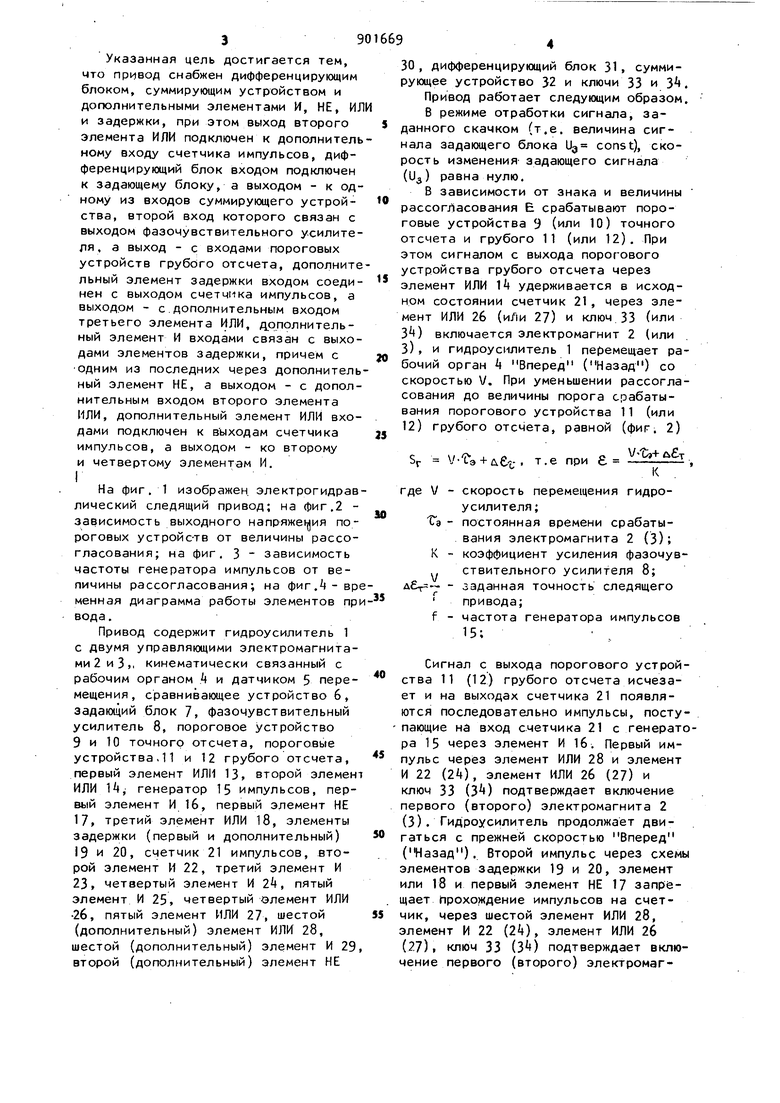
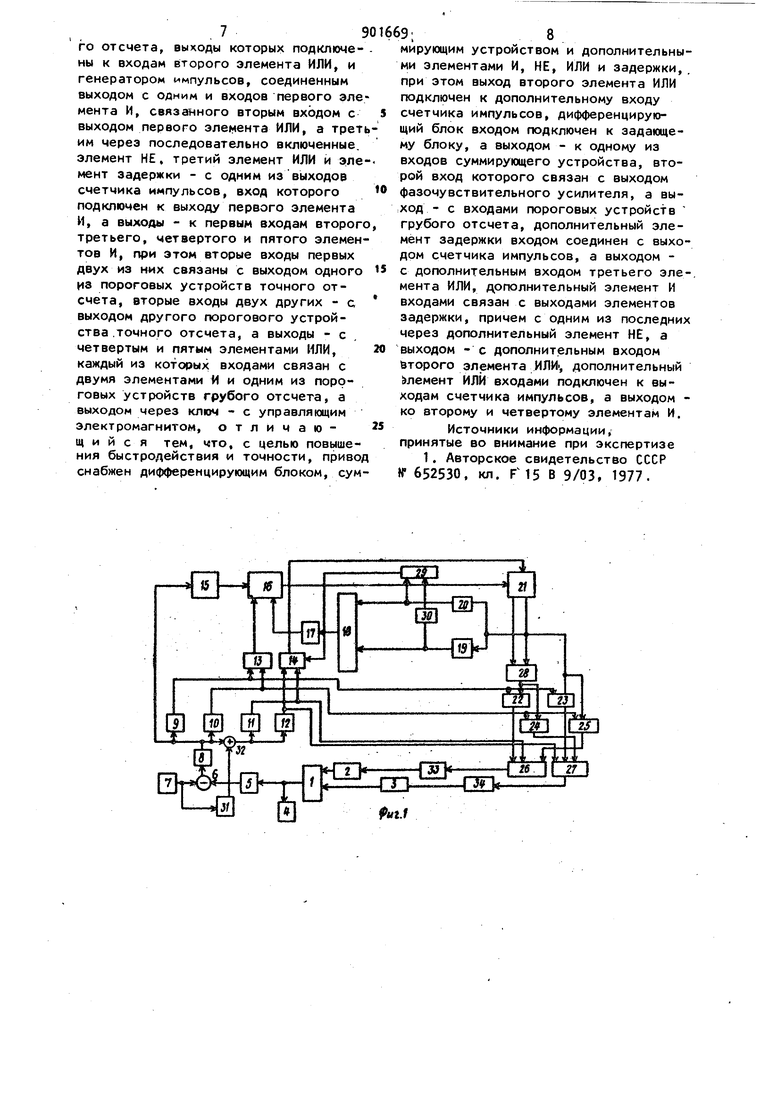
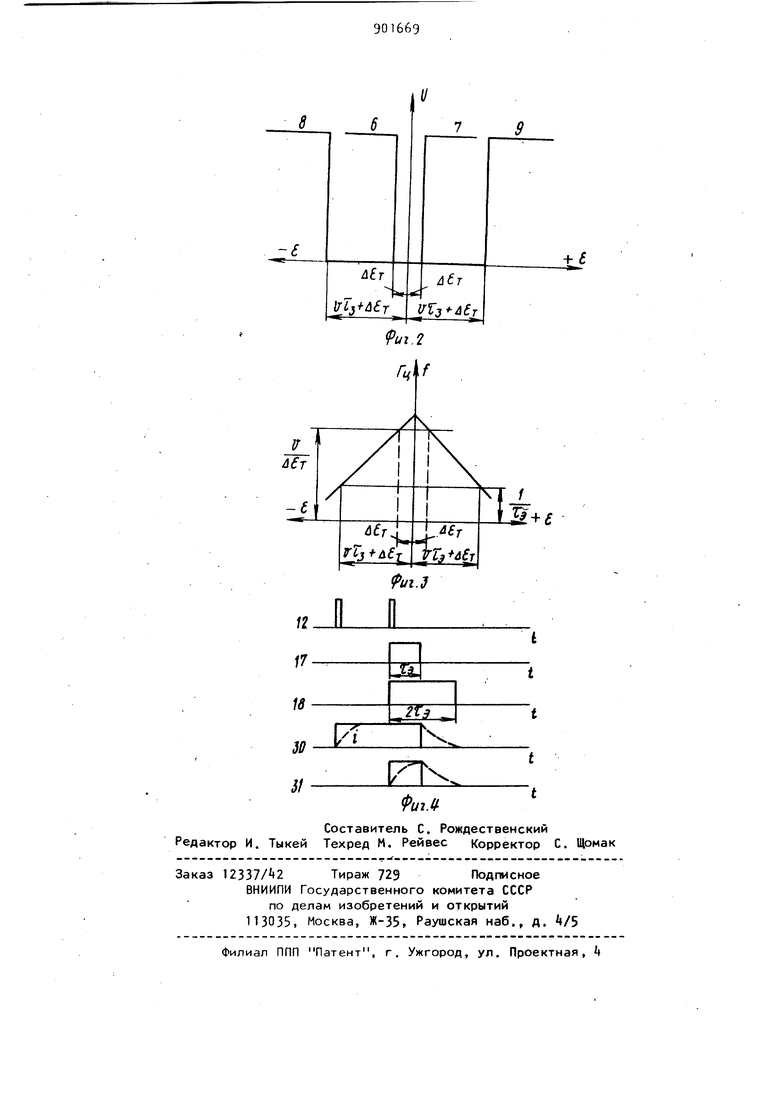
39 Указанная цель достигается тем, что привод снабжен дифференцирующим блоком, суммирующим устройством и дополнительными элементами И, НЕ, ИЛ и задержки, при этом выход второго элемента ИЛИ подключен к дополнитель ному входу счетчика импульсов, дифференцирующий блок входом подключен к задающему блоку, а выходом - к одному из входов суммирующего устройства, второй вход которого связан с выходом фазочувствительного усилителя , а выход - с входами пороговых устройств грубого отсчета, дополните льный элемент задержки входом соеди нен с выходом счетч11ка импульсов, а выходом - с.дополнительным входом третьего элемента ИЛИ, дополнительный элемент И входами связан с выходами элементов задержки, причем с одним из последних через дополнитель ный элемент НЕ, а выходом - с дополнительным входом второго элемента ИЛИ, дополнительный элемент ИЛИ входами подключен к выходам счетчика импульсов, а выходом - ко второму и четвертому элементам И. На фиг, 1 изображен, электрогидрав лический следящий привод; на фиг.2 зависимость выходного напряже1 ия пороговых устройств от величины рассогласования; на фиг. 3 зависимость частоты генератора импульсов от вепичины рассогласования; на фиг,4 - вр менная диаграмма работы элементов пр вода. Привод содержит гидроусилитель 1 с двумя управляющими электромагнитами 2 и 3,, кинематически связанный с рабочим органом .Ц и датчиком 5 перемещения, сравнивающее устройство 6, задающий блок 7, фазочувствительный усилитель 8, пороговое устройство 9 и 10 точного отсчета, пороговые устройства.11 и 12 грубого отсчета, первый элемент ИЛИ 13, второй элемен ИЛИ Н, генератор 15 импульсов, первый элемент И 16, первый элемент НЕ 17, третий элемент ИЛИ 18, элементы задержки (первый и дополнительный) 19 и 20, счетчик 21 импульсов, второй элемент И 22, третий элемент И 23, четвертый элемент И 24, пятый элемент И 25, четвертый элемент ИЛИ 26, пятый элемент ИЛИ 27, шестой (дополнительный) элемент ИЛИ 28, шестой (дополнительный) элемент И 29 второй (дополнительный) элемент НЕ 4 30, дифференцирующий блок 31, суммирующее устройство J2 и ключи 33 и 3. Привод работает следующим образом. В режиме отработки сигнала, заданного скачком (т.е. величина сигнала задающего блока Ug const), скорость изменения задающего сигнала (и) равна нулю. В зависимости от знака и величины рассогласования Е срабатывают пороговые устройства 9 (или 10) точного отсчета и грубого 11 (или 12). При этом сигналом с выхода порогового устройства грубого отсчета через элемент ИЛИ 14 удерживается в исходном состоянии счетчик 21, через элемент ИЛИ 26 (и/1и 27) и ключ.33 (или 34) включается электромагнит 2 (или . З), и гидроусилитель 1 перемещает рабочий орган 4 Вперед (Назад) со скоростью V. При уменьшении рассогласования до величины порога срабатывания порогового устройства 11 (или 12) грубого отсчета, равной (фиг. 2) Sr + . т.е при К где V - скорость перемещения гидроусилителя;Гэ - постоянная времени срабатывания электромагнита 2 (З); К - коэффициент усиления фазочувствительного усилителя 8; - заданная точность следящего привода; f - частота генератора импульсов 15; Сигнал с выхода порогового устройства 11 (12) грубого отсчета исчезает и на выходах счетчика 21 появляются последовательно импульсы, поступающие ни вход счетчика 21 с генератора 15 через элемент И 16. Первый импульс через элемент ИЛИ 28 и элемент И 22 (2k), элемент ИЛИ 2б (27) и ключ 33 (34) подтверждает включение первого (второго) электромагнита 2 (3). Гидроусилитель продолжает двигаться с прежней скоростью Вперед (Назад). Второй импульс через схемы элементов задержки 19 и 20, элемент или 16 и первый элемент НЕ 17 запрещает прохо.ждение импульсов на счетчик, через шестой элемент ИЛИ 28, элемент И 22 (2k}, элемент ИЛИ 26 (27), ключ 33 (34) подтверждает включение первого (второго) электромагнита 2 (3), через элемент И 23 (25), элемент ИЛИ 27 (26) включает ключ 3 (33) . При этом через время &; включается второй первый) электромагнит 3 (.2) . Шток гидроусилителя останавливается. После исчезновения сигнала на пер вом элементе задержки 19 через элемент НЕ 30, элемент И 29 и элемент ИЛИ Т .сбрасывается счетчик 21 при этом с электромагнитов снимается сигнал и они отпускают гидроусилител 1 . После исчезновения сигнала с выход второго элемента задержки 20 система приходит в исходное состояние. Таким образом рассогласование У-Гэ + К отрабатывается на полной скорости. При рассогласовании + включается тольКко пороговое устройство 9 (Ю) точно го отсчета, импульсы, через элемент ИЛИ 28, элемент И 22 (2k), элемент ИЛИ 26 (27) и через ключ 33 (3) включают электромагнит 2 (З) , элемен ИЛИ 18 и первый элемент НЕ 17 запрещает прохождение импульсов на счетчик; через шестой элемент ИЛИ 28, элемент И 22 (2), элемент ИЛИ 26 (27) и ключ 33 (З) подтверждает вкл чение первого (второгоУэлектромагни та 2 (3), через элемент И 23 (25), элемент ИЛИ 27 (25) включает ключ З (33). при этом через время tTg включается второй (первый) электромагнит 3 (2) и рабочий орган останавливается После исчезновения сигнала на первом элементе задержки 19 через второй элемент НЕ 30, элемент И 29 и второй элемент ИЛИ k сбрасывается счетчик при этом с первого 2 и второго 3 эле ктромагнитов снимается сигнал и они отпускают гидроусилитель 1. После исчезновения сигнала с выхода элемента задержки 20 система приходит в исходное состояние. Таким образом за время между дву мя импульсами шток отрабатывают пере мещение ,. де - , где f - частота генератора 15 импуль сов. При этом, если оставшееся расогласование будет меньше порога сраатывания порогового устройства 9 (10) точного отсчета, который определяет необходимую точность работы привода, то привод останавливается. Если при исчезновении сигнала со второго элемента задержки 20, рас-, согласование будет больше порога срабатывания порогового устройства 9 (10) точного отсчета, то на счетчик 21 поступит два импульса и привод сделает еще один шаг. Далее процесс повторяется до тех пор, пока не будет отработано задан-. ное рассогласование с заданной точностью. Видно (фиг. ), что, если при рассогласовании равном частота генератора 15 импульсов будет равна Т (Гц), а при рассогласовании, равном д.7, частота генератора 15 импульсов равна У , то любое рассогласование будет л&т отрабатываться за один шаг.Изменял зависимость f F(6), можно обеспечить, устойчивую работу при.вода при любой заданной томности . В режиме слежения Ujconst и U,V. Если при этом Ke+Vb Vt., «то слежение будет происходить с максимальной скоростью. При из lt +д.т- устройство работает в режиме обработки сигнала Us const. Использование предлагаемого устройства позволит увеличить быстродействие, статическую и динамическую точность перемещения рабочих органов производственных механизмов, что значительно увеличит их производительность , повысит качество выпускаемой продукции. Формула-изобретения Электрогидравлйческий следящий привод, содержащий гидроусилитель с двумя управляющими электромагнитами, кинематически связанный с рабочим органом и датчиком перемещения, подключенным к одному из входов сравнивающего устройства, второй вход которого связан с задающим блоком, а выход через фазочувствительный усилитель с двумя пороговыми устройствами точного отсчета, выходы которых- подключены к входам первого элемента ИЛИ, двумя пороговыми устройствами грубого отсчета, выходы которых подключены к входам второго элемента ИЛИ, и генератором импульсов, соединенным выходом с одним и входов первого эле мента И, связанного вторым входом с выходом первого элемента ИЛИ, а трет им через последовательно включенные, элемент НЕ, третий элемент ИЛИ и Э1ле мент задержки - с одним из выходов счетчика импульсов, вход которого подключен к выходу первого элемента И, а выходы - к первым входам второг третьего, четвертого и пятого элемен тов И, при этом вторые входы первых двух из них связаны с выходом одного из пороговых устройств точного отсчета, вторые входы двух других - с выходом другого порогового устройства .точного отсчета, а выходы - с четвертым и пятым элементами ИЛИ, каждый из которых входами связан с двумя элементами И и одним из пороговых устройств грубого отсчета, а выходом через ключ - с управляющим электромагнитом, отличающийся тем, что, с целью повышения быстродействия и точности, приво снабжен дифференцирующим блоком, сум мирующим устройством и дополнительными элементами И, НЕ, ИЛИ и задержки,. при этом выход второго элемента ИЛИ подключен к дополнительному входу счетчика импульсов, дифференцирующий блок входом подключен к задающему блоку, а выходом - к одному из входов суммирующего устройства, второй вход которого связан с выходом фазочувствительного усилителя, а выход - с входами пороговых устройств грубого отсчета, дополнительный элемент задержки входом соединен с выходом счетчика импульсов, а выходом с дополнительным входом третьего эле-, мента ИЛИ, дополнительный элемент И входами связан с выходами элементов задержки, причем с одним из последних через дополнительный элемент НЕ, а выходом - с дополнительным входом второго элемента ИЛИ-, дополнительный Элемент ИЛИ входами подключен к выходам счетчика импульсов, а выходом ко второму и четвертому элементам И. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 652530. кл. Г 15 В 9/03, 1977.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий привод | 1977 |
|
SU652530A1 |
| Электрогидравлический следящий привод | 1977 |
|
SU732802A1 |
| Электрогидравлический следящий привод | 1978 |
|
SU802918A1 |
| Электрогидравлический следящий при-ВОд | 1979 |
|
SU798709A1 |
| Электрогидравлический следящий привод | 1979 |
|
SU930231A1 |
| Электрогидравлический следящий привод | 1982 |
|
SU1049863A2 |
| Устройство для измерения защищенности сигнала от помех | 1989 |
|
SU1658400A2 |
| Следящая система | 1979 |
|
SU903803A2 |
| Электрогидравлический следящий привод | 1977 |
|
SU732805A1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2368857C1 |
ful.f
«JLJ
