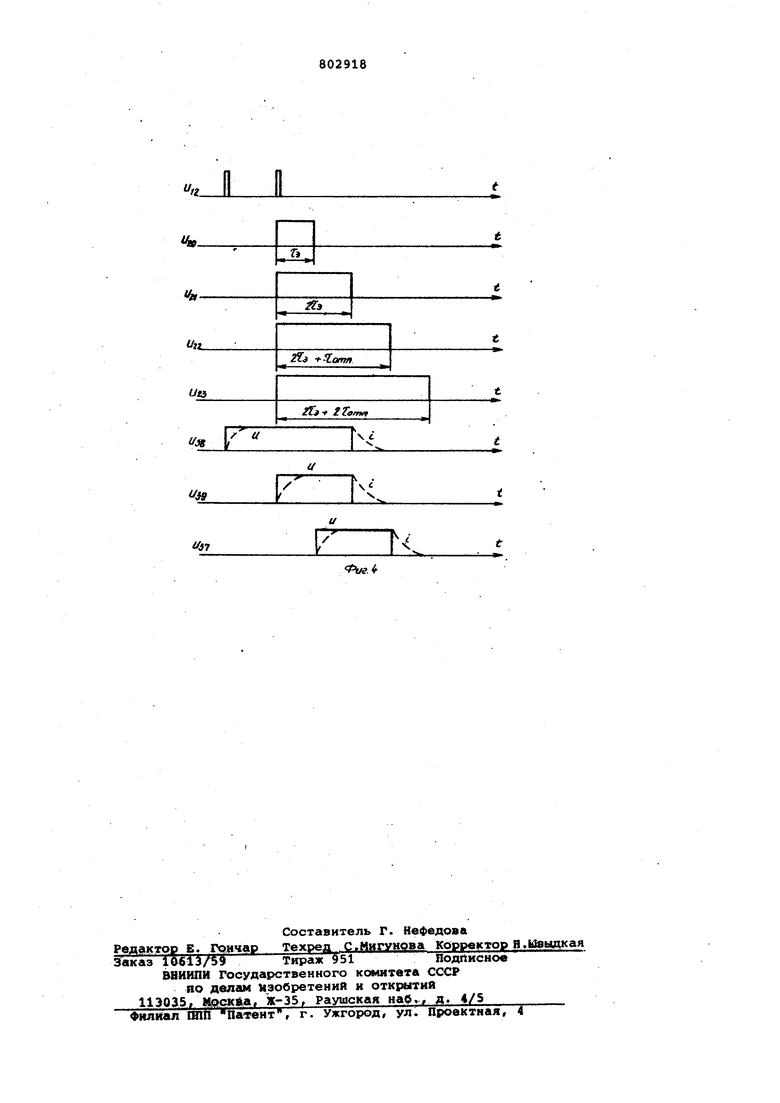
Изобретение относится к автоматике и предназначено для использования в системах управления перемещением р бочих органов промышленных механизмов, например в системах управления функциональными узлами промьшшенных тракторов. Известен привод, содержащий сумматор, задающий блок, преобразовател и гидроусилитель ij. Наиболее близким по технической .сущности является привод,содержащий суммирующий блок, первый вход которо го соединен с задающего блока, второй.вход .- с выходом датчика перемещений, а выход - с входом фазочувствительного усилителя, первый второй и третий электромеханические преобразователи,выходы которых через гидроусилитель кинематически соединены с датчиком перемещения и рабочим органом 2. Недостатками данного привода являются малое быстродействие, так как любое перемещение меньше порога срабатывания, переключающего устройства отрабатывается на замедленной скорости. Перемещения, большие порога срабатывания переключающего устройства, начинают отрабатываться на большей скорости, но при подходе к согласованному положению привод переключается на замедленную скорость, что затягивает время отработки, кроме того данный привод не может обеспечить высокую точность, так как уменьшение порога срабатывания реле управления скоростью медленного подвода приводит к автоколебаниям в системе . Цель изобретения - повышение быстродействия и точности привода. Это достигается тем, что в известный электрогидравлический следящий привод введены пороговые блоки точного и грубого отсчетов, генератор импульсов переменной частоты, счетчик, злементы задержки, ключи, элементы НЕ, И, ИЛИ, выходы первого и второго элементов ИЛИ соединены соответственно с первыми входами первого элемента и и счетчика, второй вход которого подключен к выходу первого элемента И, выход третьего элемента ИЛИ через первый элемент НЕ соединен с вторым входом первого элемента И, к третьему входу которого через генератор импульсов переменной частоты подключены входы вторых и первый пороговых блоков точного и грубого отсчетов и выход фазочувствитепьного усилителя, выход первого порогового блока, точного отсчета подключен к первому входу первого элемента ИЛИ и к первым входам второго и третьего элементов И, выход второго порогового блока точного отсчета - к второму входу, первого элемента ИЛИ и к первым входгот четвертого и пятого элементов И, выход первого порогового блока груб я д -отсчета - к первому входу второ й Элемента ИЛИ и к первому входу четвёртого элемента ИЛИ, Ъыход второ чУ: порогового грубого отсчета - к й Ьрому входу второго элемента ИЛИ и к первому входу пятого элемента ИЛИ, первый выход счетчика соедиаен с первым входом шестого элемента ИЛИ второй вход которого подключен к выходу шестого элемента И, второй выход счетчика соединен с входами первого, второго, третьего и четвертого элементов задержки и к вторым входам третьего и пятого элементов И, выход первого элемента задержки подключен к первому входу третьего элемента ИЛ и через второй элемент НЕ - к первом входу седьмого элемента И, выход вто рого элемента задержки подключен к второму входу третьего элемента ИЛИ, к первому входу шестого элемента И и через третий элемент НЕ - к первому входу восьмого элемента И, выход третьего элемента задержки подключен к третьему входу третьегоэлемента ИЛИ и к первому входу девятого элемента И, выход, четвертого элемент задержки подключен к четвертому входу третьего элемента ИЛИ и к вторым входам шестого, седьмого и восьмого элементов И, выход седьмого и восьмого элементов И соединены с третьим входом второго элемента ИЛИ, выход девятого элемента И через первый ключ подключен к входу первого элект ромеханического преобразователя, выход шестого элемента ИЛИ соединен с вторыми входами второго и четвертого элементов и, выходы вто.рого и третьего элементов.И..соединены соответственно со вторыми входами четвертого И пятого элементов ИЛИ, а выходы четвертого и пятого элементов И с третьими входами и пятого и четвер того элементов ИЛИ, выходы четвертого и пятого элементов ИЛИ.соответственно через второй и третий ключи подключены к второму и третьему элек ромеханическим преобразователям. а фиг, 1 приведена функциональная схема электрогидравлического / следящего привода; на .фиг. 2 ц 3 представлены зависимости выходных напряжений пороговых блоков и частоты генератора импульсов переменной частоты от величины рассог.пасования} на фиг. 4 - временная диаграмма работы отдельных элементов привода. Предлагаемое устройство содержит суммирующий блок 1, задающий блок 2, датчик перемещений 3, рабочий орган i4, фазочувствительный усилитель 5, первый и второй пороговые блоки отсчета б и 7, первый и второй / пороговые блоки грубого отсчета 8 и 9, первый и второй элементы ИЛИ 10 и 11, счетчик 12, первый элемент И 13, генератор импульсов переменной частоты 14, третий элемент ИЛИ 15, первый, второй и третий элементы НЕ 16, 17 и 18, второй элемент И 19, первый, второй, третий и четвертый элементы задержки 20, 21, 22 и 23, третий, четвертый и пятый элементы И 24, 25 и 26, первый ключ 27, четвертый . элемент ИЛИ 28, шестой,седьмой, восьмой и девятый элементы VI 29, 30, 31 и 32, пятый и шестой элементы ИЛИ 33 и 34, второй и третий ключи 35 и 36, первый,второй и третий электромеханические преобразователи 37, 38 и 39, гидроусилитель 40. Выходные напряжения (см. фиг.2,4) первого и BTOpJoro пороговых блоков 6, 7точного отсчета обозначены И 6 и И 7, выходные напряжения первого и второго пороговых блоков 8, 9 грубого отсчета - И 8 и И 9, величина рассогласования -Е , выходное напряжение счетчика - К 12, выходные напряжения первого, Btoporo, третьего и четвертого элементов задержки - И 20, И 21, И 22 и И 23, выходные напряжения первого, второго и третьего электромеханических преобразователей И 37, И 38 и И 39, скорость перемещения штока гидроусилителя - V,постоянные времени срабатывания и отпускания электромеханических преобразователей и Corn частота генератора импульсов переменной частоты - f , заданная точность привода -J- Электрогидравлический следящий привод работает следующим образом. 8зависимости от знака и величины рассогласования срабатывают первый (второй) пороговые блоки точного отсчета 6 (7) и грубого отсчета 8 (9). При этом сигналом с выхода первого (второго) порогового блока грубого отсчета 8 (9) через второй элемент ИЛИ 11 удерживается в исходном состоянии счетчик 12 и через четверТ{ай (пятый) элемент ИЛИ 28 (33) и второй (третий) 1ишчи 35 (36) включает второй (третий) электромеханический преобразователь Зв (39). Шток гидроусилителя 40 идет вперед (иазад) со скоростью V. При уменьшении рассогласования до величины порога срабатывания первого {второго J порогового блока грубого отсчета 8(9), равной Sr - У-ГЭ , сигнал с выхода первого (второго) порогового блока грубого отсчета 8 (9) исчезает и на выходах счетчика 12
появляются последовательно импульсы, поступающие на вход счетчика 12 с генератора импульсов переменной «частоты 14 через первый элемент И i 13. Первый импульс через шестой элемент ИЛИ 34 и второй четвертый) элемент И 19 (25), четвертый (пятый) элемент ИЛИ 28 (33) и второй (третий ключ 35 (36) подтверждает вкгеочение второго (третьего) злектромеханическо го преобразователя 38 (39), Шток гидроусилителя 40 продолжает двигаться с прежней скоростью вперед (назад) . Второй и№1ульс через первый, второй, третий и четвертый элемента задержки 20, 21, 22 и 23, третий элемент ИЛИ 15 и первый элемент НЕ 16 запрещает прохождение импульсов на счетчик 12, через второй и четвертый элементы задержки 21 и 23, шестой элемент ИЛИ 34, второй (четвертый) элемент И 19 (25), четвертый (пятый) элемент ИЛИ 28 (ЗЗ), второй ( третий) ключ 35 (36 ) подтверждает включение второго { третьего электромеханического преобразователя 38 (39), через третий (пятый ) элементи 24 (2б), пятый(четвертый) элемент ИЛИ 33 (28 включает третий ( второй)ключ 36 (35), При этом через время TTj включается третий (второй) электромеханический преобразователь 39 (38) и перекрыва-; ет сливную и напорную магистрали гидроусилителя 40. Шток гидроусилителя останавливается. После исчезновения сигнала на первом элементе задержки 20 через второй элемент НЕ 17, седьмой элемент И 30, девятый элемент И 32 и первый ключ 27 включается первый электромеханический преобразователь 37, который через время Тд втягивается и перекрывает напорную магистраль гидроусилителя 40. После исчезновения сигнала на втором элементе задержки 21 через третий элемент НЕ 18, восьмой элемент И 31 и второй элемент ИЛИ 11 сбрасывается счетчик 12, при этом с второго и третьего электромеханического преобразователя 38. (-39) снимается сигнал и они отпускают.
После исчезновения сигнала с тре-тьего элемента задержки 22 снимается напряжение с первого электромеханического преобразователя 37,и он так же отпускает. После исчезновения сигнала с выхода четвертого элемента задержки 23 привод приходит в исходное состояние.
Таким образом рассогласование
€: у-1Гэ -т
отрабатывается на полной, скорости. При рассогласовании включается только первый (второй ) пороговый блок точного отсчета б (7) и. импульсы через первый элемент И 13 поступают на счетчик 12. Первым им.пульсом.через шестой элемент ИЛИ 34, «торой (четвёртый) элемент 19 (25)
четвертый (пятый) элемент ИЛИ 28 (33) ,и через второй (третий) ключ 35 (36) включается второй (третий )эле стромеханический преобразователь 38 (39. Второй импульс через первый,, второй, третий и четвертый элементы зещержки 20, 21, 22 и 23, третий элемент ИЛИ 15 и Первый элемент НЕ 16 запрещает прохождение импульсов на счетчик 12, через второй и четвертый элементы задержки 21 и 23, шестой элеoмент -И 29, шестой элемент ИЛИ 34, второй (четвертый) элемент И 19 (25/, четвертый (пятый ) элемент ИЛИ 28 (33), второй (третий) ключ 35 (Зб) подтверждает включение второго {третьего )
5 электромеханического преобразователя 38 (39), через третий (пятый) элемент И 24 (26); пятый (четвертый) элемент ИЛИ 33 (28) включает третий (второй) ключ 36 (35). При этом через время Tj включается третий (.второй)
0 электромеханический преобразователь 39 (ЗВ) и перекрывает сливную и напорную магистрали гидроусилителя 40. Шток гидроусилителя останавливается. После исчезновения сигнала на первом
5 элементе задержки 20 через второй элемент НЕ 17, седьмой элемент И 30, девятый элемент И 32 и первый ключ 27 включается первый электромеханический преобразователь 37, который че0рез время TI втягивается и перекрывает напорную магистраль гидроусилителя 40. После исчезновения сигнала на втором элементе задержки 21 через третий элемент НЕ 18, восьмой эле5мент И 31 и второй элемент ИЛИ 11 сбрасывает счетчик 12, при этом с второго и третьего электромеханических преобразователей38 и 39 снимается сигнал и они отпускают. После ис0чезновения сигнала с третьего элемента задержки 22 снимается напряжение с первого электромеханического преобразователя 37 и он также отпускает. После исчезновения сигнала с четвертого элемента задержки 23 сис5тема приходит в исходное состояние.
Таким образом, за время между двумя импульсами шток гидроусилителя 40 отрабатывает перемещение
С V/f.
O
При этом, если оставшееся рассогласование будет меньше порога срабатывания первого (второго) порогового- блока точного отсчета 6 (7),
5 который определяет необходимую точность работы привода, то привод останавливается. Если при исчезновении сигнала с четвертого элемента задержки 23 рассогласование будет больше порога срабатывания первого
0 ( второго) порогового блока точного отсчета 6 (7), то на счетчик 12 поступят два импульса и привод сдела-ет еще один шаг. Далее процесс повторяется до тех пор, пока не будет от5работано заданное рассогласование с заданной точностью. I Из фиг. 3 видно, .что если при рассогласовании, равном порогу срабатывания первого (второго) порогово го блока грубого отсчета В (Э, т.е. при VTj+u T частота генератора будет paвнa /Гэ{Гц), а при рассогласовании , равном порогу срабатывания первого (второго) порогового блока точного отсчета б (7), т.е. при частота генер;атора будет равна V f Р любое рассогласование меньшее порога срабатывания первого (второго) порогового блока грубого отсчета 8 (9 J будет отрабатываться за один шаг. Изменяя зависимость f F IE) , можно обеспечить устойчивую работу привода при любой заданной точности йСт. Использование изобретения позволи увеличить быстродействие и точность перемещения рабочих органов производ ственных механизмов, что значительно увеличит их производительность, повысит качество выпускаемой продукции и даст народному хозяйству значитель ный экономический эффект. Формула изобретения Электрогидравлический следящий привод, содержащий суммирующий блок первый вход которого соединен с выходом задающего блока, второй вход с выходом датчика перемещения, а вы ход - с входом фазочувствительного усилителя, первый, второй и третий электромеханические преобразователи выходы которых через гидроусилитель кинематически соединены а датчиком перемещения и рабочим органом, о тли ч а ю щ и и с я тем, что, с ц лью повышения быстродействия и точности привода, он содержит пороговы блоки точного и грубого отсчетов, г нератор импульсов переменной, частоты, счетчик, элементы задержки, клю элементы НЕ, И, ИЛИ, выходы первого и второго элементов ИЛИ соединены с ответственно с первыми входами первого элемента И и счетчика, второй нход которого подключен к выходу пе вого элемента И, выход третьего эле мента ИЛИ через первый элемент НЕ соединен с вторым входом первого эл мента И, к третьему входу которого рез генератор импульсов переменной частоты подключены входы первых и вторых пороговых блоков точного и Г бого отсчетов и выход фазочувствительного усилителя, выход первого порогового блока точного отсчета по ключен к первому входу первого элемента ИЛИ и к первым входам второго третьего элементов И, выход второо порогового блока точного отсчеа - к второму входу элемента ИЛИ к первым входам четвертого и пяого элементов И, выход первого поогового блока грубого отсчета.- к ервому входу второго элемента ИЛИ , к первому входу четвертого элемена ИЛИ, выход второго порогового блока грубого отсчета - к второму входу второго элемента ИЛИ и к первому входу пятого элемента ИЛИ, первый выход счетчика соединен с первым входом шестого элемента ИЛИ, второй вход которого подключен к выходу шестого элемента И, второй выход счетчика соединен с входами первого, второго, третьего и четвертого элементов задержки и к вторым входам третьего и пятого элементов И, выход первого элемента задержки подключен к первому входу третьего элемента ИЛИ и через второй элемент НЕ к первому входу седьмого элемента И, выход второго элемента задержки подключен к второму входу третьего элемента ИЛИ, к первому входу шестого элемента И и через третий элемент НЕ - к первому входу восьмого элемента И, выход третьего элемента задержки подключен к третьему входу третьего элемента ИЛИ и к первому входу девятого элемента И, выход четвертого элемента задержки подключен к четвертому входу третьего, элемента ИЛИ и к вторым входам шестого, седьмого и восьмого элементов И, выходы седьмого и восьмого элементов И соединены соответственно с вторым входом девятого эдемента И и с третьим входом второго элемента ИЛИ, выход девятого элемента И через первый ключ подключен к входу первого электромеханического преобразователя, выход шестого элемента ИЛИ соединен с вторыми входами второго и четвертого элементов И, выходы второго и третьего элементов И соединены соответственно с вторыми входами четвертого и пятого элементов ИЛИ, а выходы етвертого и пятого элементов И - с третьими входами пятого и четвертого элементов ИЛИ, выход четвертого и пятого элементов ИЛИ соответственно через второй и третий ключи подключены к второму и третьему электромеханическим преобразователям. Источники информации, принятые во внимание при экспертизе 1.Следящие приводы.Под ред. д.т.н. проф. Чемоданова Б. К. - М; Энергия, 1976, книга вторая, с. 204, рис. 13-7. 2.Авторское свидетельство СССР № 185484, кл. G05 Л , 17.05.65 прототип).
Фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий при-ВОд | 1979 |
|
SU798709A1 |
| Электрогидравлический следящий привод | 1977 |
|
SU732802A1 |
| Электрогидравлический следящий привод | 1979 |
|
SU901669A1 |
| Электрогидравлический следящий привод | 1977 |
|
SU652530A1 |
| Электрогидравлический следящий привод | 1979 |
|
SU930231A1 |
| Устройство для коррекции уровня ограничения при воспроизведении двоичной последовательности с носителя магнитной записи | 1989 |
|
SU1667152A2 |
| Устройство для декодирования избыточных кодов | 1983 |
|
SU1105927A1 |
| Автоматизированная адаптивная система управления рудновосстановительной электропечи | 1989 |
|
SU1806448A3 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ЧМ СИГНАЛОВ | 1984 |
|
SU1841018A2 |
| Устройство для коррекции уровня ограничения при воспроизведении двоичной последовательности с носителя магнитной записи | 1985 |
|
SU1277184A1 |