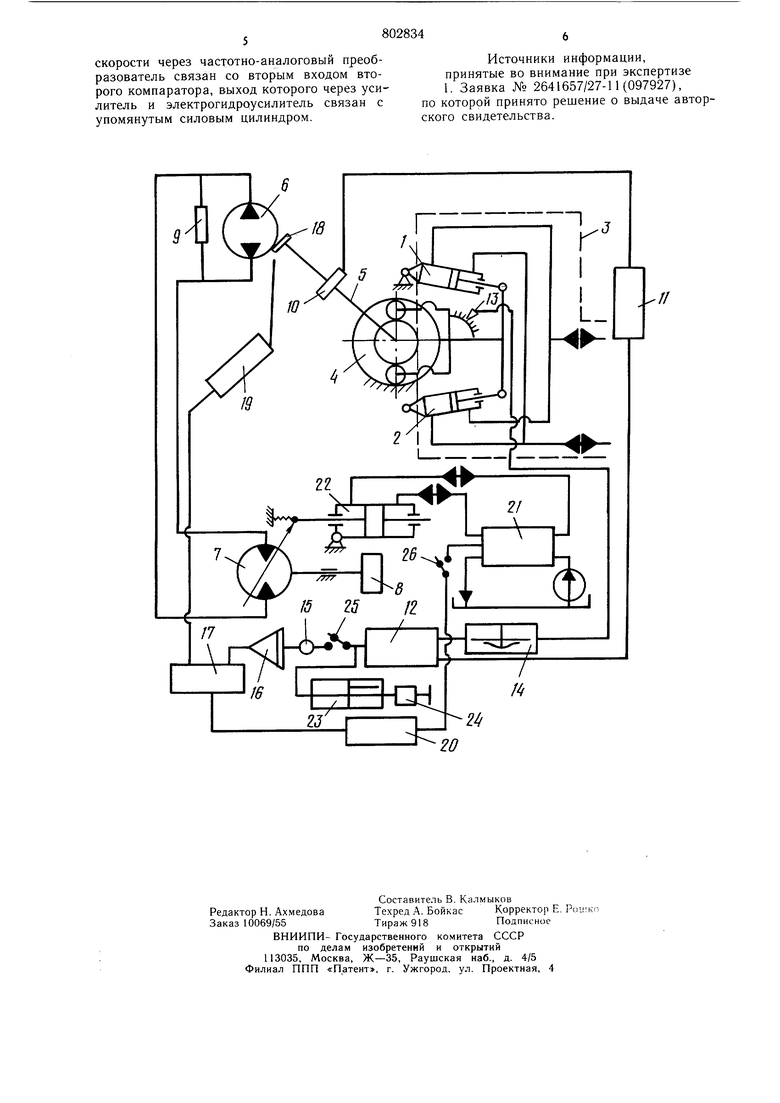
Изобретение касается испытаний гидравлических механизмов поворота, например систем поворота сочлененных машин. Известен стенд для испытания рулевых механизмов, содержащий гидромотор с установленным на его валу маховиком, реверсивный гидронасос, кинематически связанный посредством упругого вала с планетарным редуктором и с гидроцилиндрами испытуемого рулевого механизма и гидравлически соединенный с упомянутым гидромотором, причем последний выполнен регулируемым по расходу, посредством силовогоцилиндра, шток которого связан с регулируюш,им органом гидромотора 1. Недостатком данного стенда являются большие энергетические затраты при проведении испытаний. Целью изобретения является устранение отмеченных недостатков, а именно - уменьшение энергетических затрат при проведении испытаний. Указанная цель достигается тем, что стенд снабжен датчиком момента, установленным на упругом валу и системой управления, состоящей из блока выработки модуЛЯ момента, первого и второго компараторов, блока определения нелинейности момента, сопротивления повороту, устройства для набора коэффициента, обратно пропорционального эквивалентной инерционной массе поворота, интегратора, частотно-аналогового преобразователя, усилителя, электрогидро; усилителя и датчиков угла поворота и угловой скорости вала гидронасоса, причем датчик момента через блок выработки модуля момента соединен с одним из входов первого компаратора, датчик угла поворота через блок определения нелинейности связан со вторым входом первого компаратора, выход которого через устройство для набора коэффициента и интегратор связан с одним из входов второго компаратора, а датчик угловой скорости через частотно-аналоговый преобразователь связан со вторым входом второго компаратора, выход которого через усилитель и электрогидроусилитель связан с упомянутым силовым цилиндром. На чертеже изображена обихая схема стенда для испытания рулевых механизмов. Гидроцилиндры поворота 1 и 2 рулевого механизма посредством кинематической связи 3 соединены через планетарный редуктор 4, упругий вал 5 с гидронасосом 6, гидравлически связанным с регулируемым гидромотором 7, на валу которого установлен маховик 8. Гидросистема снабжена системой подпитки 9. На. упругом валу 5 установлен датчик момента 10, связанный через блок выработки модуля момента 11 с одним из входов первого компаратора 12, датчик угла поворота 13 через блок определения нелинейности 14 момента сопротивления повороту связан со вторым входом первого компаратора 12, выход первого компаратора 12 через устройство для набора коэффициента 15, обратно пропорционального эквивалентной массе поворота, и интегратор 16 связан с одним из входов второго компаратора 17, датчик угловой скорости 18 вала гидронасоса 6 через частотно-аналоговый преобразователь 19 связан со вторым входом второго компаратора 17, выход компаратора 17 через усилитель 20 соединен с электрогидроусилителем 21, который гидравлически связан с силовым гидроцилиндром 22, шток которого кинематически связан с регулирующим органом гидромотора 7.
Для обеспечения работоспособности стенда выход первого компаратора 12 связан со входом спецнелинейности 23, выход которой связан с управляющей обмоткой реле 24, а контакты реле 25 и 26 включены в цепь входа интегратора 16 и в цепь электрогидроусилителя 21.
При повороте руля в одну или другую сторону рабочая жидкость передвигает щтоки гидроцилиндров 1 и 2, которые, взаимодействуя через планетарный редуктор 4 с упругим валом 5, поворачивают его. Сигнал от датчика момента 10 через блок выработки модуля момента 11 поступает на один из входов первого компаратора 12, сигнал от датчика угла поворота 13 через блок определения нелинейности 14 момента сопротивления повороту поступает на второй вход первого компаратора 12. Сигнал от первого компаратора 12 через устройство для набора коэффициента 15, обратно пропорционального эквивалентной массе поворота, поступает на интегратор 16.
Сигнал от интегратора 16 поступает на один из входов второго компаратора 17, сигнал от датчика угловой скорости 18 через частотно-аналоговый преобразователь 19 поступает на второй вход второго компаратора 17. Результат сравнения реальной и задаваемой угловых скоростей на выходе второго компаратора 17 подается через усилитель 20 на электрогидроусилитель 21. Электрогидроусилитель 21 в соответствии с сигналом рассогласования посредством силового гидроцилиндра 22 увеличивает или уменьшает значение момента инерции на валу гидронасоса. В связи с этим испытываемый рулевой механизм воспринимает
реальные суммарные нагрузки, полученные отдельно от моментасопротивления и от инерционного сопротивления, исходя из общеизвестного принципа суперпозиции. Значение, момента инерции маховика 8, соотношение производительности гидромотора 7 и гидронасоса 6 обеспечивает соответствуюш,ий момент инерции. Согласно закону сохранения момента инерции, скорость вала гидронасоса 6 будет уменьшаться или увеличиваться.
Так как после зафиксированного положения гидроцилиндров поворота 1 и 2 сигнал от датчика момента 10 может быть меньше момента сопротивления, то на электрогидроусилитель 21 поступает ложный сигнал. В связи с этим при помощи первого компаратора 12, спецнелинейности 23, управляющего реле 24 и его контактов 25 и 26 ложный сигнал исключается.
Использование изобретения позволяет создать на стенде реальные инерционные и поворотные нагрузки простым изменением инерционной нагрузки. Таким образом стенд обеспечивает универсальность испытаний рулевых механизмов.
Формула изобретения
Стенд для испытания рулевых механизмов, содержащий гидромотор с установленным на его валу маховиком, реверсивный гидронасос, кинематически связанный посредством упругого вала с планетарным редуктором с гидроцилиндрами испытываемого рулевого механизма и гидравлически соединенный с упомянутым гидромОтором,
причем последний выполнен регулируемым по расходу, посредством силового цилиндра, шток которого связан с регулирующим органом гидромотора, отличающийся тем, что, с целью уменьшения энергетических затрат
при проведении испытаний, он снабжен датчиком момента, установленным на упругом валу, и системой управления, состоящей из блока выработки модуля момента, первого и второго компараторов, блока определения нелинейности момента сопротивления
повороту, устройства для набора коэффициента, обратно пропорционального эквивалентной инерционной массе поворота, интегратора, частотно-аналогового преобразователя, усилителя, электрогидроусилителя и
датчиков угла поворота и угловой скорости, вала гидронасоса, причем датчик момента через блок выработки модуля момента соединен с одним из входов первого компаратора, датчик угла поворота через блок определения нелинейности связан со вторым
входом первого компаратора, выход которого через устройство для набора коэффициента и интегратор связан с одним из входов второго компаратора, а датчик угловой
скорости через частотно-аналоговый преобразователь связан со вторым входом второго компаратора, выход которого через усилитель и электрогидроусилитель связан с упомянутым силовым цилиндром.
Источники информации, принятые во внимание при экспертизе 1. Заявка № 2641657/27-11(097927), по которой принято решение о выдаче авторского свидетельства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания рулевых механизмов транспортных средств | 1985 |
|
SU1280376A1 |
| Стенд для испытания рулевых механизмов | 1977 |
|
SU657310A1 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
| Способ усталостных испытаний лопастей воздушного винта и установка для его осуществления | 2021 |
|
RU2767594C1 |
| Стенд для испытания рулевого управления автомобиля | 1981 |
|
SU1026033A1 |
| Моделирующий комплекс для отладки системы управления автономным подвижным объектом | 2017 |
|
RU2662331C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ТРАНСМИССИЙ МАШИН | 2013 |
|
RU2539245C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ЭЛЕМЕНТОВ ГИДРОАГРЕГАТА РУЛЕВОГО УПРАВЛЕНИЯ | 2000 |
|
RU2173414C1 |
| Стенд для испытания рулевых механизмов | 1978 |
|
SU706734A1 |
| Стенд для испытания буровых машин | 1988 |
|
SU1645491A1 |
V/
