(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САМОХОДНОЙ МАШИНЫ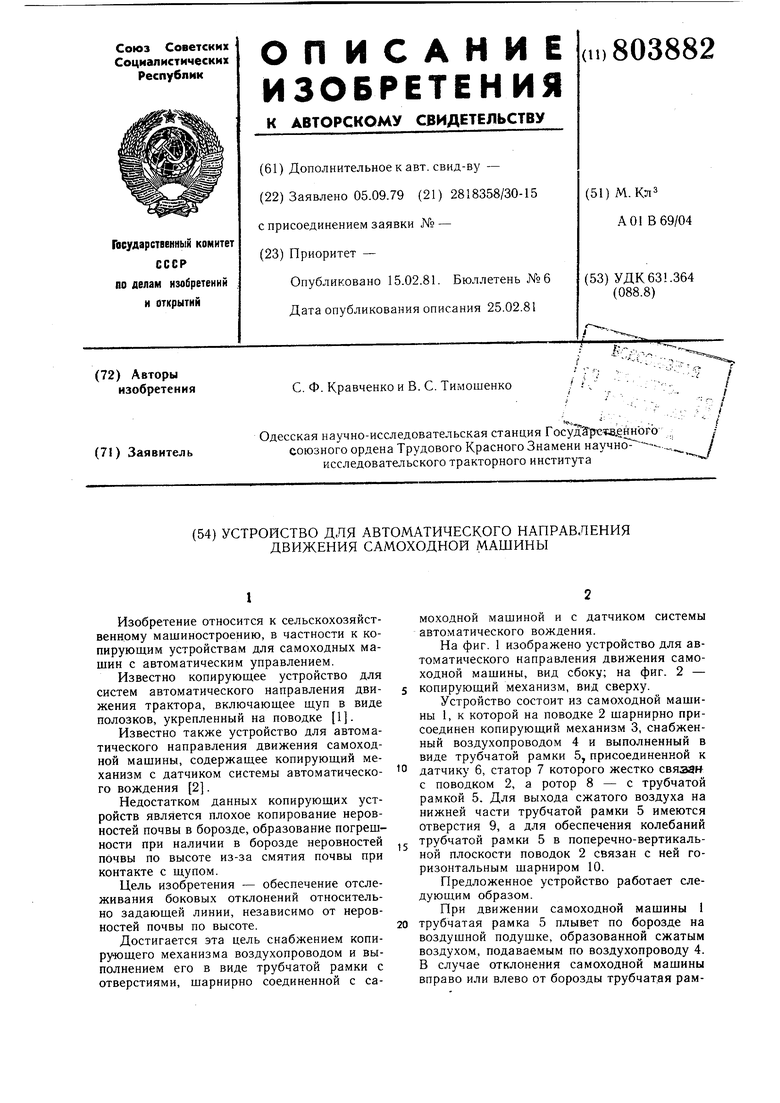
| название | год | авторы | номер документа |
|---|---|---|---|
| Лесопосадочная машина | 1947 |
|
SU76394A1 |
| Копирующее устройство срезающего аппарата капустоуборочной машины | 1979 |
|
SU982574A1 |
| СПОСОБ КВАДРАТНОГО РАЗМЕЩЕНИЯ СЕМЯН, КЛУБНЕЙ (ГНЕЗДАМИ) ИЛИ РАССАДЫ | 1954 |
|
SU102108A1 |
| Универсальный самоходный хлопкоуборочный комбайн | 1991 |
|
SU1819527A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ ТРАКТОРНОГО АГРЕГАТА | 1969 |
|
SU257898A1 |
| Копирующее устройство для автоматического направления движения сельскохозяйственного агрегата | 1982 |
|
SU1042639A1 |
| Устройство для автоматического направления движения самоходной сельскохозяйственной машины | 1980 |
|
SU948308A1 |
| Картофелеуборочный комбайн | 1987 |
|
SU1768057A1 |
| ПОСЕВНАЯ СЕКЦИЯ АНКЕРНОГО ТИПА | 2014 |
|
RU2569630C2 |
| СПОСОБ ПОСЕВА ЗЕРНОВЫХ КУЛЬТУР И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2308181C1 |
1
Изобретение относится к сельскохозяйственному машиностроению, в частности к копирующим устройствам для самоходных машин с автоматическим управлением.
Известно копирующее устройство для систем автоматического направления движения трактора, включающее щуп в виде полозков, укрепленный на поводке 1.
Известно также устройство для автоматического направления движения самоходной машины, содержащее копирующий механизм с датчиком системы автоматического вождения 2.
Недостатком данных копирующих устройств является плохое копирование неровностей почвы в борозде, образование погрешности при наличии в борозде неровностей почвы по высоте из-за смятия почвы при контакте с щупом.
Цель изобретения - обеспечение отслеживания боковых отклонений относительно задающей линии, независимо от неровностей почвы по высоте.
Достигается эта цель снабжением копирующего механизма воздухопроводом и выполнением его в виде трубчатой рамки с отверстиями, шарнирно соединенной с самоходнои машиной и с датчиком системы автоматического вождения.
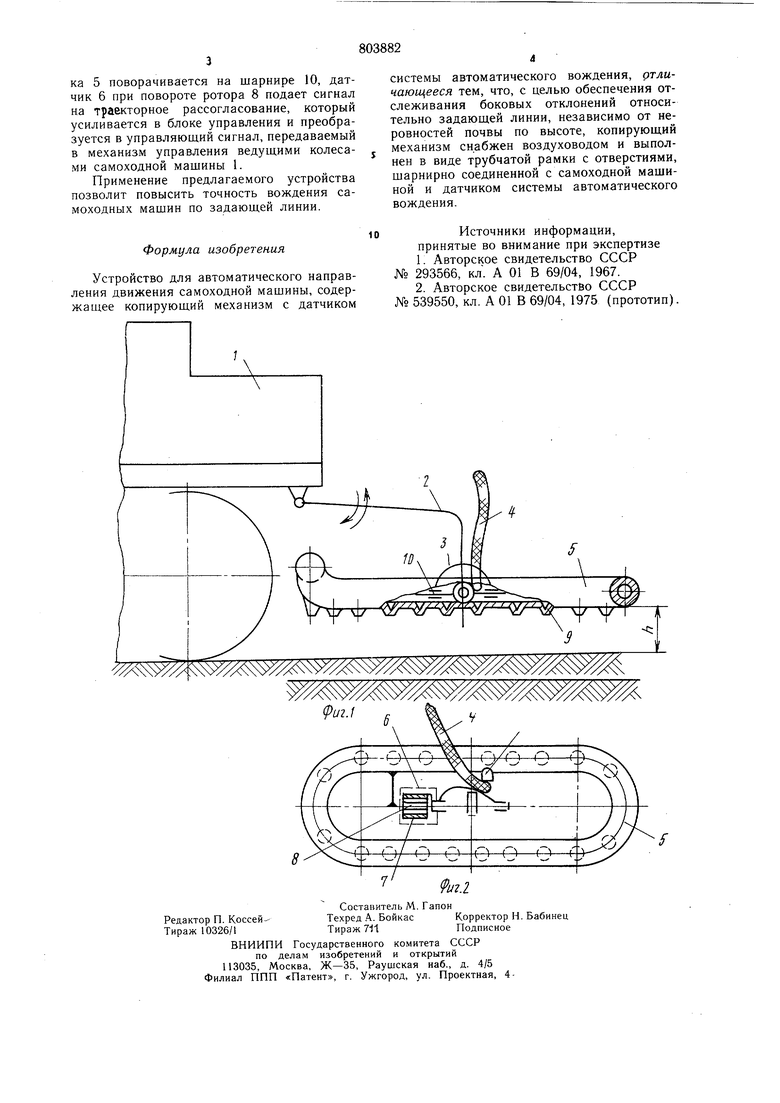
На фиг. 1 изображено устройство для автоматического направления движения самоходной машины, вид сбоку; на фиг. 2 - копирующий механизм, вид сверху.
Устройство состоит из самоходной мащины 1, к которой на поводке 2 щарнирно присоединен копирующий механизм 3, снабженный воздухопроводом 4 и выполненный в виде трубчатой рамки 5, присоединенной к
0 датчику 6, статор 7 которого жестко связан с поводком 2, а ротор 8 - с трубчатой рамкой 5. Для выхода сжатого воздуха на нижней части трубчатой рамки 5 имеются отверстия 9, а для обеспечения колебаний трубчатой рамки 5 в поперечно-вертикальной плоскости поводок 2 связан с ней горизонтальным щарниром 10.
Предложенное устройство работает следуюш,им образом.
При движении самоходной машины 1 трубчатая рамка 5 плывет по борозде на воздушной подушке, образованной сжатым воздухом, подаваемым по воздухопроводу 4. В случае отклонения самоходной машины вправо или влево от борозды трубчатая рам
