(54) СТЕЛЛАЖ МЕХАНЙЗИЮВАННЫЙ ЭЛЕВАТОРНОГО ТИПА
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕВАТОРНЫЙ СТЕЛЛАЖ | 1991 |
|
RU2016829C1 |
| Элеваторный стеллаж | 1987 |
|
SU1519980A1 |
| Механизированный стеллаж | 1982 |
|
SU1044558A1 |
| Полочный элеваторный стеллаж | 1979 |
|
SU831668A2 |
| Устройство для загрузки и разгрузки стеллажей | 1983 |
|
SU1134484A1 |
| Элеваторный стеллаж | 1985 |
|
SU1326505A1 |
| Элеваторный стеллаж | 1985 |
|
SU1306854A1 |
| Элеваторный стеллаж | 1979 |
|
SU818978A1 |
| Элеваторный стеллаж | 1990 |
|
SU1789443A1 |
| Полочный элеваторный стеллаж | 1980 |
|
SU929507A2 |
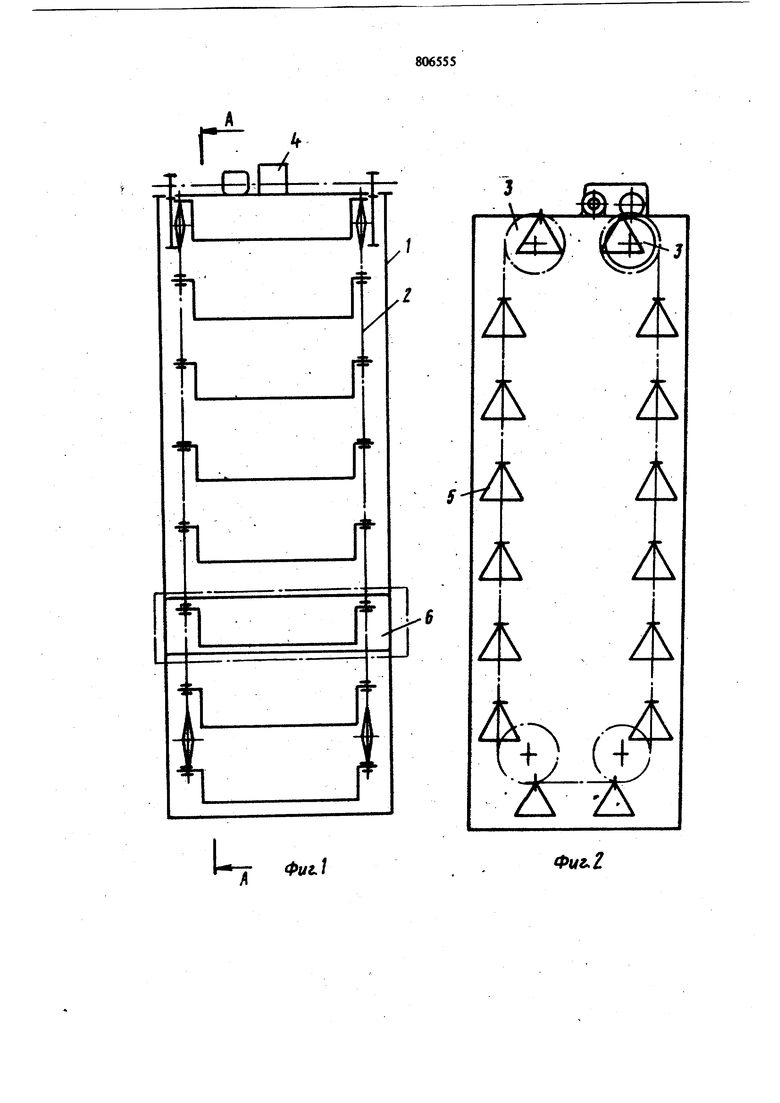
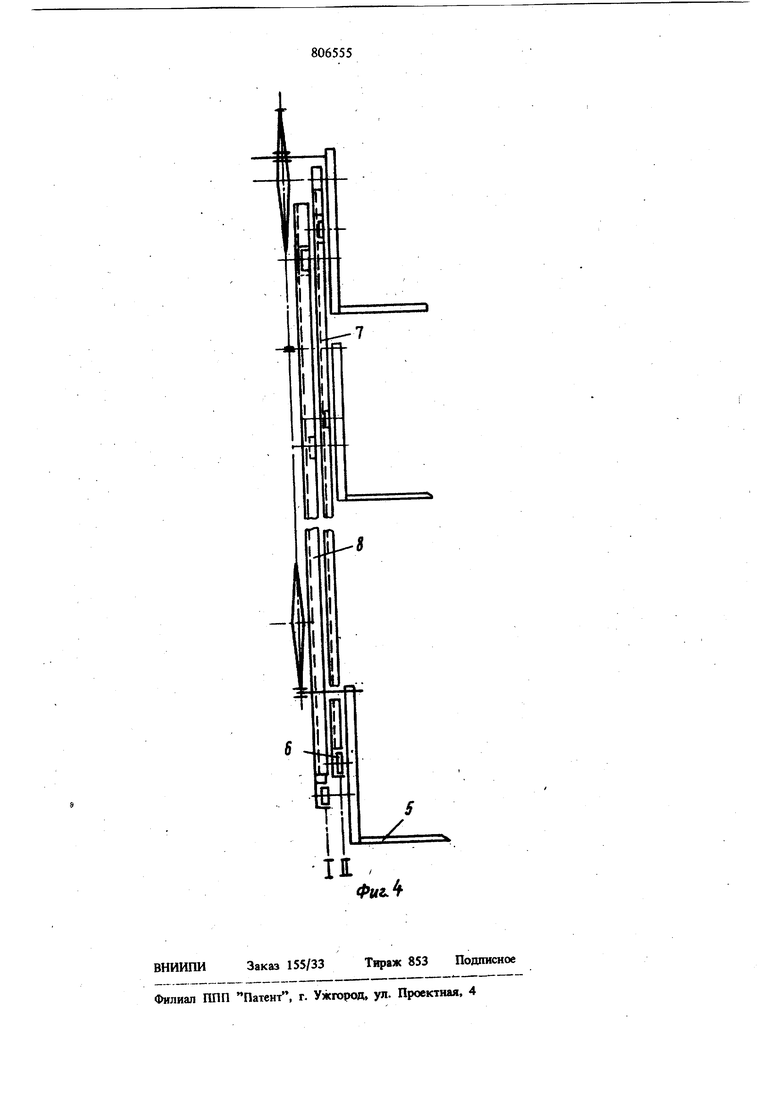
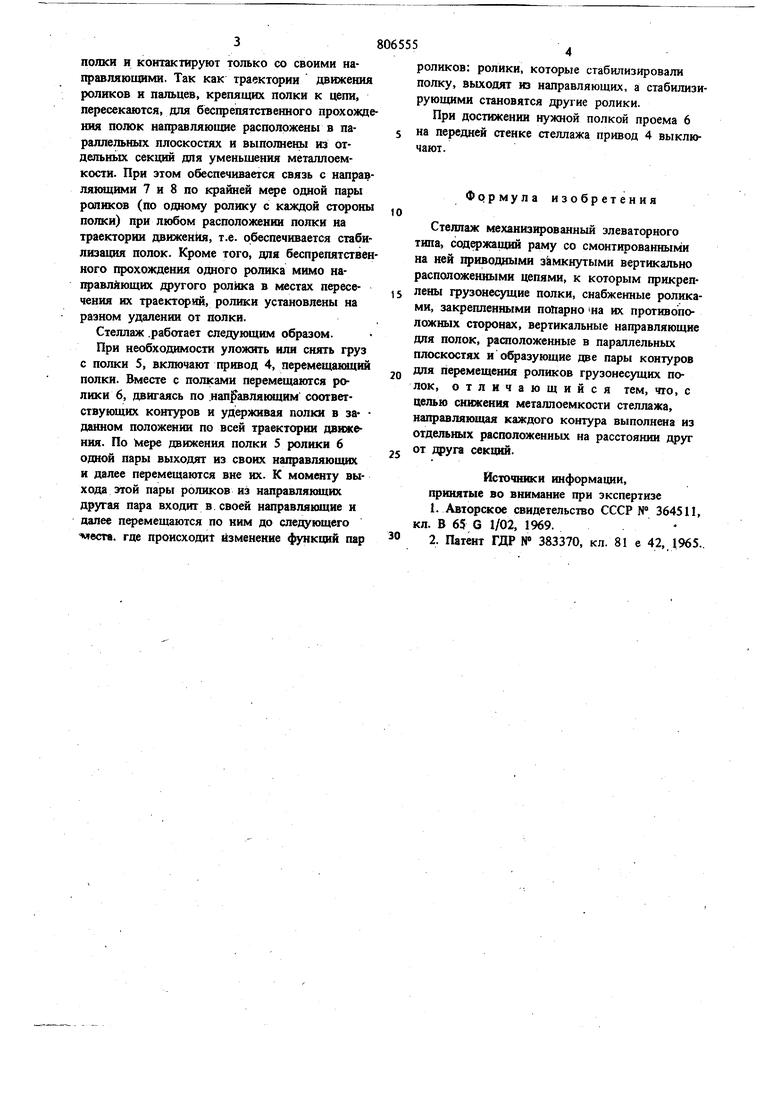
Изобретение относится к об(фуд жаншо складов, в частности к механю11рова}|ным стеллажам элеваторного типа. Известен стеллаж механизированный элевато ного типа, содержащий раму со смсм{т1фованными на ней приводными |амкнутыми в шкальио расположенными це{пямн, к которым прюсреплены полки посредством систем рычагов 1).. Однако из-за наличия систем рычагов известная конструкция сложна. Известен стеллаж механизированный злеваторного пша, содержащей раму со смонтнровш иымн на ней приводными замкнугыми вертикально расположенными цепями, к которым прикреплены грузонесущие полки, снабжеш1ые роликами, закрепленными попарно на их 1фотивопопожных сторонах, вертикальные направляющие для полок, расположенные в парал лельных плоскостях и образующие две пары контуров для перемещения роликов грузонесу щих полок 2. Недостатком -является большая металлоемкость известного стеллажа из-за, того, что направляющие вьшолнены сплощнымн по всему контуру. Цель изо етензта - снижение металлоемкости. Поставленная цель достигается тем, что направляющая каждого контура выполнена из отдельш 1х, расположенных на растоянии друг от друга секций. На фиг. 1 показш стеллаж, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг. 3 расположедние секций направляющих; на фиг. 4 - расположение контуров направляющих. Стеллаж содержит металлоконструкцию 1, внутри которой установлены две замкнутые вертикально расположенные цепи 2, огибающие звездочки 3. Две звездочки являются приводными и связаны с 1фиводом 4. На цепях с помощыо пальцев щарнирно закреплены полки 5. На передней стороне сделан проем 6 для загрузки и разгрузки полок 5. Полки имеют по две -пары роликов 6, контактирующих с направляющими 7 и 8. На фиг. 3 показано по одному ролику каждой пары, которые находятся с одной стороны
полки и контактируют только со своими направляющими. Так как траектории движения роликов и пальцев, крепящих полки к цепи, пересекаются, для беспрепятственного прохождения полок направляющие расположены в параллельных плоскостях и выполнень из отдельных секций для уменьшения металлоемкости. При этом обеспечивается связь с направляющими 7 и 8 по крайней мере одной пары роликов (по одному ролику с каждой стороны полки) при любом расположении полки иа траектории движения, т.е. обеспечивается стабилизация полок. Кроме того, для беспрепятственного прохождения одного ролика мимо иащ)авлйющих рругого ролика в местах пересечения их траектсфий, ролики установлены на разном удалении от полки.
Стеллаж .работает следующим образом.
При необходимости уложить или снять груз с полки 5, включают привод 4, перемещанйций полки. Вместе с полками перемещаются ролики 6, двигаясь по .нап авляняцим соответствующих контуров и удерживая полки в за- данном положении по всей траектории движения. По Мере движения полки 5 ролики 6 одной пары выходят из своих направляющих и далее перемещаются вне их. К моменту выхода этой пары роликов из направляющих другая пара входит в своей направляющие и далее перемещаются по ним до следующего Места, где происходит изменение функций пар
роликов: ролики, которые стабилизировали полку, выходят ю направляющих, а стабилизирующими становятся другие ролики.
При достижении нужной полкой проема 6 на передней стенке стеллажа привод 4 выключают.
Формула изобретения
Стеллаж механизированный элеваторного типа, содержащий раму со смонтироваиными на ней приводными вертикально расположенными цепями, к которым прикреплены грузоиесущие полки, снабженные роликами, закреплеиными попарно на их противоположиых сторонах, вертикальные направляющие для полок, расположенные в параллельных плоскостях и образующие две пары контуров для перемещения роликов груэонесущих полок, отличающийся тем, что, с целью снижеиия металлоемкости стеллажа, направляющая каждого контура выполнена из отдельных расположенных на расстоянии друг от друга секций.
Источники информации, принятые во внимание при экспертизе
Г
u
Фиг.1
Фи&.
АХ.
V
Фиг.З
