(5) ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЩИЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий привод | 1977 |
|
SU732805A1 |
| Электрогидравлический следящий привод | 1977 |
|
SU732802A1 |
| Электрогидравлический следящий при-ВОд | 1979 |
|
SU798709A1 |
| Электрогидравлический следящий привод | 1978 |
|
SU802918A1 |
| Электрогидравлический следящий привод | 1979 |
|
SU901669A1 |
| Электрогидравлический следящий привод | 1982 |
|
SU1049863A2 |
| Электрогидравлический следящий привод | 1977 |
|
SU652530A1 |
| Устройство для регулирования электрического режима дуговой многофазной электропечи | 1985 |
|
SU1259522A1 |
| Регулятор | 1979 |
|
SU800959A1 |
| ПРИВОД НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ ТАНКОВОГО ВООРУЖЕНИЯ | 2003 |
|
RU2238506C1 |
Изобретение относится к автоматике и предназначено для использования в системах автоматического управления перемещением рабочих органов механизмов, например, промьниленных тракторов .
Известен электрогидравлический следящий привод, содержащий гидроусилитель с электромагнитами, блок задания, датчик обратной связи, фазочувствительный усилитель и переключающее устройство .
Недостатком этого привода является малое быстродействие, так как любое перемещение меньше порога срабатывания переключающего устройства отрабатывается на замедленной скорости .
Перемещения же больше порога срабатывания переключающего устройства начинают отрабатываться на большой скорости, но при подходе с согласованному положению привод переключается на замедленную скорость, что
увеличивает время отработки сигнала управления.
Наиболее близким к предлагаемому по технической сущности является электрогидравлический следящий привод, содержащий первый и второй ключи, задающий блок, датчик перемещения, первый выход которого соединен с гидроусилителем, первый блок сравнения, первый и второй выходы
10 которого подключены соответственно через первый и второй пороговые блоки к первым и вторым входам блока управления и элемента ИЛИ, выход которого соединен с входом генератоtsра .линейноизменяющегося напряжения, Э первый и второй выходы блока управления соединены соответственно через первый и второй усилители с пёрвым и вторым электромагнитами 2.
Недостатком известного привода является малая точность.
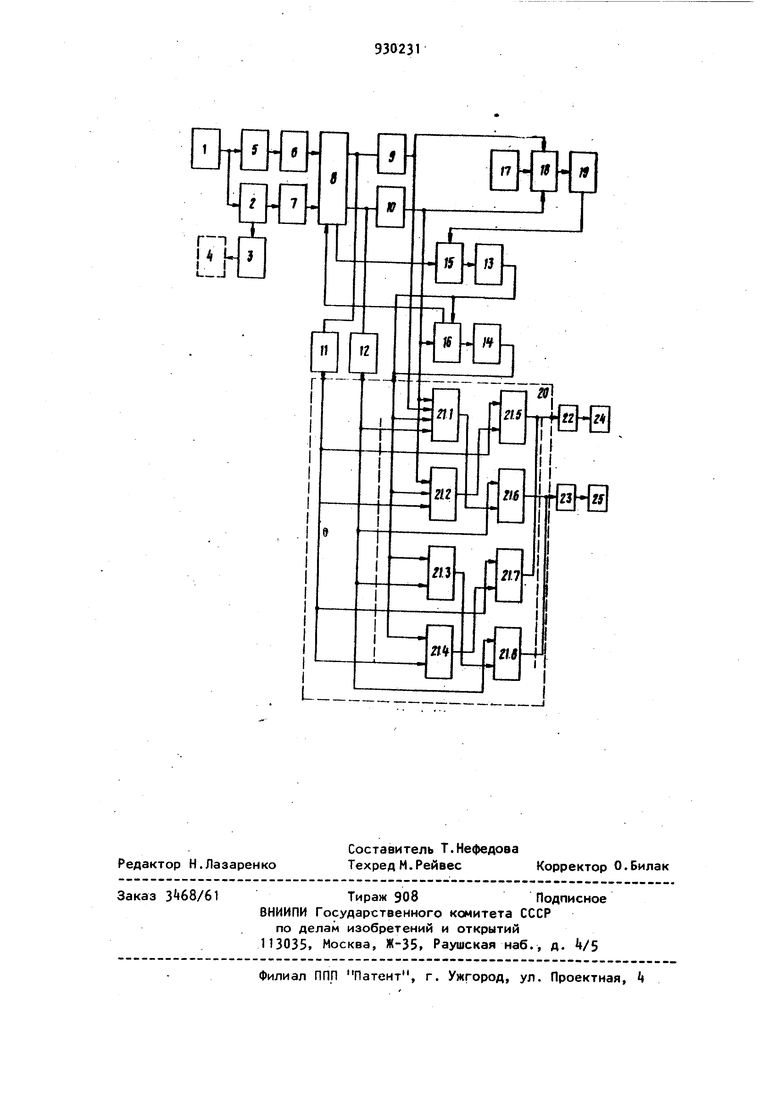
Цель, изобретения - повышение точностиработы привода. Эта цель достигается тем, что в электрогидравлический следящий привод введены первый и второй преобразователи напряжения, второй блок сравнения, третий и четвертый клюми, формирователь одиночных импульсов, генератор синусоидального напря жения и мультивибратор, подключенный выходом к третьему входу элемента ИЛИ, первый и второй входы второго блока сравнения соединены соответственно с третьим вь1ходом первого блока сравнения и выходом генератора линейнризменяющегося напряжения, а выход через третий люч - с третьим входом блока управ ления, выходом четвертого ключа и первым входом формирователя одиночных импульсов, второй вход которого соединен с выходом второго порогового , а первый и второй выходы соответственно с входом четвертого ключа и третьим входом первого блока сравнения, первый и второй входы которого соединены соответственно чере первый и второй преобразователи напряжения с выходом задающего блока и с вторым выходом датчика перемещения а первый и второй выходы через первы и второй ключи - с четвертым и пятым входами блока управления, а (Генератор синусоидального сигнала подключе к входам задающего блока и датчика перемещения. На чертеже приведена функциональная схема электрогидравлического следящего привода. Привод содержит генератор 1 синусоидального напряжения, датчик 2 перемещений, гидроусилитель 3 исполнительный элемент Ц, задающий блок 5 первый и второй преобразователи 6 и 7 напряжения,, первый блок 8 сравнения, первый и второй пороговые блоки 9 и 10, первый 11, второй 12, третий 13 и четвертый 14 ключи, второй блок 15 сравнения, формирователь 16 одиночных импульсов, мультивибратор 17, элемент ИЛИ 18, генератор 19 линейноизменяющегося напряжения, блок 20 управления, состоящий из элементов ИЛИ 21,1, 21,2,...21.8, первый и второй усилители 22 и 23 первый и второй электромагниты ( гидр усилителя) 2 и 25. Привод работает следующим образом . Сигнал с генератора 1 синусоидального напряжения подается на датчик 2 перемещения и задающий блок 5, откуда сигнал, амплитуда которого зависит от относительного положения подвижных частей датчика 2 перемещения и задающего блока 5, поступает на первый и второй преобразователи 6 и 7 напряжения, где преобразуется в постоянный сигнал. При рассогласовании упомянутых преобразователей 6 и 7 разностный сигнал по амплитуде выделяется в первом блоке 8 сравнения и поступает на вход первого порогового блока 9 точного отсчета и вход второго порогового блока 10 грубого отсчета, а также на первый и второй ключи 11 и 12 и второй блок 15 сравнения. При рассогласовании сигналов с датчика 2 перемещений и задающего блока 5, когда напряжение рассогласо I .вания больше порога срабатывания второго порогового блока 10, сигнал с выхода второго порогового блока 10 .через элемент ИЛИ 18 запрещает включение генератора линейноизменяющегося напряжения 19 и через блок управления 20 включает первый (второй электромагнит 2k (25). При этом рабочий орган гидроусилителя 3 движется вправо (влево). Порядок включения первого и второго электромагнитов 2 и 25 определяют первый и второй ключи 11 и 12, сигналы на выходе которых определяются полярностями сигналов на выходах первого блока 8 сравнения. При достижении напряжением рассогласования величины, равной порогу срабатывания второго перового блока 10, сигнал с его выхода снимается, включается формирователь 16 одиночных импульсов фиксированной длительности и через четвертый ключ 1 и блок 20 управления включается второй ( первый электромагнит 25 (2Ц). При этом рабочий орган гидроусилителя 3 прекращает движение. В этот момент схема обеспечивает сохранение напряжения на первом и втором электромагнитах 2k и 25, подается сигнал на третий вход первого блока 8 сравнения, тем самым исключается процесс сравнивания, обеспечивается одновременное снятие напряжения с первого и второго электрома - нитов 2 и 25 и задержка включения первого и второго блоков 8 и 15 сравнения на время, необходимое для возвращения первого и второго электромагнитов 2А и 25 в исходное положение под действием пружины ( на чертеже не показана. Напряжение рассогласования между величинами порогов точного и грубого отсчетов выбйрается таким, чтобы при вклю чении второго электромагнита 25 напряжение рассогласования стало мен ше величины порога точного отсчета. При рассогласовании больше величины порога точного отсчета, но мень ше величины порога грубого отсчета сигнал с выхода первого порогового блока 9 через блок 20 управления включает первый ( второй) электро магнит 2k (25) и рабочий орган гидро усилителя 3 движется вправо (влево). Сигналы с выхода первого порогового блока 9 через элемент ИЛИ 18 и мультивибратора 17 включает генератор 19 линейноизменяющегося напряжения, который выдает сигнал на второй блок 15 сравнения. При равенстве напряжения рассогласования и линейно изменяющегося напряжения с генератора 19 через третий ключ 13 и блок 20 управления включается второй (первый .электромагнит 25) - Рабочий орган гидроусилителя 3 останавливается. В этот момент схемой обеспечивается подача напряжения на оба электромагнита 2k и 25, подача сигнала на третий вход первого блока 8 сравнения, тем самым исключается процесс сравне ния, обеспечивается одновременное снятие напряжения с первого и второго электромагнитов 2 и 25 и задер ка включения первого и второго блоков 8 и 15 сравнения на время, необходимое для возвращения обоих электромагнитов 2k и 2S в исходное положение. Таким образом, максимальное или минимальное перемещение рабочего органа гидроусилителя 3 осуществляется на максимальной скорости и с заданной точностью, причем генератор линейноизменяющегося напряжения 19 работает только при малом перемещении не больше времени срабатывания какого-либо электромагнита, которое составляет порядка единиц миллисекунд. Использование изобретения позволит повысить точность работы привода. . 1 Формула изобретения Электрогидравлический следящий привод, содержащий первый и второй ключи, задающий блок, датчик перемещения , первый выход которого соединен с гидроусилителем, первый блок сравнения, первый и второй выходы которого подключены соответственно через первый и второй пороговые блоки к первым и вторым входам блока управления и элемента ИЛИ, выход которого соединен с входом генератора линейноизменяющегося напряжения, . а первый и второй выходы блока управления соединены соответственно через первый и второй усилители с первым и вторым электромагнитами, о тличающийся тем, что, с целью повышения точности привода, он содержит первый и второй преобразователи напряжения, второй блок сравнения, третий и четвертый ключи, формирователь одиночных импульсов, генератор синусоидального напряжения и мультивибратор, подключенный выходом к третьему входу элемента ИЛИ, первый и второй входы второго блока сравнения соединены соответственно с третьим выходом первого блока сравнения и выходом генератора линейноизменяющегося напряжения, а выход через третий ключ - с третьим входом блока управления, выходом . четвертого ключа и первым входом формирователя одиночных импульсов, -второй вход которого соединен с выходом второго порогового блока, а первый и второй выходы - соответственно с входом четвертого ключа и третьим входом первого блока сравнения, первый и второй входы которого соединены соответственно через первый и второй преобразователи напряжения с выходом задающего блока и с вторым выходом датчика перемещения, а первый и второй выходы через первый и второй ключи - с четвертым и пятым входами блока управления, а генератор синусоидального сигнала подключен к входам задающего блока и датчика перемещения. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР (f , кл. G Ok В 11/00, 19652.Авторское свидетельство СССР по заявке № ,кл.С 05 В 11/01, 1977, (прототип).
