Изобретение относится к промышленному транспорту, а именно к оборудованию транспортно-складских систем, и может быть использовано в различных отраслях промышленности для перемешения и складирования разнообразных грузов, преимуш,ественно в таре, при обслуживании стеллажей, накопителей и т.д.
Известно устройство для загрузки и разгрузки стеллажей, преимуш,ественно элеваторных, содержаш,ее приводную подвижную тележку, установленную на рельсовом пути, размеш,енном вдоль стеллажей, загрузочный механизм, закрепленный на подвижной тележке и выполненный в виде рамы со смонтированными на ней параллельными цепными передачами, соединенными с приводом, и грузозахватный орган, связанный с цепными передачами 1.
Однако в известном устройстве необходимо позиционировать приводную тележку в месте загрузки - разгрузки с высокой точностью, обеспечивающей вход загрузочного механизма в элеваторный стеллаж и захват тары. Для обеспечения точной установки применяется система путевых датчиков и конечных выключателей, взаимодействуюш,их с системой управления, а скорость перемеш,ения устройства разбивается при этом на несколько диапазонов. Чем выше скорость устройства, тем больше времени тратится на позиционирование, что сказывается на производительности устройства. Кроме того, известное устройство способно манипулировать только со специальной тарой.
Цель изобретения - повышение производительности устройства.
Для достижения цели в устройстве для загрузки и разгрузки стеллажей, преимушественно элеваторных, содержащем приводную подвижную тележку, установленную на рельсовом пути, размещенном вдоль стеллажей, загрузочный механизм, закрепленный на подвижной тележке и выполненный в виде рамы со смонтированными на ней параллельными цепными передачами, соединенными с приводом, и грузозахватный орган, связанный с цепными передачами, контуры цепных передач содержат расположенные одна над другой параллельные ветви, грузозахватный орган включает в себя стойки, каждая из которых соединена своими концами соответственно с нижними и верхними ветвями цепных передач, ролики, смонтированные в местах соединения стоек с цепными передачами, вилы, прикрепленные к стойкам посредством рычагов, образующих с последними шарнирный параллелограмм, при этом устройство снабжено ограничителями соответственно вертикального и горизонтального перемещения вил и размещенными в верхней и нижней частях рамы горизонтальными направляющими для роликов стоек.
Кроме того, загрузочный механизм может быть закреплен на подвижной тележке шарнирно посредством штанг, а на концах вил смонтированы ролики.
Контуры цепных передач выполнены С-образньши.
Ограничитель вертикального перемещения вил выполнен в виде Г-образного упора, закрепленного на стойке с возможностью взаимодействия с пальцем, смонтированным на вилах.
Ограничитель горизонтального перемещения вил выполнен в виде гибкого элемента, один конец которого закреплен на вилах, а другой - на раме.
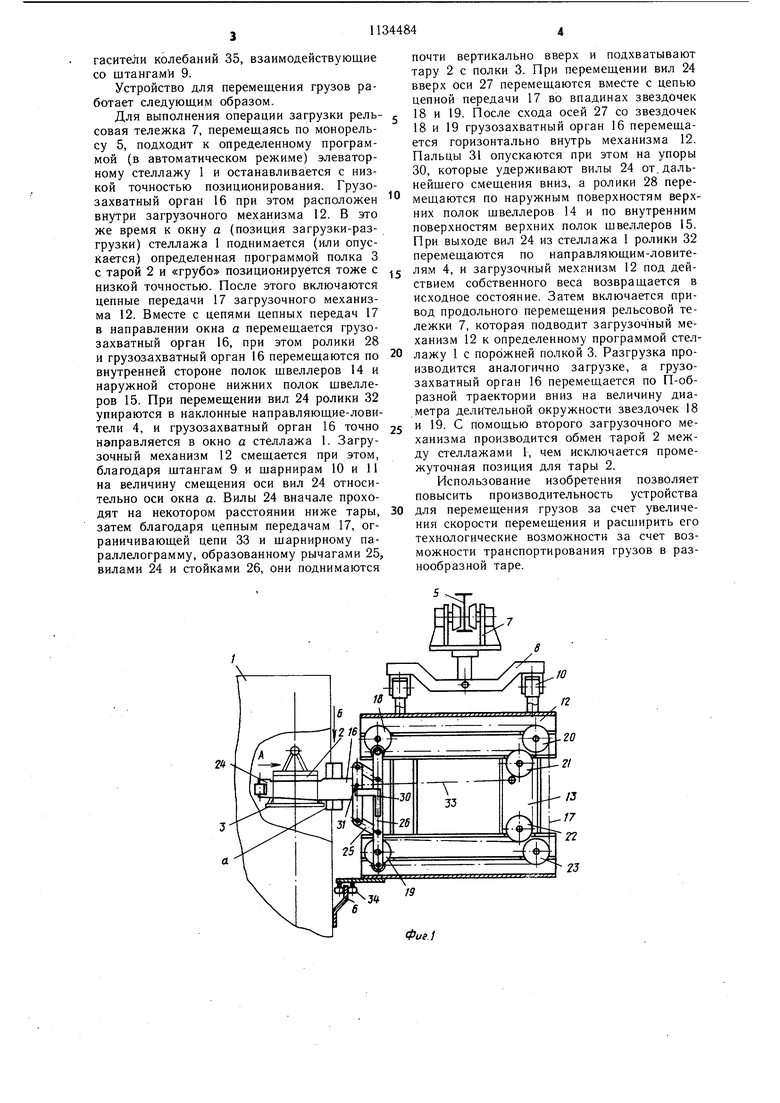
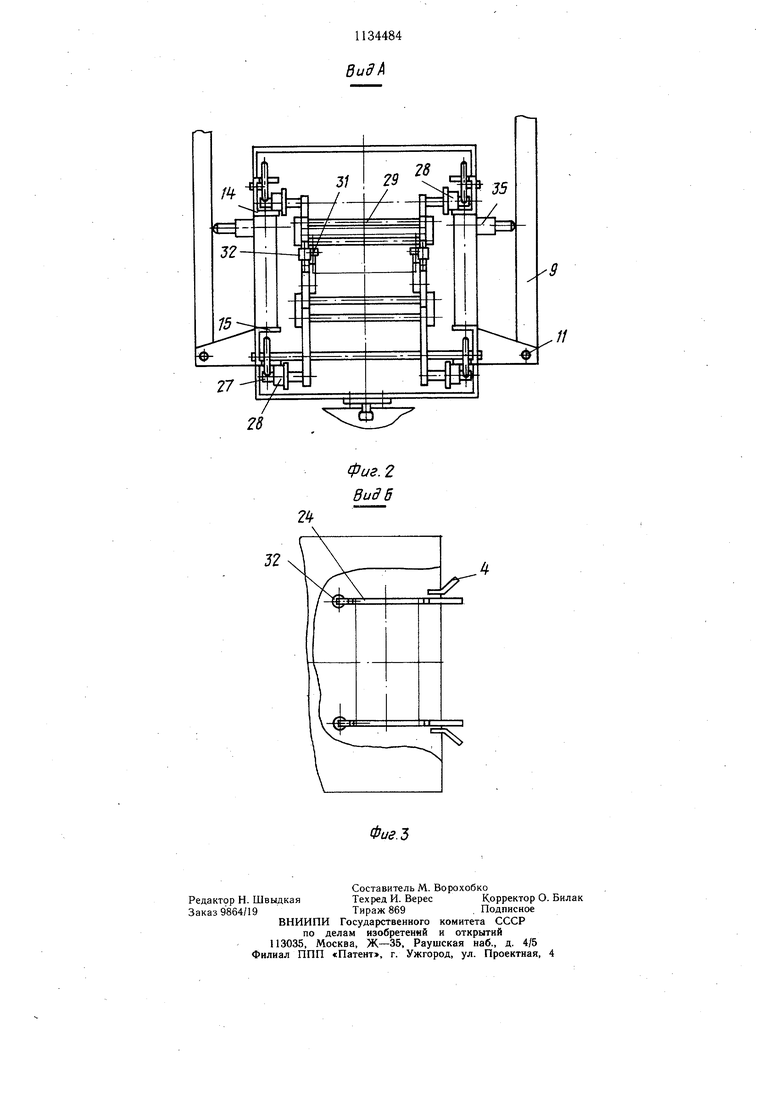
На фиг. 1 изображено устройство, общий вид, разрез по оси симметрии загрузочного механизма; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1.
Для большей наглядности показан элеваторный стеллаж 1 с окнами для загрузки - разгрузки а и съемной тарой 2, расположенной на полке 3. Устройство содержит направляющие-ловители 4, расположенные на входе в окна а стеллажей 1. Вдоль ряда стеллажей 1 в верхней зоне закреплен
5 монорельс 5 и дополнительная направляющая 6. На монорельсе 5 размещена приводная тележка 7 (привод продольного перемещения не показан). К траверсам 8 приводной тележки 7 с помощью щтанг 9 и шарниров 10 и 11 подвешены два загрузочных механизма 12, расположенных один за другим вдоль пути (показан один). Загрузочный механизм 12 состоит из рамы 13, боковые швел леры 14 и 15 которой служат направляющими для грузозахватного органа 16. На механизме 12 смонтированы две С-образные цепные передачи 17, звездочки 18-23 которых закреплены на раме 13 (общий привод цепных передач 17 не показан).
Грузозахватный орган 16 состоит из вил 0 24, которые щарнирно прикреплены с помощью рычагов 25 к вертикальным стойкам 26 и образуют шарнирный параллелограмм. Концы стоек 26 соединены с помощью осей 27 с цепной передачей 17. На осях 27 посажены ролики 28, взаимодействующие своей наружной поверхностью с полками швеллеров 14 и 15. Стяжки 29 соединяют рычаги 25. На стойках 26 закреплены Г-образные упоры 30, которые ограничивают перемещение вил 24 вниз относительно стоек 260 Вилы 24 опираются с помощью пальцев 31 на упоры 30. На конце вил 24 закреплены направляющие ролики 32, взаимодействующие с направляющими-ловителями 4. Палец 31 соединен гибким органом, например, цепью 33 (ограничитель горизонтального 5 хода грузозахватного органа) с рамой 13. Снизу к раме 13 прикреплены дополнительные опорные катки 34, взаимодействующие с направляющей 6. На раме 13 закреплены
гасители колебаний 35, взаимодействующие со штангами 9.
Устройство для перемещения грузов работает следующим образом.
Для выполнения операции загрузки рельсовая тележка 7, перемещаясь по монорельсу 5, подходит к определенному программой (в автоматическом режиме) элеваторному стеллажу 1 и останавливается с низкой точностью позиционирования. Грузозахватный орган 16 при этом расположен внутри загрузочного механизма 12. В это же время к окну а (позиция загрузки-разгрузки) стеллажа 1 поднимается (или опускается) определенная программой полка 3 с тарой 2 и «грубо позиционируется тоже с низкой точностью. После этого включаются цепные передачи 17 загрузочного механизма 12. Вместе с цепями цепных передач 17 в направлении окна а перемещается грузозахватный орган 16, при этом ролики 28 и грузозахватный орган 16 перемещаются по внутренней стороне полок щвеллеров 14 и наружной стороне нижних полок щвеллеров 15. При перемещении вил 24 ролики 32 упираются в наклонные направляющие-ловители 4, и грузозахватный орган 16 точно направляется в окно а стеллажа 1. Загрузочный механизм 12 смещается при этом, благодаря щтангам 9 и щарнирам 10 и 11 на величину смещения оси вил 24 относительно оси окна а. Вилы 24 вначале проходят на некотором расстоянии ниже тары, затем благодаря цепным передачам 17, ограничивающей цепи 33 и щарнирному параллелограмму, образованному рычагами 25, вилами 24 и стойками 26, они поднимаются
2 почти вертикально вверх и подхватывают тару 2 с полки 3. При перемещении вил 24 вверх оси 27 перемещаются вместе с цепью цепной передачи 17 во впадинах звездочек 18 и 19. После схода осей 27 со звездочек 18 и 19 грузозахватный орган 16 перемещается горизонтально внутрь механизма 12. Пальцы 31 опускаются при этом на упоры 30, которые удерживают вилы 24 от, дальнейшего смещения вниз, а ролики 28 перемещаются по наружным поверхностям верхних полок щвеллеров 14 и по внутренним поверхностям верхних полок швеллеров 15. При выходе вил 24 из стеллажа 1 ролики 32 перемещаются по направляющим-ловителям 4, и загрузочный механизм 12 под действием собственного веса возвращается в исходное состояние. Затем включается привод продольного перемещения рельсовой тележки 7, которая подводит загрузочный механизм 12 к определенному программой стеллажу 1 с порожней полкой 3. Разгрузка производится аналогично загрузке, а грузозахватный орган 16 перемещается по П-образной траектории вниз на величину диаметра делительной окружности звездочек 18 и 19. С помощью второго загрузочного механизма производится обмен тарой 2 между стеллажами 1, чем исключается промежуточная позиция для тары 2.
Использование изобретения позволяет повысить производительность устройства для перемещения грузов за счет увеличения скорости перемещения и расширить его технологические возможности за счет возможности транспортирования грузов в разнообразной таре.
Фиг./
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки и разгрузки стеллажей | 1986 |
|
SU1399226A1 |
| Кран-штабелер для загрузки иРАзгРузКи КОНТЕйНЕРОВ | 1978 |
|
SU819016A1 |
| Механизм ориентации устройства для загрузки и разгрузки стеллажа | 1985 |
|
SU1324959A1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Поточная линия для изготовления деталей типа тел вращения | 1980 |
|
SU1016210A1 |
| Элеваторный стеллаж | 1985 |
|
SU1306854A1 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ОБСЛУЖИВАНИЯ СТЕЛЛАЖЕЙ | 1990 |
|
RU2017676C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ПРЕИМУЩЕСТВЕННО ТРАНСПОРТНО-ПУСКОВЫХ КОНТЕЙНЕРОВ НА ПУСКОВУЮ УСТАНОВКУ КОРАБЛЯ | 2012 |
|
RU2489307C1 |
| Устройство для загрузки и разгрузки многоярусных стеллажей | 1979 |
|
SU893733A1 |
| Комплексно-механизированная линия погрузки пищевых продуктов | 1986 |
|
SU1416396A1 |
1. УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ И РАЗГРУЗКИ СТЕЛЛАЖЕЙ, преимущественно элеваторных, содержащее приводную подвижную тележку, установленную на рельсовом пути, размещенном вдоль стеллажей, загрузочный механизм, закрепленный на подвижной тележке и выполненный в виде рамы со смонтированными на ней параллельными цепными передачами, соединенными с приводом, и грузозахватный орган, связанный с цепнвши передачами, отличающееся тем, что, с целью повышения производительности, контуры цепных передач содержат расположенные одна над другой параллельные ветви, грузозахватный орган включает в себя стойки, каждая из которых соединена своими концами соответственно с нижними и верхними ветвями цепных передач, ролики, смонтированные в местах соединения стоек с цепными передачами, вилы, прикрепленные к стойкам посредством рычагов, образующих с последними щарнирный параллелограмм, при этом устройство снабжено ограничителями соответственно вертикального и горизонтального перемещения вил и размещенными в верхней и нижней частях рамы, горизонтальными направляющими для роликов стоек. 2.Устройство по п. 1, отличающееся тем, что загрузочный механизм закреплен на подвижной тележке щарнирно посредством штанг, а на концах вил смонтированы ролики. 3.Устройство по п. 1, отличающееся тем, & что контуры цепных передач выполнены С-образными. 4.Устройство по п. 1, отличающееся тем, что ограничитель вертикального перемещения вил выполнен в виде Г-образного упора, закрепленного на стойке с возможностью взаимодействия с пальцем, смонтированным на вилах. 5.Устройство по п. 1, отличающееся тем, что ограничитель горизонтального перемеОО щения вил выполнен в виде гибкого 4 00 4 .мента, один конец которого закреплен на вилах, а другой - на раме.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Смехов.А | |||
| А | |||
| Автоматизированные склады | |||
| М., «Машиностроение, 1979, с | |||
| Топливник с глухим подом | 1918 |
|
SU141A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
