1
Изобретение относится к промышленности строительных материалов и может быть использовано в автоматах - yклaдv чинах кирпича или блоков йа печную вагонетку.
Известно устройство для укладки кир-;пича на тоннельные вагонетки, содержащее смонтированный в направляющих мостик (тележку), к которому подвешен групповой захват, состоящий из подвижной пли- ,(j ты с толкателями и неподвижной плиты, с которой щарнирно соединены приводные подпружиненные захваты, выполненные в виде щек, соединенных с двуплечим рычагом, и привод зажима .в виде элек- ,5 тромагнитон 1.
Недостатки этого устройства заключаются в том, что пружины захватов все время находится в деформированном состоянии (растянуты), в результате 20 появляется их остаточная деформадия к через продолжительный период работы за хвата удерживать изделия с помощью этих пружин становится невозможна Кро-ме того, щеки контактируют с кирпичами не плоскостью, а по линии, и зачастую возможен и точечный контакт из-за перекосов в щаршфах захватов и даже незначительной непараллельности щек. Кон:с1рукция группового захвата сложна, так как на каждый захватываемый кирпич используются два 14)иводных подпружиненных захвата, а небольшое 1расстояние между изделиями, обусловленное проведением качественного обжига и устойчивостью садки, предопределяет выполнение захватов с мкнимальиыми поперечными размерами и требует высокой точности изготовления и монтажа. Использование магнитов с почти мгновешаш срабатыванием вызывает удар щек. зажимов по кирпичу, в котсром появляются трещины, приводящие к разрушению изделий после обжига.
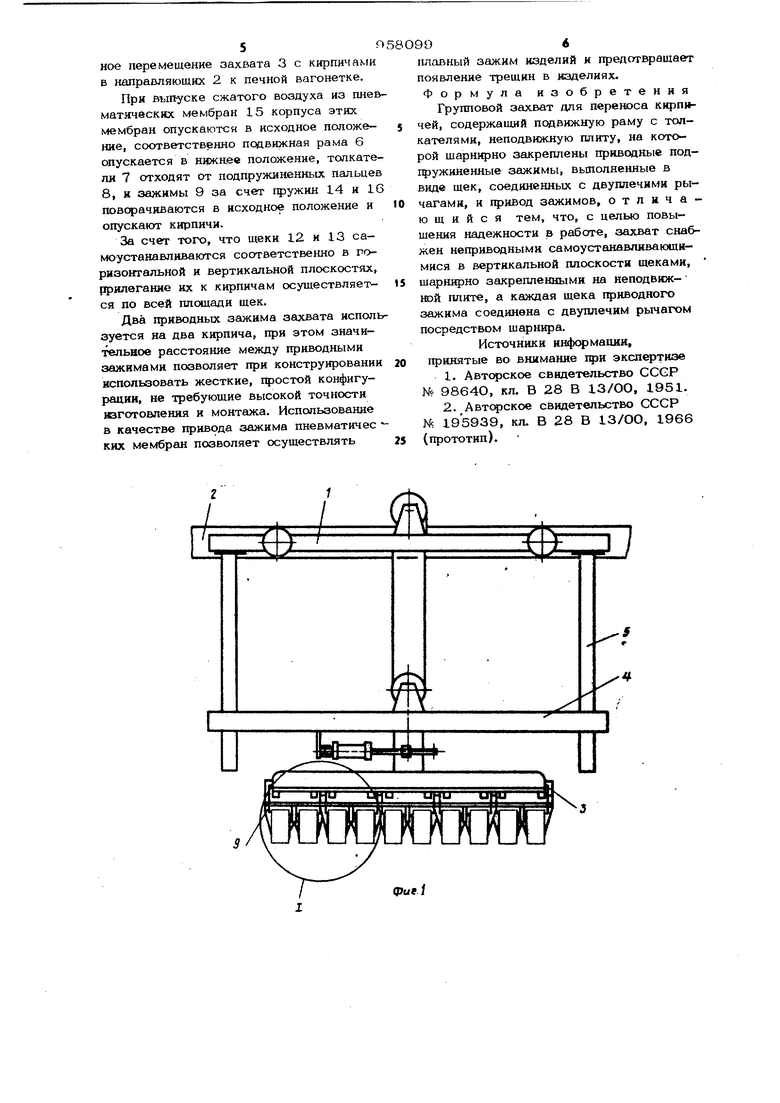
Наиболее близким к предлагаемому является групповой захват для переноса кирпичей, содержащий подвижную раму с толкателями, неподвижную плиту, на ко39торой ш нирно закреплены приводные пр жинные зажимы, вьшолненные в виде щек соединенных с двуплечими рычагами и пр вод зажимов 2. Однако щеки приводных подпружиненкых зажимов жестко соединены с двупле чими рычагами, что не обеспечивает пол ного прилегания плоскости щек к плоскос ти к фпича при зажиме в результате воз можной непараллельности его плоскостей либо различным налипанием на них, что уменьшает надежность работы захвата. Кроме того, на два кирпича необходимо четыре приводных зажима. Между кирпичами в садке в поперечном направлении необходимы зазоры для проведения качественного обжига. Конструкция щзотивопоставле1шого захвата рассчитана на захват кирпичей по длине, т.е. и здесь необходимы зазоры. При садке кир пичей на печную вагонетку их приходится сдвигать вручную. Установка толкателей и болтрв в конструкции захвата пред полагает болылое расстояние между неподвижной рамой и верхней плоскостью кирпича, что вызывает необходимость вьшолнять щеки с болыпим вылетом, а ирк больших усилиях зажима они могут деформироваться. Цель изобретения - повьшение надежности в работе. Поставленная цель достигается тем, что глупповой захват для переноса кирпичей, содержащий подвижную раму с толкателями, неподвижную плиту, на которой щарнирно закреплены приводные подпружиненные зажимы, вьшолненные в виде щек, соединенных с двуплечими рычагами, и привод зажимов, снабжен неприводными самоустанавливающимися в вертикальной плоскости щеками, щарнир- но закрепленными на неподвижной плите, а каждая щека щзиводного зажима соединена с двуплечим рычагом посредством щарнира. На фиг, 1 изображен хфедлагаемый групповой захват для переноса кирпича, вид сбоку; на фиг, 2 - узел I на фиг, 1 на фиг, 3 - вид А на фиг, 2; на фиг. 4 узел соединения двуплечего рычага со щекой; на фиг, 5 - разрез А-А на фиг, 4 Групповой захват для переноса кирпичей смонтирован на тележке 1 перешэса, установленной в направляющих 2 продольного перемещения. Групповой захват 3 прикреплен с возможностью поворота на 9О° к раме 4, подвюкной в вертикаль ной плоскости по щтангам 5, жестко за9крепленным на тележке 1 переноса. Групповой захват 3 состоит из подвижной рамы 6 с толкателями 7 коробчатого сечения, воздействующими через подпружиненные пальцы 8 на приводные зажимы 9, щарнирно смонтированные на неподвижной плите 10. Приводные зажимы выполнены в виде двуплечих рычагов Ц, соединенных посредством щарниров со щеками 12. Неприводные зажимы вьшолнены в виде щек 13 с пружинами 14 кручения, щарнирно прикрепленных к неподвижной плите 10. Вертикальное перемещение подвижной рамы 6 осуществляется пневматическими мембранами 15, жестко прикрепленными корпусом к подвижной раме 6, а щтоком - к неподвижной плите 1О. Приводные зажимы 9 попарно связаны между обой пружинами 16,. поворачивая их относительно сплощной оси 17 горизонтального щарнира. Рычаги 11 соединены осями18 щарниров со щеками 12. Групповой захват работает следующим образом. В исходном положении подвижная рама 6 находится в нижнем положении, толкатели 7 не воздействуют на подпружиненные пальцы 8, приводные зажимы 9 за счет пружин 16 повернуты таким образом, что щеки 12 оказываются раскрытыми, неприводные щеки 13 под воздействием гружин 14 также раскрыты. Рама 4 вертикального перемещения, перемещаясь по щтангам 5 тележки 1 переноса, опускает групповой захват 3 на кирпичи, при этом раскрытые щеки 12 и 13 свободно попадают в зазоры между кирпичами. При подаче сжатого воздуха в пневматические мембраны 15 щтоки их плавно выравниваются, и так как они прикреплены к неподвижной плите Ю, поднимается корпус (верхняя часть) мембран 15 и связанная с ним подвижная рама 6. Толкатели 7 подвижной рамы через подпружиненные пальцы 8 воздействуют на приводные зажимы 9, которые при этом поворачиваются вокруг оси щарнира и щеками 12 гфижимают кирпичи к неприводным щекам 13, причем последние самоустанавливаются в вертикальной плоскости за счет щарнирной связи с -неподвижной плитой 10, а щеки 12 самоустанавливаются в горизонтальной плоскости за счет luapнирной связи с двуплечими рычагами 11, Рама 4 вертикального перемещения поднимает групповой захват 3 с кирпичами, тележка 1 переноса осуществляет ирпдашное перемещение захвата 3 с кирпичами в направляющих 2 к печной вагонетке. При вып-уске сжатого воздуха из пнев матических мембран 15 корпуса этих мембран опускаются в исходное положение, соответственно подвижная рама 6 опускается в нижнее положение, толкате ли 7 отходят от подпружиненных пальцев 8, и зажимы 9 за счет пружин 14 и 1G поворачиваются в исходное положение и опускают кирпичи. За счет того, что щеки 12 и 13 самоустанавливаются соответственно в горизоигальной и вертикальной плоскостях, ррилегание их к кирпичам осуществляется по всей площади щек. Два приводных зажима захвата исполь зуется на два кирпича, при этом значительное расстояние между приводными зажимами позволяет при конструировании использовать жесткие, простой конфигурации, не требующие высокой точности нвготовления и монтажа. Использование в качестве привода зажима пневматичес ких мембран позволяет осуществлять Г 9 плавный зажим изделий и предотвращает появление трещин в изделиях. Формула изобретения Групповой захват для переноса кирпичей, содержащий подвижную раму с толкателями, неподвижную плиту, на которой щарнирно закреплены приводные подгфужиненные зажимы, выполненные в виде щек, соединенных с двуплечими рычагами, и привод зажимов, отличающийся тем, что, с целью повышения надежности в работе, захват снабжен неприводными самоустанавлнваюшимися в вертикальной плоскости щеками, щарнирно закрепленными на неподвюк1ЮЙ плите, а каждая щека приводного зажима соединена с двуплечим рычагом посредством щарнира. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 9864О, кл. В 28 В 13/ОО, 1951. 2.Авторское свидетельство СССР NC 195939, кл. В 28 В 13/ОО, 1966 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для переноса слоя кирпича на печную вагонетку | 1990 |
|
SU1787790A1 |
| Установка для съема кирпича с по-лОчНОй ВАгОНЕТКи и уКлАдКи ЕгО НАпЕчНую ВАгОНЕТКу | 1978 |
|
SU837887A1 |
| Автомат для садки кирпича на печные вагонетки | 1978 |
|
SU766864A1 |
| Автоматическая линия формирования садки кирпича на печной вагонетке | 1983 |
|
SU1178604A1 |
| Агрегат для перекладки изделий | 1978 |
|
SU763107A1 |
| УСТАНОВКА ДЛЯ САДКИ СЫРЦЫ-КИРПИЧА НА ПЕЧНУЮ ВАГОНЕТКУ | 1992 |
|
RU2043192C1 |
| Устройство для формирования группы кирпичей и переноса их на вагонетку | 1982 |
|
SU1071434A1 |
| ГРУППОВОЙ ЗАХВАТ | 2000 |
|
RU2169074C1 |
| Автоматическая линия погрузки кирпича на печные вагонетки | 1983 |
|
SU1159787A1 |
| Садчик кирпича на печные вагонетки | 1988 |
|
SU1622132A1 |


6 п I л /rfib /
B4idA в
