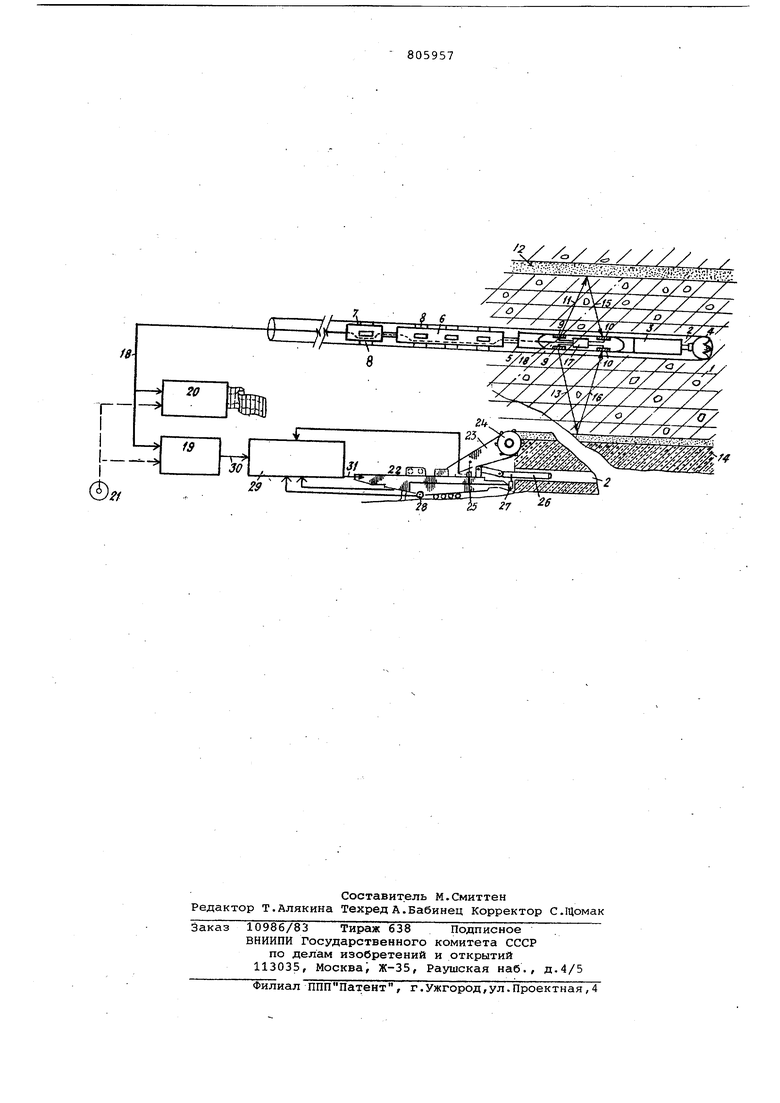
передовую скважину 2. Буровой станок состоит из привода 3, который соединен посредством вала с буровой коронкой 4, приборного блока 5, подающей 6 и перестановочной 7 частей с опорами 8. Приборный блок 5 содержит источники 9 радиоактивного излучения и детекторы 10 излучения. Источники 9 излучают f -кванты в направлении стрелки 11 к крбвле 12 пласта и в направлении стрелки 13 к почве 14 пласта. Рассеянное излучение в направлении стрелок 15 и 16 соответственно от кровли 12 и почвы 14 пласта фиксируется детекторами 10 Детекторы 10 через усилитель 17 по линии 18 связи соединены с программным блоком 19 регистратором 2,0. к программному -блоку 19 и, регистратору 20 подключен также датчик -21 пути, механически связанный с подающей частью бурового станка.
Горный комбайн состоит из рамы 22 на которой закреплена стрела 23 с исполнительным органом 24. Положение стрелы изменяется при помощи гидродомкрата и измеряется датчиком 25 положения. На раме 22 комбайна закреплен зонд 26, помещенный в ранее пробуренную передовую скважину 2. Положение зонда относительно рамы 22 комбайна определяется датчиком
27положения. Ходовая часть комбайна механически соединена с датчиком
28пути комбайна. Датчики 25,27 и
28 подключены к блоку 29 управления к которому также подключен выход 30 программного блока 19. Выход 31 блока управления подключен к гидродомкрату стрелы 23 исполнительного органа 24.
Устройство работает следующим образом.
В лроцессе бурения передовой скважины 2 через заданные промежутки пути, определяемые датчиком 21 пути определяются расстояния от оси скважины как до почвы 14, так и до кровли 12 пласта 1 полезного ископаемого Измеренные расстояния (сигналы усилителя 17) поступают в программный блок 19, где запоминаются в качестве программы, и на регистратор 20. В процессе выемки полезного ископаемого датчиками 25 и 27 определяется
положение как стрелы 23 исполнительного органа 24, так и зонда 26 относительно рамы 22 горного комбайна.
В соответствии с сигналами датчиков 25 и 27 в блоке 29 управления через заданные интервалы пути, определяемые датчиком 28 пути комбайна производится корректировка программы работы исполнительного органа 24 горного комбайна как у почвы, так и у кровли пласта 1.
Формула изобретения
Способ автоматического управлени;
S горным комбайном в профиле пласта, основанный на управлении положения его, исполнительного органа по заранее заданной программе и включающий измерение расстояний до одной из
Q границ пласта, например почвы листа, контроль пути, проходимого горным комбайном, и корректировку заданной программы в соответствии с.положением комбайна и его исполнительного органа в функции пройденного комбайном пути, отличающийся тем, что, с целью повышения точности управления, предварительно в пласте полезного ископаемого бурят передовую скважину, в процессе бурения
0 через заданные промежутки пути определяют расстояния от оси скважины как до почвы, так и до кровли пласта, например, при помощи радиоизотопных датчиков, эти расстояния запоминают
5 как программу работы,исполнительного органа горного комбайна у почвы и кровли пласта, а после бурения скважины в процессе выемки полезного ископаемого при помощи помещенного в
0 скважину зонда контролируют положение корпуса горного комбайна относительно оси скважины и положение исполнительного органа Относительно корпуса горного комбайна.
Источники информации,
принятые во внимание при экспертизе
1.Патент Великобритании № 1063468, кл. Е 21 С 35/08, опублик. 1967.
2..Авторское свидетельство СССР
0 № 310044, кл. Е 21 с 27/00, 1969 (прототип). 2 / /
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОДЗЕМНОЙ РАЗРАБОТКИ МОЩНЫХ И КРУТОПАДАЮЩИХ ЗАЛЕЖЕЙ КАЛИЙНЫХ РУД | 2013 |
|
RU2540736C1 |
| СПОСОБ РАЗРАБОТКИ МОЩНЫХ УГОЛЬНЫХ ПЛАСТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2391510C1 |
| Комбайн для селективной разработки пластов полезных ископаемых | 1988 |
|
SU1613601A1 |
| СПОСОБ РАЗРАБОТКИ МОЩНЫХ ВЫБРОСООПАСНЫХ СОЛЯНЫХ ПЛАСТОВ СО СЛОЖНОЙ ГИПСОМЕТРИЕЙ ЗАЛЕГАНИЯ | 1991 |
|
RU2015329C1 |
| Проходческий комбайн | 1981 |
|
SU960432A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ КРОВЛЕЙ И ПОДГОТОВКИ К ВЫЕМКЕ МОЩНЫХ ПЛАСТОВ ПОЛЕЗНОГО ИСКОПАЕМОГО С ВЫПУСКОМ ЕГО ИЗ ПОДКРОВЕЛЬНОЙ ТОЛЩИ | 2002 |
|
RU2253017C2 |
| Способ проходки горной выработки и устройство для его осуществления | 2018 |
|
RU2689455C1 |
| КОМБАЙН ДЛЯ СЕЛЕКТИВНОЙ ВЫЕМКИ ПОЛЕЗНОГО ИСКОПАЕМОГОimЙС^-ОСЮЗНА: ;'G-^t":;'";Ei | 1973 |
|
SU362137A1 |
| СПОСОБ ПРОВЕДЕНИЯ ПОДГОТОВИТЕЛЬНОЙ ГОРНОЙ ВЫРАБОТКИ И МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2739010C1 |
| СПОСОБ РАЗРАБОТКИ КРУТОГО УГОЛЬНОГО ПЛАСТА | 2001 |
|
RU2208161C1 |