Изобретение относится к микро« биологии, а именно к автоматическому управлению процессами ферментации, и может быть использовано в микробиоло - гической, медицинской, пищевой и гнх отраслях промышленности,.
Цель изобретений г- увеличение хода целевого продукта0
Повышение выхода целевого продукта в периодических производствах на ос нове микробиологического синтеза свяг- зано с повышением качества управле-ния процессом ферментации, а именно с уменьшением времени переходных цессов и повышением точности регулирования, обеспечением инвариантности 5 к возмущениям и помехамо
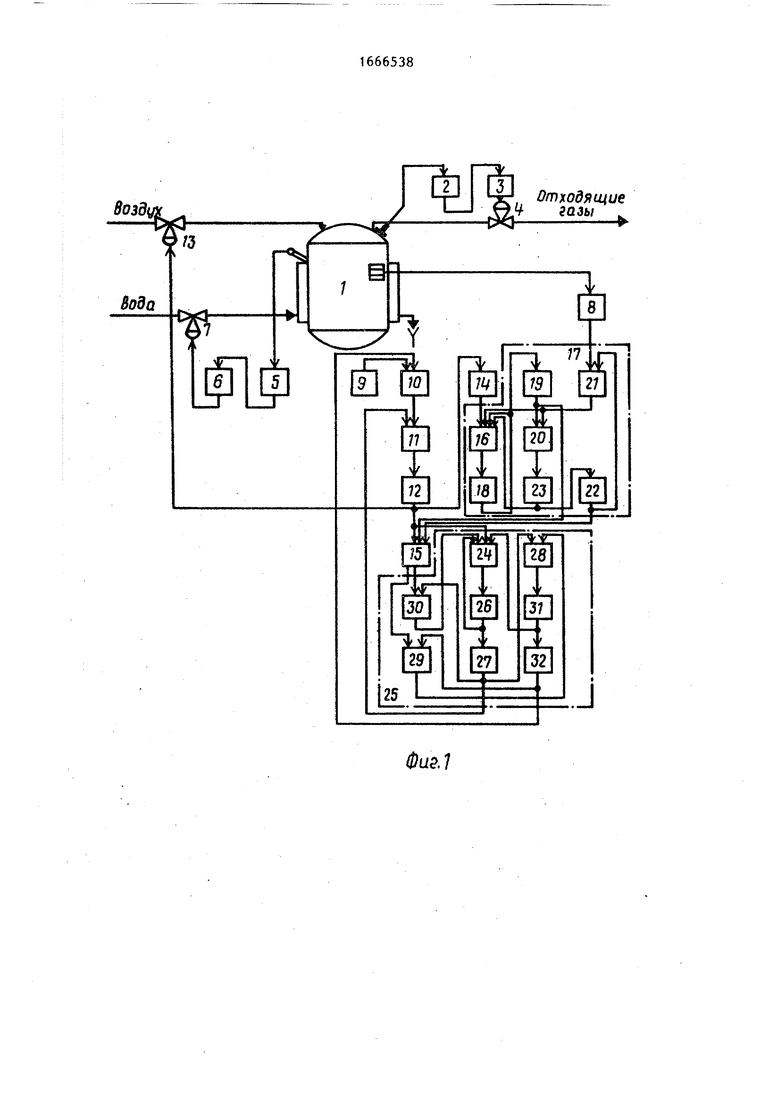
На фиг„1 приведена блбк-схема предлагаемой системы управления; на фиг о 2 - блок-схема экстраполятора, используемого в системе управления; jg на фиГсЗ - блок-схема блока формиро- вания функции переключения„
Контур стабилизации давления в ап- парате 1 содержит датчик 2, подключенный к входу регулятора 3, связан J5 ного с исполнительным механизмом 4, установленным на линии отходящих из аппарата газов„
Контур стабилизации температуры в аппарате 1 содержит датчик 5, подклю- 20 ченный к входу регулятора 6, связан- ного с исполнительным механизмом 7, установленным на линии отходящих из аппарата газов
Контур регулирования концентрации 25 растворенного кислорода в культураль- ной жидкости в аппарате 1 содержит датчик 8, блок 9 задания, подключен- ный к первому входу первого суммато- ра 10, выход которого подключен к 30 одному из входов блока 11 формировав ния функции переключения, выход кото- рого подключен к входу релейного ре- гулятора 12, выход которого соединен с исполнительным механизмом 13, с тановленным на линии подачи воздуха на аэрацию, с блоком 14 задержки и экстраполятором 150 С выхода блока 14 задержки сигнал регулирующего воздействия, задержанного на время до запаздывания, поступает на один из входов второго сумматора 16, вхоДя- щего в состав первого идентификатора 17 состояния (на чертеже обведен пунктиром)о Выход второго сумматора 45 16 соединен с первым интегратором 18, выходной сигнал которого через инвёр- тор 19 поступает на вход третьего сумматора 20, второй вход которого соединен с выходом четвертого сумма - тора 21 с Первый вход сумматора 21 соединен с выходом датчика 8, а вто- рой v с выходом второго инвертора 22, вход которого соединен с выходом второго интегратора 23, под ключ еняо- го к выходу третьего сумматора 20. Выходы второго интегратора 23 и чёт- вертого 21 сумматора, первого интёг- ратора 18 соединены с входами второ 55
5
0
5 0 с о 5
5
го сумматора 1б„ Входы экстраполято- ра 15 соединены с выходом первого инвертора 19, являющегося первым ходом первого идентификатора 17 состояния, и выходом второго инвёр- тора 22, являющегося вторым выходом первого идентификатора 17 состояния Один из входов пятого сумматора 24, входящего в состав второго инденти- фикатора 25 (на чертеже обведен пунктиром), соединен с выходом ре- лейного регулятора 12, а выход - с третьим интегратором 26, выход ко- торого соединен с входом пятого сумматора 24 и входом третьего инвертора 27, выход которого является первым выходом второго идентификатора 25 состояния и соединен с вторым входом блока 11 функции переключения, с одним из входов шестого сумматора 28, соединенного другим входом с выходом седьмого сумматора 29, и с входом восьмого сумматора 30, подключенного к второму выходу экстраполятора 15, с первым выходом которого соединен вход седьмого сумматора 29„ Выход шестого суммато- ра 28 соединен с четвертым интегратором 31, выход которого через инвертор 32 соединен с вторым входом первого сумматора 10, седьмого сумматора 29 и непосредственно с входом пятого сумматора 24, соединенного также с выходом восьмого сумматора ЗОо
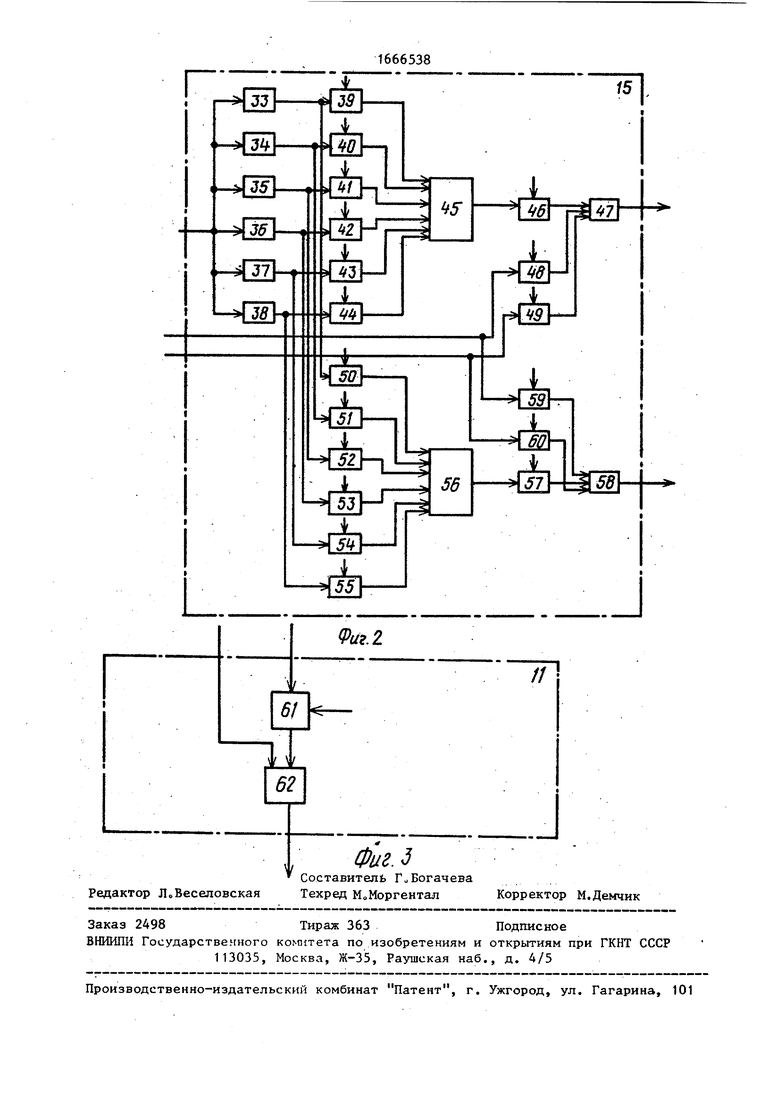
1 Экстраполятор 15 содержит блоки 33 - 38 задержки, последовательно соединенные с блоками 39 - 44 умножения на постоянный коэффициент, подключенные к входу девятого сум- матора 45, выход которого соединен с входом блока 46 умножения на постоянный коэффициент, подключенного к входу десятого сумматора 47, к двум другим входам которого подключены выходы блоков 48 и 49 умножения на постоянный коэффициент, соединенные по входу с выходами первого идентификатора 17 состоянияс Входы блоков 50 - 55 умножения на постоянный коэффициент подключены к выходам блоков 33 - 38 задержки, а выходы - к входу одиннадцатого сумматора 56, соединенного с блоком 57 умножения на постоянный коэффициент, выход которого подключен к входу двенадцатого сумматора 58, к другим входам которого подключены выходы блоков 59
и 60 умножения на постоянный коэффициент, входы которых соединены с пёрг вым и вторым выходами первого нденти - фикатора 17 состояния„ Выходы одинг- надцатого 47 и двенадцатого 58 сумма«- торов являются первым и вторым дами экстраполятора 150
Блок 11 формирования функции перевключения содержит блок 61 умножения на постоянный коэффициент, вход кото«- рого соединен с выходом первого сумматора 10, а выход подключен к одному из входов тринадцатого еумма«- тора 62, к другому входу которого подключен выход третьего инвертора 27, выход которого является первым выходом второго идентификатора 26 состояния 0 Выход тринадцатого суммаг- тора 62 является выходом блока 11 формирования функции переключения и подключен к входу релейного регуляг- тора 120
Система работает следующим обра ЗОМо
Концентрация растворенного кисло - рода в культуральной жидкости изме«- ряется датчиком 8, сигнал с выхода которого поступает на один из входов четвертого сумматора 21„ Заданное значение концентрации растворенного кислорода поступает с выхода блока 9 задания на один из входов первого сумматора 10 При наличии возмущений либо при изменении параметров мических характеристик канала регули - рования концентрации растворенного кислорода на выходе сумматора 21 никает рассогласование между действи«- тельным значением концентрации воренного 0 и его оценкой. При наЛи«- чии такого рассогласования оценка производной концентрации растворенног- го кислорода на выходе первого инвертора 19 также не соответствует деист - вительному значению производной. В результате состояние объекта отлиЧа - ется от состояния модели объекта, ис«- пользуемой в первом 17 и втором 25 идентификаторах состояния, а восста - навливаемые переменные состояния объекта на выходах третьего 27 и чет«- вертого 32 инверторов второго иденТи - фикатора 25 также отличаются от их действительных значений„ При этом сигналы оценок концентрации раство - ренного кислорода и ее производной, поступающие с выходов третьего и чет«- вертого инверторов 27 и 32 на входы
блока 11 формирования функции перег- ключения и первого сумматора -10, водят к отклонениям от нуля их выход - ных сигналов, Возникающее рассогла - сование с выхода первого сумматора 10 поступает на один из входов блока 11 формирования функции переключения, на другой вход которого поступает с
выхода второго идентификатора 25 состояния величина производной нала рассогласования Результирую щнй сигнал с выхода блока 11, состав - ленный из линейной комбинации сигнал
5 ла рассогласования и оценочного знас- чения производной его, поступает на вход релейного регулятора 12, кото«- рый формирует регулирующее воздейсто- вие на исполнительный механизм 13,
0 изменяющий подачу воздуха на аэрацию При этом происходит изменение центрации растворенного кислорода в культуральной жидкости, измеряемой датчиком 8, а вследствие этого про«5 исходит изменение сигнала рассогла - сования и колебание скорости его изменения, а также сигналов их оце«- ноКо В результате этого изменяется на обратный знак сигнал на выходе
0 блока 11 формирования функции кпючения, действие которого приводит к тому, что сигнал на выходе релейг- ного регулятора 12 изменяется на тивоположныйо Это, в свою очередь,
- приводит к тому, что регулирующее воздействие, поступающее на вход исполнительного механизма 13, измег- няется на обратное и т0д0 начиная с некоторого момента времени, регу
Q лирующее воздействие релейного регулятора 12 представляет собой посЛе«- довательность импульсов разного значка достаточно высокой частоты, что приводит к импульсной подаче расхода
5 воздуха на аэрациюо В этом режиме работы релейного регулятора 12 знаг- чение сигнала на его входе близко к нулю, и в итоге обеспечиваются нужг- ные динамические свойства системы
0 регулирования концентрации раствог- ренного кислорода: инвариантность к изменяющимся параметрам динамических характеристик процесса ферментации, к возмущениям (внешним и внутренним)
5 и помехам, присутствующим в выходном сигнале датчика 8, Кроме того, в зи со значительной инерционностью процесса и различным диапазоном pact- хода воздуха через аппарат в разлйч ные моменты ферментации, при котором интенсивность дыхания изменяется, требуется переключение регулятора с прямого на обратное действие в ходе процесса„ Поэтому импульсное регулирование с использованием предлагаем мой системы благоприятно сказывается на процессе синтеза целевого продукм та о
Если значение производной сигнала рассогласования, необходимого для формирования функции переключения, получать с помощью дифференцирования сигнала рассогласования в текущий момент времени, как это осуществляет ся в известных регуляторах, то хозащищенность системы снизится, а частота переключений уменьшится, так как интервалы между двумя переключен ниями определяются величиной запазм дывания в канале регулирования кбит- центрации растворенного кислорода Это приводит к появлению недопустим мых колебаний регулируемого парамёт - ра - концентраций растворенного Од, снижению точности регулирования, что в конечном итоге снижает выход целем вого продукта„ Поэтому в отличие от дифференциаторов информацию о пройз«- водной растворенного Оа. в текущий момент времени при наличии запаздьр- вания в предлагаемой системе получам ют с помощью первого 17 и второго 25 идентификаторов состояния и экстрам полятора 15, позволяющих исключить влияние запаздывания о Для этого сит нал регулирующего воздействия с вым хода релейного регулятора 12 поступает на вход блока 14 задержки, где задерживается на интервал времени запаздывания,, Тем самым выходной сигнал релейного регулятора 12 и обусловленный этим регулирующим вОзм действием выходной сигнал датчика 8, поступающие соответственно на первый и второй входы первого идентификам тора 17 состояния, приводятся к одно му временИс Выходной сигнал U(t- D) (Ј м запаздывание в канале регулиро - вания концентрации растворенного 02)
блока 14 задержки поступает на первы вход первого идентификатора 17 сом стояния, являющийся одним из входов второго сумматора 16„ Сигнал Y(t-Ј) с выхода датчика 8 поступает на перм вый вход четвертого сумматора 21. Первый идентификатор 17 состояния на основании информации о сигналах
10
15
20
25
65388
U(t-Ј) и Y(t-Ј) восстанавливает знам чения регулируемой переменной и пром изводной ее изменения для момента времени t-fc. Поскольку объект упм равления по каналу регулирования концентрации растворенного кислорода является динамическим и описывается в виде системы дифференциальных урав«- нений 2мго порядка с запаздыванием, то первый идентификатор 17 представм ляет собой модель объекта второго порядка, реализованную с помощью блоков 16, 18, 19, 20, 22 и 23 и преобразованную обратными связями с выхода четвертого сумматора 21 на входы второго 16 и третьего 20 сумм маторов. Необходимость в реализации обратных связей обусловлена тем, что в условиях невысокой воспроизводим мости процесса ферментации, изменения характеристик культивируемой популям ции микроорганизмов в процессе при погрешностях измерительного канала модель объекта управления становится приближенной и неточности в задании исходных коэффициентов модели приводят к неточным оценкам восставав - ливаемых значений концентрации рает«- воренного кислорода и скорости ее изменения Поэтому при поступлении на входы четвертого сумматора 21 сигнала с выхода датчика 8 и инвёрм тированного сигнала с выхода второго ,г инвертора 22, эквивалентного восстаг новленному значению регулируемой пем ременной,на выходе четвертого суммам тора 21 формируется сигнал, характем ризующий ошибку оценки С течением времени t выходной сигнал четвертого сумматора 21 стремится к нулю, при этом решение системы из двух диффе - ренциальных уравнений первого порядм ка, полученной в первом идентифика - торе 17, дает оценку значениям к6н«- центрации растворенного 0 и ее про«- изводной для момента времени t-Јo Для этого выходной сигнал блока 14 задержки поступает на один из входов второго сумматора 16, на другое вхо«- ды которого поступают инвертирован ный сигнал первого 18 и выходной сигнал второго 23 интеграторов, а также выходной сигнал четвертого сум матора 21, характеризующий ошибку оценки Если ошибка отлична от нуля, например, вследствие помех в выход«- ном сигнале датчика 8, т„е„ выходной сигнал датчика 8 и восстанавливаемый
30
40
45
50
55
с помощью первого идентификатора 17 сигнал оценки выходного сигнала дат чика 8 не равны, то возникающее согласование на выходе четвертого сумматора 21 поступает в.качестве корректирующего сигнала обратной свя зи на входы второго сумматора 16 и третьего сумматора 20, вызывая при этом разбаланс входных сигналов и появление ненулевого сигнала на выхо де сумматоров 16 и 20„ При этом ин теграторы 18 и 23 продолжают процесс интегрирования до тех пор, пока ходные сигналы второго 16, третьего 20 и четвертого сумматора 21 не 6б«- нуляются, Обнуление выходного сигна« ла четвертого сумматора 21 означает, что первый выход и второй выход пер вого идентификатора 17 состояния рав ны восстановленным оценкам значений концентрации растворенного кислорода и скорости ее изменения, полученных на выходах первого инвертора 19 и второго инвертора 22 соответственное
С выхода инверторов 19,22 и релей ного регулятора 12 сигналы поступают на вход экстраполятора 15, в котором на основании решения заложенных в него уравнений переходных состояний для канала регулирования растворен - ного Ог, инвертированные сигналы с выхода первого 13 и второго 23 интеграторов экстраполируются на интер вал времени запаздывания t-« Экстра - полированные на интервал времени запаздывания сигналы, соответствую - щие значениям концентрации раство - ренного 0 и производной ее измене - ния, с выхода экстраполятора 15 подступают на вход седьмого 29 и вось«- мого 30 сумматоров, в которых из поступивших сигналов вычитаются инвертированные выходные сигналы тре«- тьего 26 и четвертого 31 интеграто - ров. Полученные на выходе седьмого 29 и восьмого 30 сумматоров сигналы характеризуют ошибку оценки значе - ний регулируемой концентрации воренного О и скорости ее изменения восстановленных во втором идентификаторе 25 для текущего момента времени о С выхода восьмого суммато - ра 30 сигнал в качестве корректирующего воздействия поступает на вход пятого сумматора 24, где ал гебраически складывается с сигнала ми, поступающими с выхода релейного регулятора 12, с выхода третьего нн«
0
5
0
5
0
5
0
5
тегратора 26 и выхода четвертого интегратора 31. В результате на вьг- |ходе пятого сумматора 24 образуется сигнал, соответствующий оценке рой производной регулируемой пере«- менной «- концентрации растворенного О- для текущего момента времени Для восстановления значений концентра - ции растворенного 02 и скорости ее изменения выходной сигнал пятого сумматора 24 дважды интегрируется с помощью третьего 26 и четвертого 31 интеграторов о В результате на ходе третьего интегратора 26 получа ется оценка первой производной центрации растворенного кислорода, а на выходе четвертого интегратора 31 «- сигнал об оценке концентрации растворенного 02, которые поступают на входы инверторов 27 и 32, и й№- вертированные сигналы с первого и второго выходов второго идентифика - тора 25 поступают на вторые входы блока 11 формирования функции ключення и первого сумматора 10, На выходе последнего получается сигнал рассогласования между заданным зна«- чением концентрации растворенного 0 и его текущим значением, восстаньв«- ленным с помощью экстраполятора 15, двух идентификаторов 17 и 25 состоя - ния„ Полученный сигнал рассогласо - вания поступает на первый вход блока 11 формирования функции переключен ния, на другой вход этого блока ступает сигнал с выхода третьего инвертора 27, характеризующий бания скорости изменения концентра - ции растворенного 02 Линейная кбм бинация сигнала рассогласования и скорости изменения концентрации растворенного 02 является управляющим сигналом, поступающим на вход релей - ного регулятора 12, который форми«- рует импульсы на подачу аэрирующего воздуха с той частотой, которая обёс« печивает скользящий режим в контуре и в конечном итоге инвариантность системы регулирования концентрации растворенного 0 к изменяющимся па«- раметрам динамических характеристик канала регулирования и помехам, присутствующим в выходном сигнале датчика 8„
Экстраполятор 15 работает следую1- . щим образом,
На вход экстраполятора 15 посту - пает сигнал с выхода релейного perгулятора 12„ В экстраполяторе 15 с помощью блоков 33 - 38 задержки осу«- ществляются многоканальная задержка входного сигнала экстраполятора Да релейного регулятора 12 на /
чины 9 1 7 (i - число отрезков т tЬ
разбиения интервала запаздывания Ј , йапример i 6 в предлагаемой систе - ме), умножение задержанных сигналов ш предварительно вычисленные для Каждого отрезка разбиения коэффициён - ты, суммирование соответствующих изведений в сумматоре 45 и умножение полученного сигнала в блоке 46 на постоянный .коэффициент,, В результате Суммирования дискретных значений пе« входной функции на выходе блока 46 формируется сигнал об одной состав - ляющей известного выражения, опре«- еляющего переходные состояния объёк - ta по каналу регулирования концент рации растворенного кислорода Для получения двух других составляющих на другие входы экстраполятора 15 поступают сигналы с выходов первого 19 и второго 22 инверторов идентйфи - Латоров 17t которые, умножаясь на Достоянные коэффициенты в блоках 48 И 49 умножения, поступают совместно с выходным сигналом блока 46 кения на входы десятого сумматора 47о В результате на выходе сумматора 47 формируется сигнал оценки регули«- руемой переменной, проэкстраполирог- ванной на интервал запаздывания, торый является первым выходом экстра«- полятора 15„ Сигнал оценки произвбдг- ной регулируемой переменной,
экстраполированной на интервал эапаз - дывания, формируется аналогичным об разом на выходе сумматора 58, являю - щегося вторым выходом экстраполятора 15„ Для этого сигналы, задержанные в блоках 33 «- 38 задержки, поступают на входы блоков 50 55 умножения (по числу задерживаемых сигналов), где умножаются на предварительно вычйс«- ленные коэффициенты для каждого резка разбиения„ Выходные сигналы блоков 50 « 55 суммируются в суммато - ре 56, выходной сигнал которого пос« ле умножения на постоянный коэффициент в блоке 57 умножения суммиру- ется в сумматоре 58 с выходными налами блоков 59 « 60 умножения, на входы которых поступают с выходов первого идентификатора 17 состояния
сигналы оценки регулируемой перемен - ной и ее производной для момента времени t-c-0 В результате на выходе сумматора 58 формируется сигнал оцен« ки производной концентрации раство - ренного кислорода, проэкстраполиро - ванной на интервал запаздывания„
Полученные в экстраполяторе 15 оценки используются во втором тификаторе 25 состояния для форми рования текущих оценок концентрации растворенного кислорода и его пройз - водной, которые используются для ВЬР- работки такого сигнала регулирующего воздействия, которое при наличии за«- паздывания в канале регулирования позволяет получить регулируемую пере« менную, равную ее заданному значению
Применение предлагаемой системы автоматического управления позволяет как показали результаты моделирова - ния, снизить максимальные динамичес«- кие отклонения концентрации раство - ренного Од в 2 раза, уменьшить время переходных процессов в 1,5 раза по сравнению с прототипом, что увеличив вает выход целевого продукта пример но на 2% с,
Формула изобретения
1. Система автоматического управ«- ления периодическим процессом ментации, содержащая контуры стабиг- лизации давления и температуры в ап«- парате, включающие в себя последова - тельно соединенные датчик измеряемог параметра, регулятор и исполнительг- ный механизм, контур регулирования концентрации растворенного кислорода в культуральной жидкости, включающий в себя датчик и блок задания, подклю ченный к первому входу первого сумма тора, соединенного с входом блока формирования функции переключения, выход которого подключен к релейному регулятору, соединенному с исполниг- тельным механизмом, установленным на линии подачи воздуха на аэрацию, о т« личающаяся тем, что, с лью повышения выхода целевого дукта, она снабжена блоком задержки, экстраполятором и двумя идентифика - торами состояния, первый выход втог- рого идентификатора состояния под«- ключен к входу блока формирования функции переключения, на другой вход которого подключен выход первого
сумматора, соединенного вторым входом с вторым выходом второго идентифика«- тора состояния, выход регулятора подключен к входам блока задержки, экстраполятора и второго идентификаг тора состояния, к другим входам торого подключены первый и второй выходы экстраполятора, входы которого соединены с первым и вторым выходами первого идентификатора состояния, первьй и второй входы которого под«- ключены соответственно к выходам бло«- ка задержки и датчика контура регулирования концентрации растворенного кислорода0
2 о Система по п„1, отличаю 4 щ а я с я тем, что первьй иденти - фикатор состояния содержит послед вательно соединенные второй сумматор, первьй интегратор, первьй инвертор, выход которого является первым вые- ходом идентификатора состояния, тий сумматор, второй интегратор, вто рой инвертор, выход которого является вторым выходом идентификатора состоя - ния, и четвертый сумматор, другой вход которого соединен с выходом дат чика концентрации растворенного кис«- лорода, а выход четвертого сумматора соединен с вторым и третьим суммато«- рами, другие входы второго сумматора соединены с выходами блока задержки и выходами обоих интеграторова
3. Система по п„1, отличаю - щ а я с я тем, что второй идентификатор состояния содержит последова« тельно соединенные пятый сумматор, третий интегратор,1 . третий инвертор, выход которого является первым выхо«- дом второго идентификатора, шестой сумматор, четвертый интегратор, чёт вертый инвертор, выход которого яв«ляется вторым выходом второго иде№- тификатора состояния, и седьмой матор, другой вход которого соединен с вторым выходом экстраполятора, пер« вый выход которого подключен к входу восьмого сумматора, на другой вход которого подключен выход третьего инвертора, выходы седьмого и восьмог- го сумматоров соединены с входами пятого и шестого сумматоров, причем один из входов пятого сумматора cot- единен с выходом регулятора, а другие входы пятого сумматора - с выходами обоих интеграторов, второй вход пёр«- вого сумматора подключен к выходу четвертого инвертора0
I
4 о Система по п„1, отличаю щ а я с я тем, что экстраполятор содержит последовательно соединенные шесть блоков задержки и двенадцать блоков умножения на постоянный коэфг- фициент, четыре сумматора, причем вьл ходы первых шести блоков умножения подключены к входу девятого суммато - ра, а выходы остальные «- к входу сятого сумматора, выходы девятого и десятого сумматоров подключены к входу тринадцатого и четырнадцатого блоков умножения на постоянный фициент, выходы которых подключены к одному из входов одиннадцатого и две надцатого сумматоров, два других входа которых соединены с выходами пятнадцатого и шестнадцатого, семнадг цатого и восемнадцатого блоков жения на постоянный коэффициент соот« ветственно, входы которых подключены к выходам первого и второго инверто - ров, выходы одиннадцатого и двенад - цатого сумматоров «- выходы экстра - полятора
Лий
П
, &т одящие lV газы .
J


| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования объекта с запаздыванием | 1986 |
|
SU1397875A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Адаптивный прогнозатор | 1982 |
|
SU1049866A1 |
| Устройство для контроля обезуглероживания сталеплавильной ванны | 1979 |
|
SU870443A1 |
| РЕГУЛЯТОР | 1990 |
|
RU2015520C1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| Устройство для контроля технологических параметров кислородно-конверторного процесса | 1984 |
|
SU1188210A1 |
| Адаптивный идентификатор для объекта с запаздыванием | 1986 |
|
SU1365047A1 |
Изобретение относится к микробиологии, а именно к системам автоматического управления процессом ферментации, и может быть использовано в микробиологической, медицинской, пищевой и других отраслях промышленности. Целью изобретения является повышение выхода целевого продукта. Система автоматического управления периодическим процессом ферментации содержит контуры стабилизации давления и температуры в аппарате, включающие последовательно соединенные датчик измеряемого параметра, регулятор и исполнительный механизм, контур регулирования концентрации растворенного кислорода в культуральной жидкости, включающий датчик и блок задания, подключенный к первому входу первого сумматора, соединенного с входом блока формирования функции переключения, выход которого подключен к релейному регулятору, соединенного с исполнительным механизмом, установленным на линии подачи воздуха на аэрацию, блок задержки, экстраполятор, первый и второй идентификаторы состояния, первый выход последнего подключен к входу блока формирования функции переключения, на другой вход которого подключен выход первого сумматора, соединенного вторым входом с вторым выходом второго идентификатора, выход регулятора подключен к входу исполнительного механизма, блока задержки, экстраполятора и второго идентификатора, к другим входам которого подключены первый и второй выходы экстраполятора, входы которого соединены с первым и вторым выходами первого идентификатора, первый и второй входы которого подключены соответственно к выходу блока задержки и выходу датчика концентрации растворенного кислорода. 3 з.п.ф-лы, 3 ил.
Фаг.1
Г
г
1666538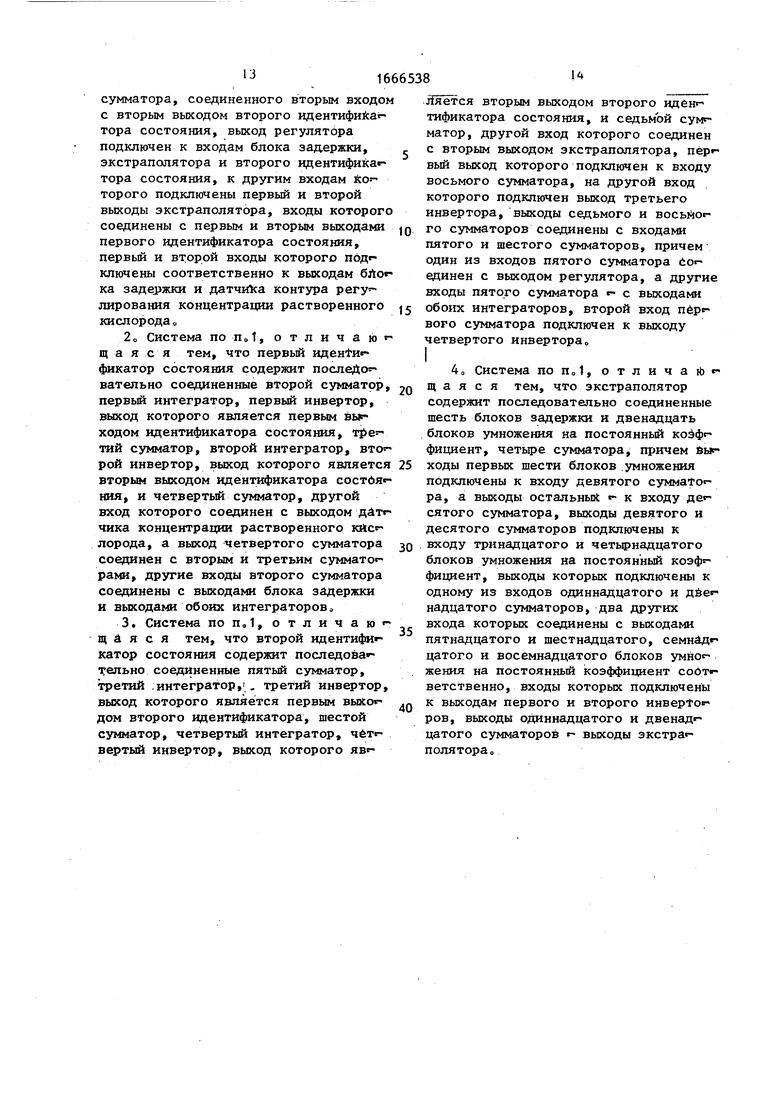
| Система автоматического управления периодическим процессом ферментации | 1986 |
|
SU1399342A1 |
