1
Изобретение относится к грузозахватным устройствам, конструктивно сопряженным с оборудованием для Лормирования изделий строительной керамики, и может быть использовано в манипуляторах для группового переноса отформованных изделий, напри- , мер кирпича, от пресса.
Известен пневматический захват для одновременного переноса группы кирпичей, выложенных рядами на плоскости с соблюдением заданных промежутков между ними, состоящий из ра Nbj и перегородок, расположенных между кирпичами, перегородки снабжены надувными эластичными камерами. При подаче сжатого воздуха стенки эластичных камер раздуваются и сжимают кирпич, после чего рама переносится манипулирующими устройствами к месту разгрузки, где давление в камерах снимается и кирпич или другое изделие освобождается.
Недостатки известного группового захвата следующие: за сравнительно короткое время работы эластичные стенки изнашиваются (.протираются, прокалываются) или деформируются (вытягиваются) настолько, что не возвращаются в исходное положение
после снятия давления в пневмокамерах, эластичные стенки камер не равномерно давят на захватываемые изделия: с больишм усилием в середине, ; с меньшим к периферии, поэтому, чтобы удержать таким захватом изделие, необходимо создавать в камерах такое давление, при котором изделия могут либо деформироваться, либо разру0шаться, а чтобы этого избежать, необходимо увеличивать полезный ход эластичной стенки камеры.
Известен также групповой захват для переноса кирпича, на раме которого смонтированы крайние и внутренние подушки, перегородки и коллектор. Крайние подушки выполнены из перегнутого пополам воздухонепроницаемого полотна, внутри которого свободно
0 заложен прямой стержень вдоль всей длины подушки, в верхней части прикрепленной к опорной вертикальной пластине, а внутренние подушки выполнены с Т-образным стержнем, плот5но обтянутым по проЛилю воздухонепроницаемым полотном. В ненадутом состоянии коллектор соединяют с вакуум-насосом или всасывающим патрубком вентилятора. При этом воздухоие0 проницаемое полотно всех подушек прижимается к заложенным внутри стержням. После ввода захвата в промежутки между кирпичами коллектор подключают к сети сжатого воздуха, и кирпичи обжимаются.
Такой конструкции присущи все недостатки первого захвата за исключением Того, что он и-меет увеличенный полезный ход подушки. Однако для того, чтобы эластичные элементы подушки возвращались в исходное положение, необходимо групповой захват подключать к вакуум-насосу.
Цель изобретения - повышение долговечности и надежности в работе, а также сокращение брака переносимых изделий.
Поставленная цель достигается тем что групповой пневматический захват, содержащий закрепленные на раме щеки, выполненные из опорных элементов, надувных камер с эластичны«ш стенками из. листовой резины, соединенных с источниками сжатого воздуха, снабжен жесткими прижимами, ограничителями хода и возвратными пружинами, при этом на наружной стороне эластичных стенок надувных камер прикреплены ограничители хода жестких прижимов, выполненных с упругой облицовкой, а возвратные пружины установлены на опорных элементах.
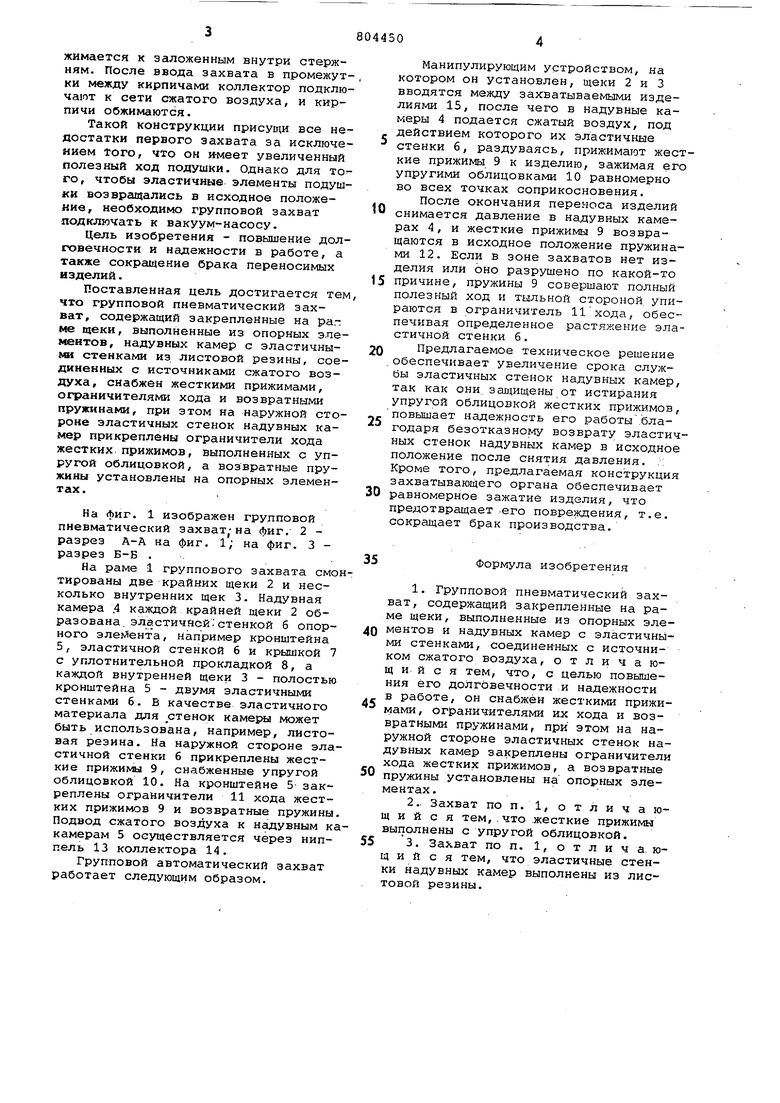
На фиг. 1 изображен групповой пневматический захват,-на фиг. 2 разрез А-А на фиг. 1; на фиг. 3 разрез Б-Б .
На раме 1 группового захвата смотированы две крайних щеки 2 и несколько внутренних щек 3. Надувная камера .4 каждой крайней щеки 2 образована, эластичней-стенкой 6 опорного элемента, например кронштейна 5, эластичной стенкой 6 и крышкой 7 с уплотнительной прокладкой 8, а каждой внутренней щеки 3 - полостью кронштейна 5 - двумя эластичными стенками 6. В качестве эластичного материала для стенок камеры можег быть использована, например, листовая резина. На наружной стороне эластичной стенки б прикреплены жесткие прижи№л 9, снабженные упругой облицовкой 10. На кронштейне 5 закреплены ограничители 11 хода жестких прижимов 9 и возвратные пружины Подвод сжатого воздуха к надувным ккамерам 5 осуществляется через ниппель 13 коллектора 14.
Групповой автоматический захват работает следующим образом.
Манипулирующим устройством, на котором он установлен, щеки 2 и 3 вводятся между захватываемыми изделиями 15, после чего в надувные камеры 4 подается сжатый воздух, под , действием которого их эластичные стенки б, раздуваясь, прижимают жесткие прижимы 9 к изделию, зажимая его упругими облицовками 10 равномерно во всех точках соприкосновения.
После окончания переноса изделий
снимается давление в надувных камерах 4, и жесткие прижимы 9 возвращаются в исходное положение пружинами 12. Если в зоне захватов нет изделия или оно разрушено по какой-то
5 причине, пружины 9 совершают полный полезный ход и тыльной стороной, упираются в ограничитель 11хода, обеспечивая определенное растяжение эластичной стенки б.
Q Предлагаемое техническое решение обеспечивает увеличение срока службы эластичных стенок надувных камер, так как они. защищены от истирания упругой облицовкой жестких прижимов, повышает надежность его работы .благодаря безотказному возврату эластичных стенок надувных камер в исходное положение после снятия давления. .: Кроме того, предлагаемая конструкция захватывающего органа обеспечивает
0 равномерное зажатие изделия, что предотвращает -его повреждения, т.е. сокращает брак производства.
Формула изобретения
1. Групповой пневматический захват, содержащий закрепленные на раме щеки, выполненные из опорных элементов и надувных камер с эластичными стенками, соединен-ных с источником сжатого воздуха, отличающийся тем, что, с целью повышения его долговечности и надежности в работе, он снабжен жесткими прижимами, ограничителями их хода и возвратными пружинами, при этом на наружной стороне эластичных стенок надувных камер закреплены ограничители хода жестких прижимов, а возвратные пружины установлены на элементах .
2.. Захват поп.1, о тли ч а ющ и и с я тем,.что .жесткие прижимы выполнены с упругой облицовкой.
5 3. Захват по п. 1, отличающийся тем, что эластичные стенки надувных камер выполнены из листовой резины.
/4
| название | год | авторы | номер документа |
|---|---|---|---|
| Групповой захват для переноса кирпича | 1981 |
|
SU975414A1 |
| ГРУППОВОЙ ЗАХВАТ ДЛЯ ПЕРЕНОСА КИРПИЧА | 1973 |
|
SU363595A1 |
| Групповой захват для переноса кирпичей | 1980 |
|
SU958099A1 |
| Механический групповой захват | 1984 |
|
SU1207777A1 |
| Автомат для садки кирпича на печные вагонетки | 1978 |
|
SU766864A1 |
| Машина для кладки кирпича | 1987 |
|
SU1474241A1 |
| Групповой захват для кирпича | 1987 |
|
SU1470533A1 |
| УСТАНОВКА ДЛЯ СЪЕМА ОГНЕУПОРНЫХ ИЗДЕЛИЙ | 1973 |
|
SU364445A1 |
| КРЕСЛО С НАДУВАЕМЫМИ ОПОРНЫМИ ПОДУШКАМИ | 2004 |
|
RU2247523C1 |
| ГРУППОВОЙ ЗАХВАТ | 2000 |
|
RU2169074C1 |
10
If
