Изобретение относится к технологическому оборудованию для производ ства полупроводниковых приборов и может быть использовано для автоматической последовательной подачи и загрузки полупроводниковых приборов, например транзисторов и интегральных микросхем, преимущественно уложенных в технологические спутники-носители, коммутации выводов при боров с измерительным оборудованием и разгрузки приборов с разбраковкой на группы годности. Известно устройство для коммутации и разбраковки полупроводниковых интегральных схем, содержащее основание с наклонной неподвижной направляющей, две контактные колодки, механизм последовательной подачи интегральных схем и контактные коло ки, механический привод, измеритель блок управления и направляющую для разгрузки разбракованных приборов . Однако известное устройство не обеспечивает надежной последовательной подачи приборов на позиции измерения и загрузки-разгрузки, так как конструктивное выполнение механизма последовательной подачи при боров в виде двух параллельных плоскостей , образующих подвижные направляющие, пpивoдиt к возможному заклиниванию приборов между плоскостями направляющих при их встречном перемещении, а отсутствие элементов фиксации приборов на заданных плоскостях подвижных направляющих не обеспечивает поступление приборов на заданную позицию загрузки-разгрузки. Известно также устройство для климатических испытаний полупроводниковых приборов,содержащее рабочую камеру, накопительный транспортирую,ий барабан с-пазами для приборов, выполненный ступенчатым в нижней части, разгрузочное и загрузочное устройсргво (механизм подачи приборов ) , причем пазы размещены в радиальном направлении на всю глуби- . ну барабана, а разгрузочное устройство выполнено в виде кареток с приводом возвратно-поступательного движения, имеющих пазы для спутников с приборами и расположенных на уровне соответствующих ступеней барабанаОднако это устройство не обеспечивает высокую производительность измерения, так как загрузка, измерение и разгрузка приборов производятся последовательно на одной позиции и змерения и измерительное оборудование работает с перерывами на механические операции загрузки и рагрузки, а конструктивное выполнение механизма подачи приборов не обеспечивает последовательную подачу приборов на позиции измерение и загрузка-разгрузка.
Цель изобретения - повышение производительности работы..
Цель достигается тем, что устройство для контроля и разбраковки радиоэлементов, преимущественно полупроводниковых приборов и микросхем, содержащее размещеннь1й на основании загрузочный механизм с питателем, механизм подачи радиоэлементов, выполненный в виде двух связанных с приводным механизмом кареток, в которых выполнены пазы для прохода радиоэлементов, контактные колодки, измеритель, блок управления и раскладчик разбракованных радиоэлементов, снабжено двумя подпружиненными отсекателями, закрепленными на основании на уровне середины каждой каретки и двумя неподвижными разделительными пластинами, размещеными под каретками и подпружиненным прижимом, установленным на верхней каретке с возможностью взаимодействия с рсщиоэлементами, находящимися в питателе, причем в каждой кареке выполнены прорези для прохода отсекателей и дополнительные пазы для прохода радиоэлементов, расположенные на расстоянии от основных пазов, равном.величине хода каретки а в каждой разделительной пластине выполнены сквозные прорези, совпадающие с пазами кареток.
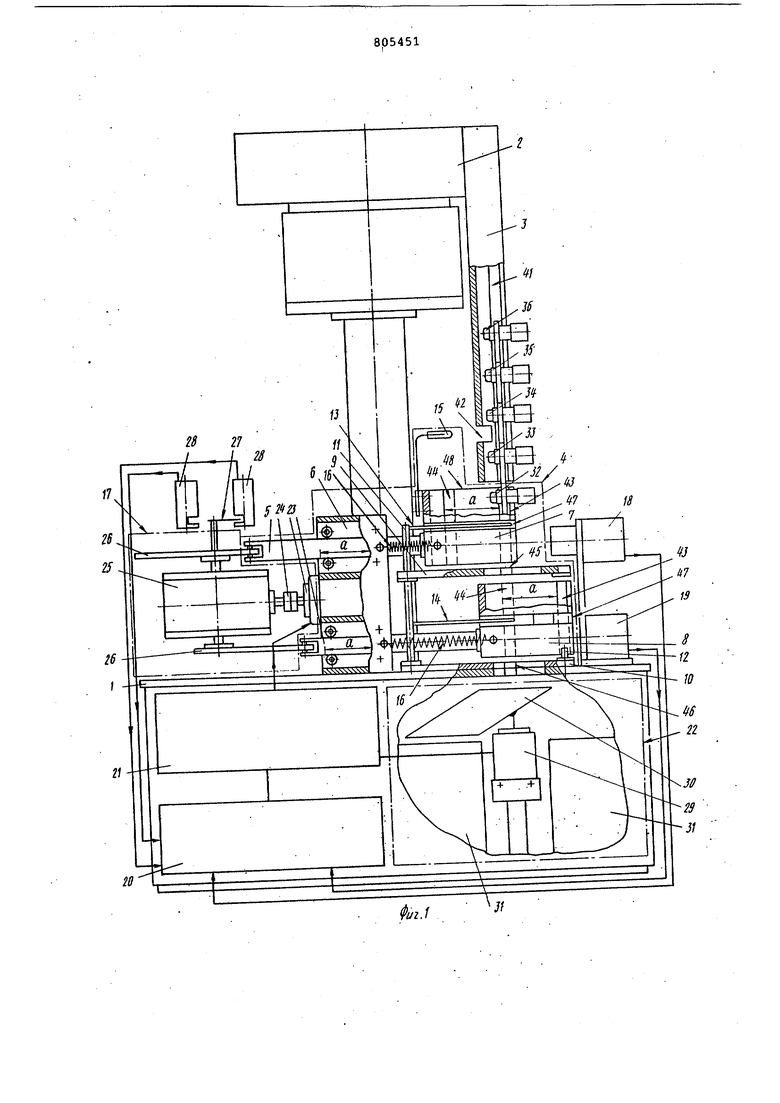
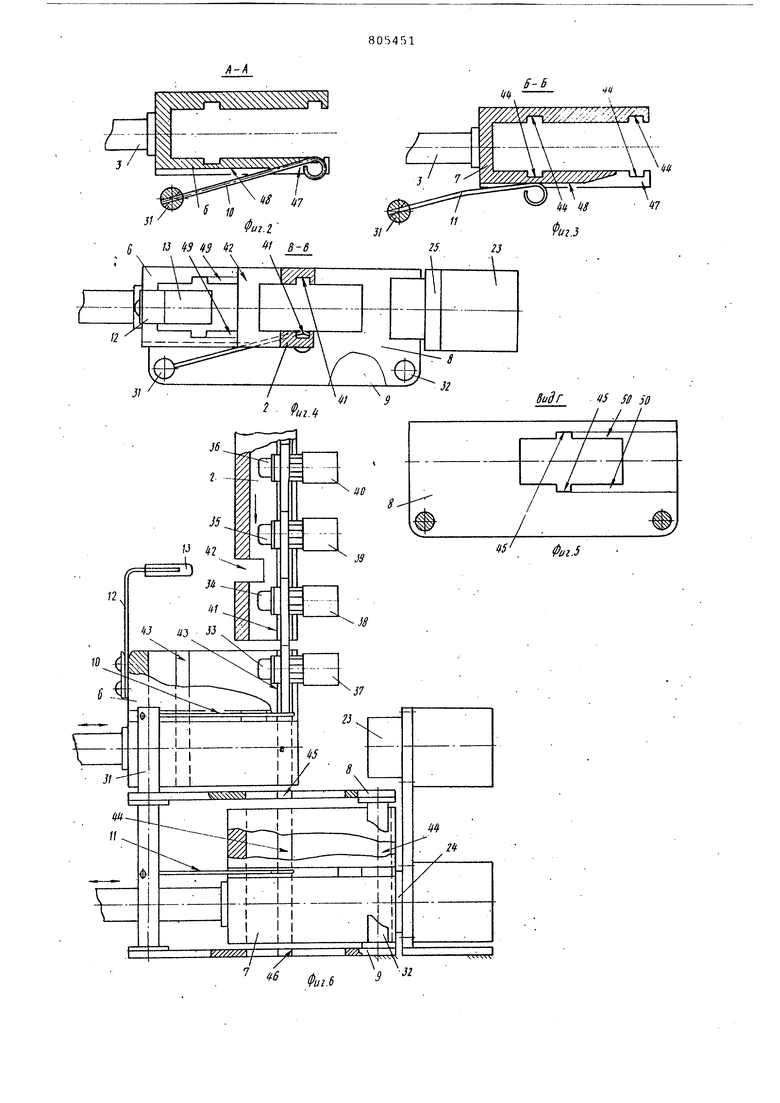
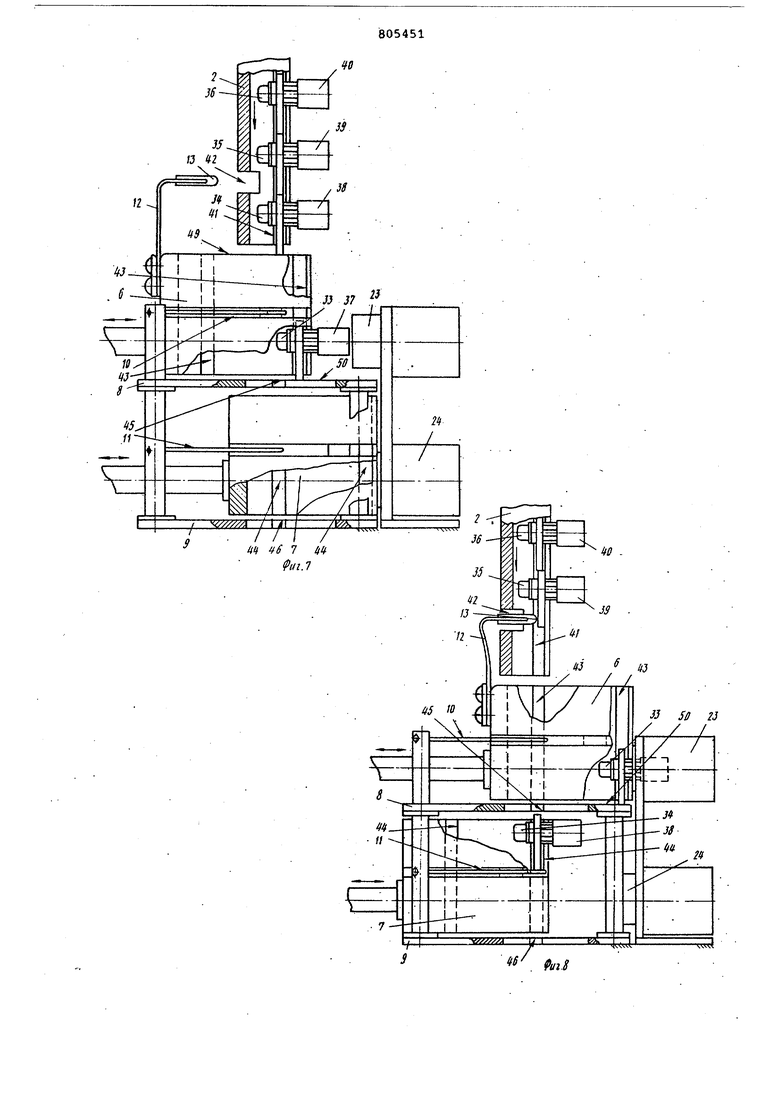
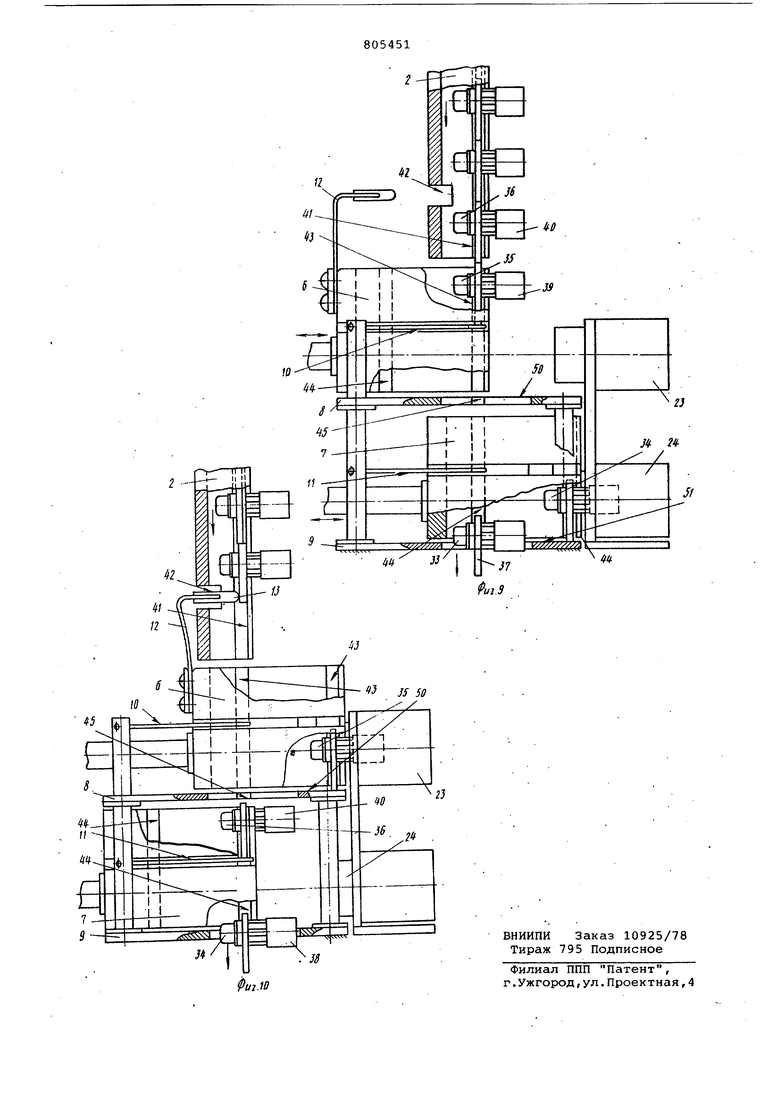
На фиг.1 изображена кинематическая схема устройства; на фиг.2-5 отдельные участки, разрезы; на фиг.6 рабочее положение устройства на позиции разгрузки первого прибора; на фиг.7 - промежуточное положение устройства при перемещении загрух енного прибора на позицию измерения; на фиг.8 - рабочее положений устройства на позициях измерения первого прибора и загрузки второго прибора; на фиг.9 - рабочее положение устройства на позициях, разгрузки первого прибора, измерения второго прибора и загрузки третьего прибора на фиг.10 рабочее положение устройства на позициях разгрузки второго прибора, измерения третьего прибора и загрузки четвертого прибора.
Устройство содержит загрузочный механизм, выполненный в виде вибробункера 1 с питателем 2, механизм последовательной подачи приборов включающий два подвижных штока 3, снабженных роликами 4 и шарикоподшипниковой опорой 5, две подвижные.
горизонтально-перемещающиеся верхнюю каретку б и нижнюю каретку 7, закрепленные на торцах подвижных штоков 3, две разделительные пластины 8 и 9, размещенные под каждой кареткой соответственно 6 и 7,.два отсекателя 10 и 11, пружинящий прижим 12 с демпфером 13, две возвратные пружины 14, механический привод, включающий электродвигатель 15, муфту 16, червяк 17 с червячным колесом 18, на общем валу 19 которого закреплены кулачки 20 и поводо 21 индукционных датчиков 22, две контактные колодки 23 и 24, размещеные на общем кронштейне 25, измеритель 26, блок 27 управления и раскладчик разбракованных приборов, включающий шаговый электродвигатель 28, с жестко закрепленным на его валу лотком 29 и тару 30. Разделительные пластины 8 и 9 закреплены на колонках 31 и 32. В питателе 2 загрузочного устройства загружены полупроводниковые приборы 33 - 36, уложенные в технологические спутники-носители 37 - 40. Прижим 12 выполнен Г-образной формы и жестко закреплен на верхней каретке 6. Питатель 2 выполнен вертикальным, П-образного сечения и снабжен одной парой пазов 41, форма и размеры которых соответствуют спутникамносителям 37-40 с загруженными в них приборами 33 - 36, а на нижнем конце вертикального питателя 2 выполнен вырез 42 под Г-образный прижим 12. Каждая каретка снабжена двумя парами вертикальных пазов: 43 в каретке 6 и 44 в каретке 7, форма и размеры которых соответствуют спутникам-носителям 37-40 с загруженными в них приборами 33 - 36. Расстояние а между пазами 43 каретки 6 и 44, каретки 7 равно шагу рабочего хода кареток 6 и 7. Каждая разделительная пластина снабжена одной парой пазов сооветственно 45 в пластине 8 и 46 в пластине 9, форма и размеры которых соответствуют спутникам-носителям 37 - 40 с загруженными в- них приборами 33 - 36. На боковой поверхности каждой каретки б и 7 выполнена сквозная прорезь 47, переходящая в продольный паз 48 для размещения отсекателей соответственно 10 и 11. Торец верхней каретки 6 Образует опорную поверхность 49, а верхние плоскости разделительных пластин 8 и 9 образуют опорные поверхности 50 и 51.
Устройство работает следующим образом. . .
От электродвигателя 15 вращение передается через муфту 16,.червяк 1 и .червячное колесо. 18 на -кулачки 20, которые, вращаясь, сообщают возвратно-поступательное двиисение -кареткам 6 и 7 с остановками на позициях загрузки-разгрузки и измерения. Возвратные пружины 14 обеспечивают постоянное прижатие штоков 3 через ролики 4 к кулачкам 20.
Измеряемые полупроводниковые приборы 33 - 36, загруженные в технологические спутники-носители 37 - 40 без них),поступают из вибробункера 1. загрузочного устройства в питатель 2.
При расположении каретки 6 в крайнем, например,левом положении (см. фи.6) , передние пазы43 совмещаются с пазами 41 питателя 2, а первый спутник 37 с загруженным в него прибором 33 поступает в верхнюю часть пазов 43 и удерживается там рабочим концом отсекателя 10, размещенным в боковой прорези 47 каретки б. Верхний торец спутника 37 выступает над опорной поверхностью 49 каретки € для исключения заклинивания последующего спутника с прибором в пазу каретки 6 .
При перемещении каретки 6 вправо (см.фиг.7) передняя пара пазов 43 смещается относительно пазов 41 питателя 2, пазов 45 разделительной пластины 8 и рабочего конца отсекателя 10. Рабочий конец отсекателя 10, скользя по поверхности продольного паза 48, выходит за пределы боковой сквозной прорези 47 и одного из пазов 43, и спутник 37 с прибором 33 перемещается под собственным весом до упора в опорную поверхность 50 разделительной пластины 8.
Последующий спутник 38 с загруженным в него прибором 34 освобождается от упора в верхний торец спутника 37 и нижним своим торцом скользит по опорной поверхности 49 каретки 6. При дальнейшем перемещении -каретки 6.(см.фиг. 8 спутник 37 скользит по опорной поверхности 50- и утапливается своей передней частью в контактную колодку 23, а каретка 6, нажимая на контактную колодку 23, обеспечивает коммутацию измеряемого прибора 33 с измерителем 26 на позиции измерения. В положении измерения обеспечивается остановка кареток 5 и 7, пазы 41 питателя 2 совмещаются с другими пазами 43 каретки 6 и передними пазами 44 каретки 7. Последующий спутник 38 с загруженным в него прибором 34 проходит по этим пазам 43 каретки б и пазам 45 разделительной пластины 8 и поступает в- пазы 44 каретки 7 до упора в рабочий конец отсекателя 11, утопленного в боковой сквозной .прорези 47. Рабочий конец Г-образного прижима 12 с демпфером 13 заходит в вырез 42 пцтателя 2 так, что последующий спутник 39 с загруженным в него прибором .35 прижимается к стенкам пазов питателя 2.
По окончании процесса MDMOIIGHIUI прибора 33 (см.фиг.9), каретка 6 перемещается влево, а каретка 7 перемещается вправо. При этом спутник 37 с загруженным в него прибором 33, прошедшим измерения, скользит нижним торцом по опорной поверхности 5.0 разделительной пластины 8. При совмещении пазов 43 каретки 6, пазов 45 разделительноГ пластины 8, пазов 44 каретки 7 и
o пазов 46 разделительной пластины 9 спутник 37 с измеренным прибором 33 поступает в лоток 29, перемещаемый шаговым электродвигателем 28 раскладчика разбракованных прибо5ров. Индукционные датчики 22 посредством поводка 21, закрепленного на общем валу 19 с кулачками 20, обеспечивают подачу сигналов начала и конца измерения на измеритель 26. После обработки информации,поступа0ющей с контактных колодок 23 и 24 измеритель 26 лодает соответствующий сигнал на блок управления 27, управляющий шаговым электродвигателем 28 раскладчика разбракован5ных приборов. Команда, поступившая с измерителя 26 через блок управления 27 на шаговый- электродвигатель 28, обеспечивает остановку лотка 29 у соответствующей тары 30, куда
0 попадает измеренный прибор 33, загруженный в спутник 37. Одновременно с выгрузкой измеренного прибора 33 происходит коммутация выводов прибора 34, загруженного в спутник
5 38, контактной колодкой 24 с измерителем 26, -а последующий прибор 35, загружненный в спутник 39, высвобожденный от защемления прижимом 12, поступает - в пазы 43 каретки 6.
0
По окончании измерения прибора 34 (см.фиг.10) каретка 7 перемещается влево, а каретка 6 перемещается вправо. При этом спутник 38 с загруженным в негр прибором 34, прошед- . шим измерение; скользит нижним тор5цом по опорной поверхности 51 разделительной пластины 9. При совмещении пазов 44 каретки 7 и пазов 46 разделительной пластины 9, спутник 38 с прибором 34 поступает в лоток 29,
0 откуда загружается в соответствующую тару 30 раскладчика разбракованных приборов. Прибор 35, загруженный в спутник 39, поступает во время разгрузки измеренного .прибора в кон5тактную колодку 23. Далее цикл работы повторяется.
Формула . изобретения
Устройство для контроля и разбраковки радиоэлементов, преимущественно полупроводниковых приборов и микросхем, содержащее размещенный на основании загрузочный механизм с .
питателем, механизм подачи радиоэлементов , выполненный в виде двух связанных с приводньом механизмом кареток с пазами для прохода радиоэлементов, контактные колодки, измеритель , блок управления и раскладчик разбракованных радиоэлементов, отлич.ающееся тем, что, с целью повышения производительности, оно снабжено двумя подпружиненными отсекателями, закрепленными на основании на уровне середины каждой каретки и двумя неподвижными разделительными пластинами, размещенныгли под каретками и подпружиненным прижимом, установленным на верхней каретке с возможностью взаимодействия
с радиоэлементами, находящимися в питателе, причем в каждой каретке выполнены прорези для прохода отсекателей и дополнительные пазы для прохода радиоэлементов, расположенные на расстоянии от основных пазов равном величине хода каретки, а в каждой разделительной пластине выполнены скрозные прорези,совпадающие с пазами кареток.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 560278, кл. Н 01 Ь 21/66, 1977.
2.Авторское свидетельство СССР № 565339, кл. Н 01 L 21/66, 1977 (прототип). 8идг . US Sff JO I J I J 9ui.S