(54) СИСТЕМА АВТОМАТИЧЕСКОЙ СТАБИЛИЗАЦИИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| Релейный регулятор | 1990 |
|
SU1836658A3 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| Устройство для автоматического управления | 1980 |
|
SU868699A2 |
| Система автоматического управления периодическим процессом ферментации | 1989 |
|
SU1666538A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| КАСКАДНАЯ ДВУХКАНАЛЬНАЯ САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО УПРАВЛЕНИЯ | 2006 |
|
RU2327196C1 |
Изобретение относится к автоматике и может быть использовано для обеспечения качественной стабилизации регулируемой координаты при существенном ограничении скорости пере кладки регулирующего органа и широком Диапазоне изменения параметров внешнего возмущения, в частности, дл автоматической стабилизации судна на подводных крыльях. Относящиеся к классу релейных сис .тем автоматической стабилизации, в которых регулирующий орган отклоняется с постоянной (максимально возможной ) скоростью известны Наиболее близкой по технической сущности к изобретению является известная релейная система автоматической стабилизации, содержащая последовательно соединенные датчик ошибки регулируемой координаты, парвый и второй сумматоры, сервопривод объект регулирования и датчик произ водной регулируемой координаты, выхо которого соединен с вторым входом первого сумматора 2. Недостатком этой системы является невысокая точность стабилизации при изменении параметров внешнего возму щения в широком диапазоне. Это обус ловлено тем, что сервопривод будет работать в оптимальном, в смысле точности стабилизации, режиме (на границе существования непрерывного скользящего режима) только при расчетном возмущении. При отклонении параметров возмущения от расчетных система будет работать либо в непрерывном скользящем режиме, либо в режиме переключений. В первом случае средняя скорость отклонения регулирующего органа будет меньше, чем максимальная располагаемая скорость сервопривода. Поэтому ошибка стабилизации системы А Ч будет больше минимально возможной, которую можно получить, если параметры регулятрра изменить так, чтобы сервопривод работал иа границе существования непрерывного скользящего режима. Во втором случае АУ также будет больше минимально возможной АУ mIп из-за отрицательного сдвига по фазе между управляющим сигналом и отклонением регулирующего органа. Причем разница меящу А У и АЧ,|„будет тем больше, чем больше отклонение пара-, метров возмущения от расчетных. .Целью изобретения является уменьД1ение ошибки стабилизации при изменении параметров внешнего возмущения в широком диапазоне, т.е. повышение точности системы.
Достигается это тем, что система дополнительно содержит релейный элемент и последовательно соединенны блоки дифференцирования, выделения j модуля, умножения и интегратор, выхо которого соединен с вторым входом второго сумматора, выход которого через релейный элемент соединен с вторым входом блока умножения, а вход блока дифференцирования соединен с выходом первого сумматора.
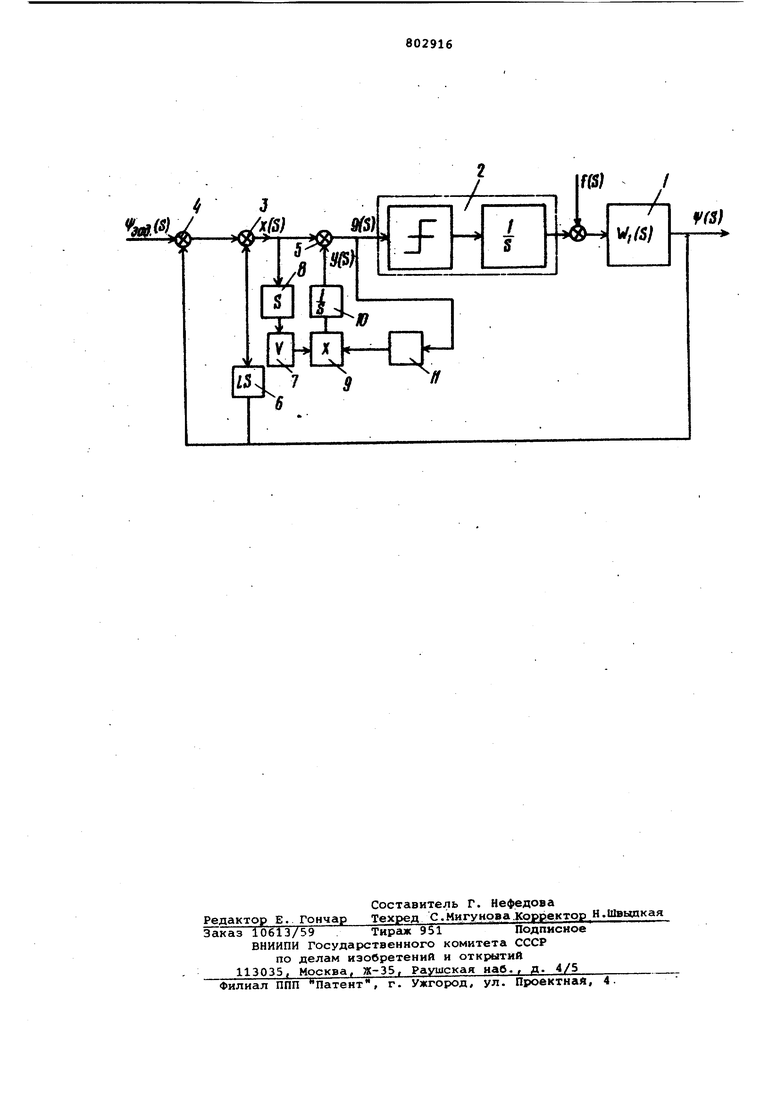
На чертеже представлена блок-схема системы.
Система автоматической стабилизации содержит объект регулирования 1, сервопривод 2 с постоянной скоростью, первый сумматор 3, датчик 4 ошибки регулируемой координаты, вто- рой сумматор 5, датчик 6 производной регулируе.мой координаты, блок 7 выделения модуля, блок дифференцирования 8, блок умножения 9, интегратор 10 и релейный элемен- 11. x(t) - комплексная переменная, применяемая в преобразовании Лапласа.
В отличии от известной системы, здесь введены новые элементы 7-11, которые предназначены для получения дополнительного сигнала y(t), удовлетворяющего соотношению
y(t) |x(t) ) signg(t) (1)
При выполнении соотношения (1) система при любых параметрах внешнего возмущения f(t) будет работать на границе существования непрерывного скользящего режима и ошибка стабилизации будет минимальной.
Система работает следующим образом.
При действии на объект внешнего возмущения регулируемая координата 4(t) отклоняется от заданного значения HyKjC t). Сигнал, пропорциональный этому отклонению, с датчика ошибки регулируемой координаты 4 поступает на первый вход первого сумматора 3. На второй вход этого сумматора подается сигнал с датчика производной регулируемой координаты б, а на выходе формируется: линейная комбинация измеренных сигналов x(t) 4ja9( t l-flt) -c{4 (t) , где (X. постоянный коэффициент настройки. Сигналы x(t) и v(t), удовлетворяющие соотношению (l),
суммируются на втором сумматоре 5. Выходной сигнал второго сумматора 5, является управляющим сигнгшом g.(t). Исполнительный орган отклоняется с постоянной скоростью, знак которой совпадает со знаком управляющего сигнала g (t) .
С целью проверки эффективности проведено, моделирование известной и предлагаемой систем автоматической стабилизации курса модели судна на подводных крыльях.
Результаты моделирования показали, что известная система стабилизации на рассматриваемых углах встречи с волной X 0745,® 90, 135°, 180 может / обеспечить минимальное значение ошибки стабилизации А Ч 1,5.
Предлагаемая система обеспечивает ,7® при тех же параметрах объекта, возмущений и ограничениях по скорости и отклонению регулирующего органа.
Формула изобретения
Система автоматической стабилизации, содержащая последовательно соединенные датчик ошибки регулируемой координаты, первый и второй сумматоры, сервопривод, объект регулирования и датчик производной регулируемой координаты, выход которого соединен с вторым входом первого сумматора, отличающа-яся тем, что, с целью повышения точности системы, она содержит релейный элемент и последовательно соединенные блоки дифференцирования, выделения модуля, умножения и интегратор, выход которого соединен с вторым входом второго сумматора, выход которого через релейный элемент соединен с вторым входом блока умножения, а вход блока дифференцирования соединен с выходом первого сумматора.
Источники информации, принятые во внимание при экспертизе
с. 270 (прототип).
