4 4 СП
сд
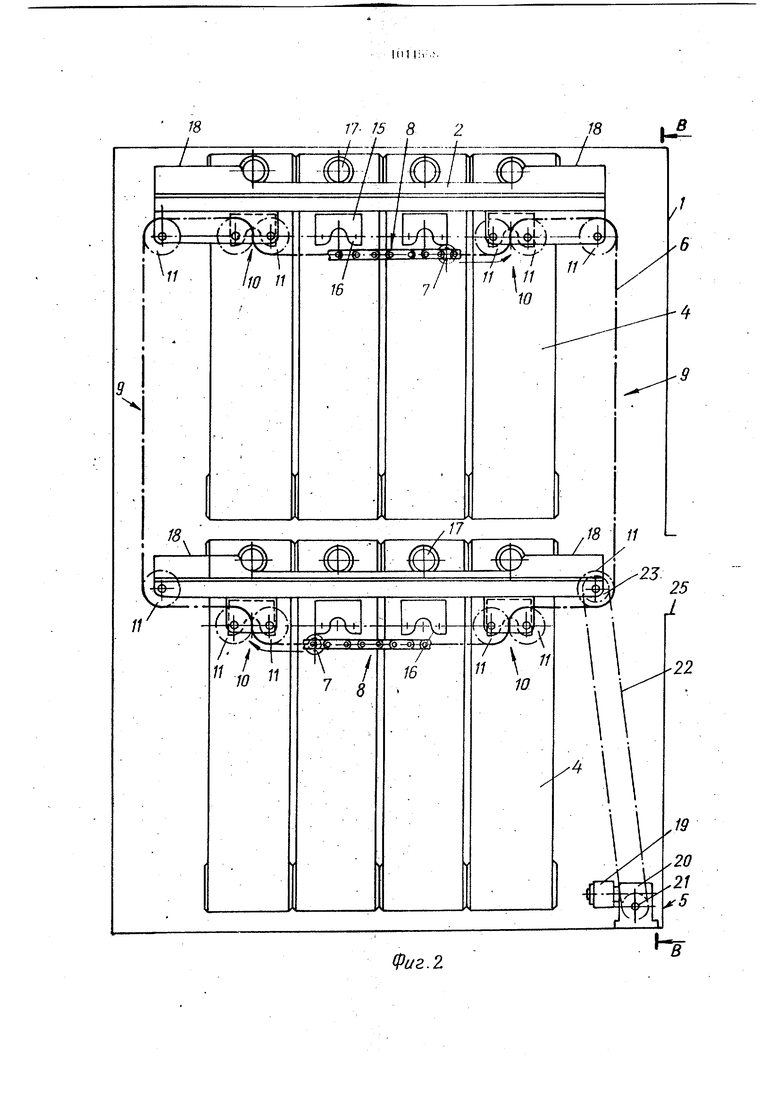
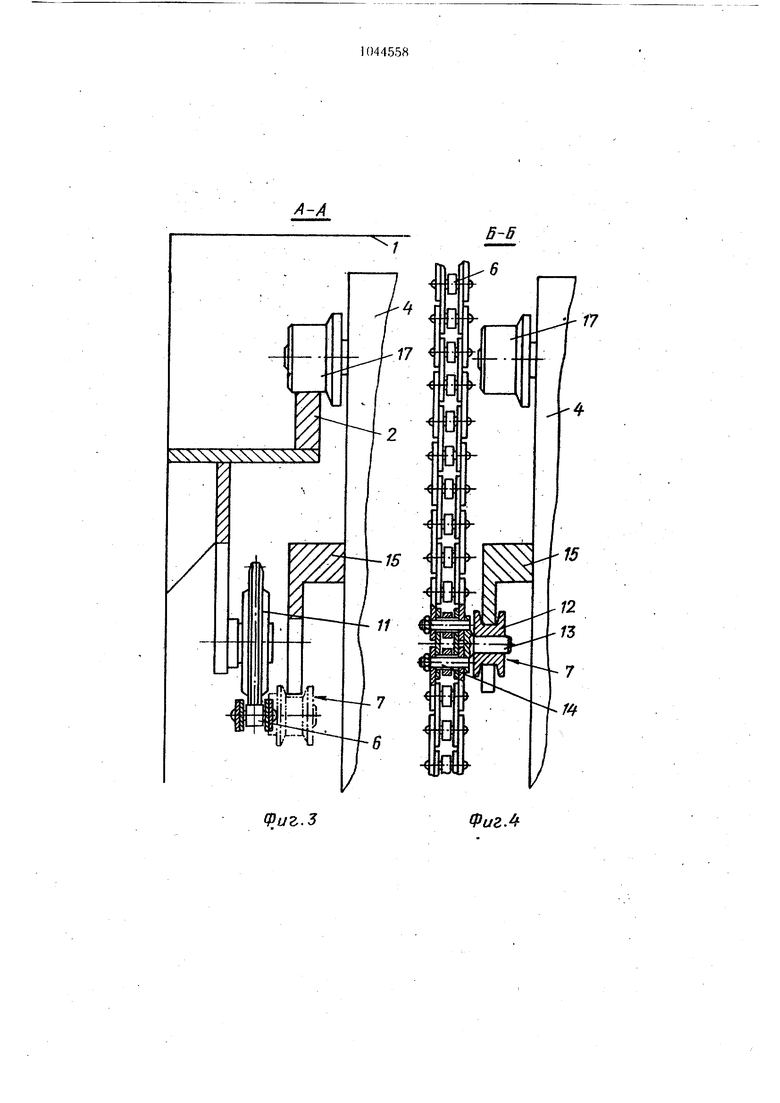
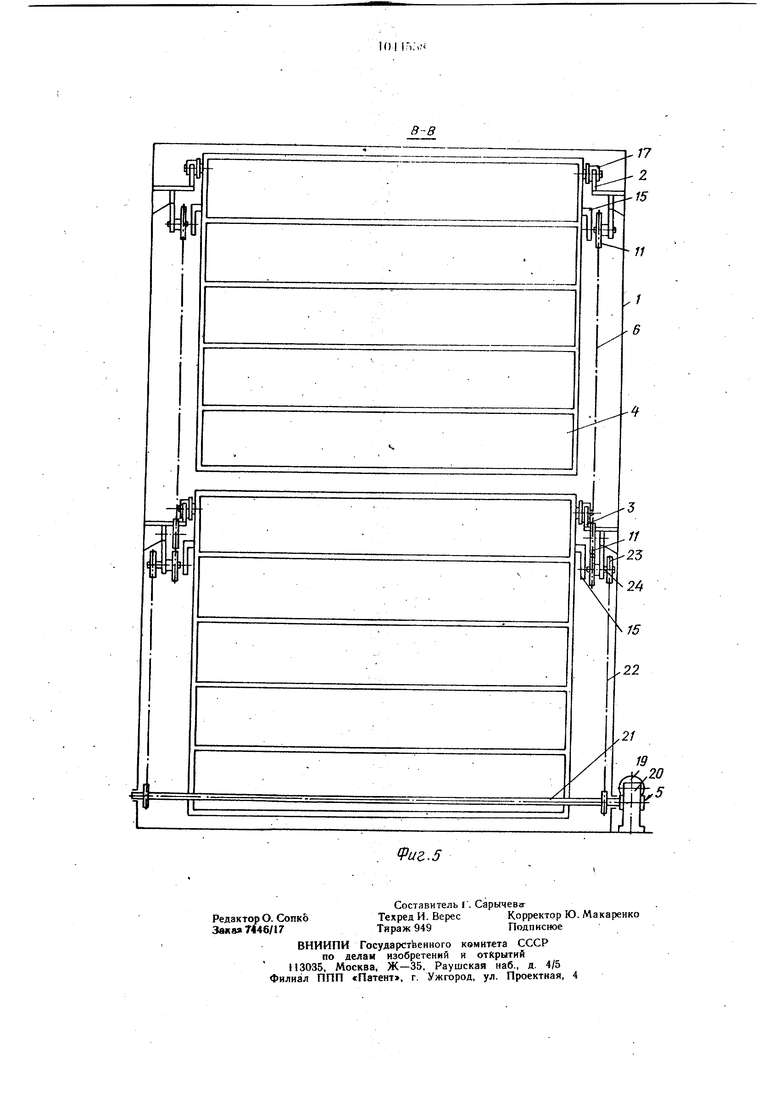
00 И:н)б)стсиио относится к хранению грузон, в частности, к мехзнизирояанным стелтажам, полки которых пе1)емеп1аются по замкнутому контуру н вертикальной плоскости и может быть использовано в )азличных отраслях нромьиилениостп прн х)анении нзлс.лий на полках. Известен мехапизиропанный стеллаж, солержапшй подвижные в вертикальной плоскости полки, прмкрепленпые к замкнутым цепным органам 1). Однако этот стеллаж имеет низкий коэффициент использования объема, обусловленный расположением нолок па тяговых цепях с больн1ими промежутками, позволяющими обход звездочек. Кроме того, стеллаж имеет сложную конструкцию в связи с .введением допо.тнительных элементов, иск.1ючающих раскачивание полок. Наиболее близким к предлагаемому по технической сущности является механизировап1и и стеллаж, содержа1дий корпус, раз.меиюнные в корпусе горизонтальные направляюии1е для грузонесуших полок и механизм, для передачи полок с одного яруса на другой, включающий в себя отклоняющие звездочки, огибающие их цепнце контуры с образование.м горизонтальных и вертикальных участков и прикрепленные к цепям коктуров, и взаимодействующие с торцовыми сторонами nfrtJOK .захваты 2. Недостатком стеллажа является, то, что он имеет сложную конструкцию за счет использования в устройстве передачи полок с яруса на ярус нескольких цепных контуров, 11риводимь х в действие несколькими приводными механизмами и в связи с этим, немадежную конструкцию, поэтому .неудобен в эксплуатации. Цель изобретения - упрощение конструкции, повыщенпе надежности и удобства эксплуатации. Поставленная цель достигается тем, что в ме.ханизиропалном стеллаже, содержащем корпус, размещенные в корпусе горизонтальные направляющие для грузонесущих полок И механизм для передачи полок с одного яруса на другой, включающий в себя отклоняющие звездочки, огибающие их цепные контуры с образованием горизонтальных и вертикальных участков и прикрепленные к цепям контуров и взаимодействующие с торцовыми сторонами полок захваты, цепные контуры с каждой торцовой стороны полки образованы единой замкнутой цепью и имеют горизонтальные участки на всю длину направляющих, а одни из отклоняющих звездочек попарно установлены с каждой боковой стороны направляющих в зоне расположения крайних П.ОЛОК и охвачены цепью с возможностью смещения центральной чатсти каждого горизонтального участка контура относительно его концов. На фиг. 1 изображен механизированный стеллаж в момент установки полок на на 1|1апляющие. общий вил; на фиг. 2 механизированный стеллаж в момент сьема полок с направляющих, общий вид: на фиг. 3 ри.рез А-А на фиг. 1; на фи1. 4 - ра.чрез Б-Б на фиг. 1; на фиг. 5 - разрез В-В на фпг. 2. Механизиро;5анный стеллаж содержит корпус I, вер.хние 2 и нижние 3 1оризонтальные направляющие. На направляющих 2 и 3 подвижно установлены грузовые несущие Е1ОЛКИ 4 и соединенный с приводом 5.механизм для передачи полок по вертикали с одного яруса на другой и перемещения по ним включающий в себя лежащие в вертикальных плоскостях замкнутые тяговые цепи 6, образующие цепные контуры с захватами 7 для полок. Тяговые цепи 6 имеют горизонтальные участки 8, проходящие вдоль направляющих по всей их длине, и вертикальные участки 9, соединяющие горизонтальные участки между собой с противоположных концов направляющих 2 и 3. Горизонтальные участки 8 тяговых цепей 6 в зоне крайних полок выполнены с перегибами 10, образованными отклоняющими авездочками 11 и предназначенными для ввода захватов 7 в зацепление с полками 4 и вывода их из зацепления с ними. Часть отклоняющих звездочек II попарно установлены с каждой боковой стороны направляющих в зоне расположения крайних полок и охвачены цепью 6 с возможностью смещения центральной части каждого горизонтального участка контура относительно его концов. . . Захваты 7 образованы цилиндрическими роликами 12, прикрепленными к тяговым цепям 6 с помощью осей 13 и щпилек 14. Полки 4 оснащены расположенными с противо- положных сторон гнездами 15 для взаимодействия с цилиндрическими роликами 12. Гнезда 15 выполнены из листа и имею: рабочий контур 16, образованный радиусом отклоняющих звездочек II и диаметром роликов 12. На полках 4, также с противоположных сторон, закреплены катки 17 для перемещения по горизонтальным направляющим 2 и 3. Внутри полки 4 имеются опорные элементы 18 для-размещения груза.. Горизонтальные направляющие 2 и 3 на своих концах имеют ограничители 18, предназначенные для фиксации люлек 4 в крайних положениях. Привод 5 образован электродвигателем 19, редуктором 20, приводным валом 21 и цепными передачами 22. Звездочки 23 цепных передач 22 соединены с крайними нижними направляющими звездочками 1) общими валиками 24. Kopfiyc 1 имеет окно 25 для погрузочноазгрузочных операций. Механизированный стеллаж работает ледующим образом. Исходное положение принято в момент шремещения 1голок 4 на вертикальных участках 9, а одна из поло находится у погрузочио,-разгрузочного окна 25.
Включается привод 5 и тяговые цепи 6 начинают перемешаться (по часовой стрелке) опуская и поднимая полки 4, иаходяшие.ся на противоположных сторона стеллажа.
Захваты 7 (опускающие полку 4 с правой стороны, фиг. 1), переходя с вертикальной траектории движения на горизонталь-. ную, последовательно обходят крайние нижние направляющие, звездочки II и перегибы 10. При этом полка 4 повторяет траекторию движения захватов 7, вначале устанавливаясь катками 17 на ограничители 18, катится по ним и затем опускается на направляющие 3 в точке перегиба 10. В этот л омент захваты 7, обходя нижнюю часть направляющих звездочек 11 на перегибе 10, ьыходят из гнезд 15 и продолжают двигаться по горизонтали, минуя гнезда 15 нижнего ряда полок 4. В процессе перемещения полки 4 по ограничителям 1Й происходит ее контакт с нижним рядом полок 4-и перемещение его до ограничителя 18 на другом конце направляющих 3 за счет освободившегося пространства от поднятой ввер( полки 4.
Аналогичным образом, одновременно с установкой полок 4 на нижние направляющие 3, происходит подъем и установка полки 4 на верхние направляющие 2 с противоположной стороны стеллажа.
После установки полок 4 на нижние и направляющие 2 и 3 и смещения
нижний М Bppxtw.x рядов, крайние полки ciraпонятся BMOEib подготоапенными д.чя захва-: та и перемещения их по вертикали. Захват. (рпдготовлениых крайних полсж 4 производится также в процессе обхода захватами 7 перегибов ГО и направляющих звездочек II (фиг. 2)..
Вначале захваты 7,чобходя с нижней стороны направляющие звездочки II на перегибах 10, входят в гнезда 15, приподнимают полку 4, далее катят ее по ограничителям 18 и затем перемещают вертикально, обходя крайние направляюплие звездочки II.
На этом цикл перемещения полок заканчивается. Перемещение полок может производиться непрерывно с неограниченным повторением циклов. Возможно также реверсивное движение полок с изменением наГ1равления движения на любом этапе цикла. Остановка полок 4 и загрузочнора-эгрузочного окна 25 производится на уровне любого из ограничителей 18.
Применение предлагаемого механизированного стеллажа на машиностроительных предприятиях, а также в других отраслях народного хозяйства позво.11ит механизировать и значительно повысить производительность труда на транспортно-складских работах, а также позволяет исключить дополнительные цепные контуры и дополнительные передаточные механизмы, что упрощает конструкцию и повьилает Е1адежность и удобство эксплуатации. L.- 16 8 / /
иг.1 17 /
Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизированный многоярусный стеллаж | 1977 |
|
SU701872A1 |
| Механизированный стеллаж | 1977 |
|
SU727523A1 |
| Механизированный стеллаж | 1975 |
|
SU683957A1 |
| Механизированный многоярусный стеллаж | 1982 |
|
SU1024392A1 |
| Механизированный стеллаж для хранения штучных грузов | 1984 |
|
SU1266799A1 |
| Элеваторный стеллаж | 1986 |
|
SU1379188A1 |
| Устройство для загрузки и разгрузки стеллажей | 1983 |
|
SU1134484A1 |
| Механизированный стеллаж | 1982 |
|
SU1022875A1 |
| Склад для хранения крупногабаритных грузов | 1981 |
|
SU1018884A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 2003 |
|
RU2247815C1 |

МЕХАНИЗИРОВАННЫЙ СТЕЛ ЛАЖ, содержащий корпус, размещенные fl Корпусе горизонтальные направляющие для грузонесущих полок и механизм для передачи полок с одного яруса на другой, включающий в себя отклоняющие звездочки, огибающие их цепные контуры с образованием горизонтальных и вертикальных участков и прикрепленные к цепям контуров и взаимодействующие с торцовыми сторонами полок захваты, отличающийся тем, что. с целью упрощения конструкции, повышения надежности и удобства эксплуатации, цепиые контуры с каждой торцовой стороны полки образованы единой замкнутой цепью и имеют горизонтальные участки на всю длину направляющих, а одни из отклоняющих звездочек попарно установлены с каждой боковой стороны направляющих в зоне расположения крайних полок и охвачены цепью с возможностью смещения центральной части каждого горизонтального участка контура относительно его концов.
5
.//
-23 24
/5 22
2/
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ | 0 |
|
SU364511A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 3692195,214-164 1972 (прототип) | |||
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
