1
Изобретение относится к обпасти измерения момента нагрузки прсАлышпенньпс механизмов, в частности, к устройствам измерения момента резания при обработке матеркапов врошакипимся инструментом, и может быть использовано & адаптивных схемах управления метаплоре жушими стшками.
i ecTHO устройство измерения мскиента на валу р очего органа, содержащее упругий элемент, датчик и бцок регист рации l.
OtoHJaKO и естное устройство не обеспечивает требуемой точности измерения.
Наиболее близким к предлагаемому по технической су1щности является устройство для измерения статического момента . на валу, содержащее датчик электромагнитного момента, который через первое инерционное звено соединен с прямым входом перюого сумматора, инверсный вход которого через первый блок дифференцирования соединен
с датчиком частоты вращения вала электродвигателя 2 .
К недостаткам известного устройства относится низкая точность измерения статического момента.j.v
Uenb изобретения - по гшение точности измерения.
Указанная цель достигается тем, что в него введены второе и третье инерционные звeflья, сумматоры и блоки дифференцирования, причем выход первого сумматора через второй блок ди|)фер8н- цирсвания соединен с прямым входом второго сумматора, инверсный вход которого через второе инерционное звено соединен с датчике частоты вращения вала, а выход второго сумматора через третий блок дифференцирования соединен с инверсным входом третьего сумматора, прямой вход которого через третье инерционное эвено соединен с выходом первого сумматора, причем постоянные времени перивого, второго, третьего инерционных звеньев, постоянные времени первого
и третьего блоке дифференцирования равны между собой.
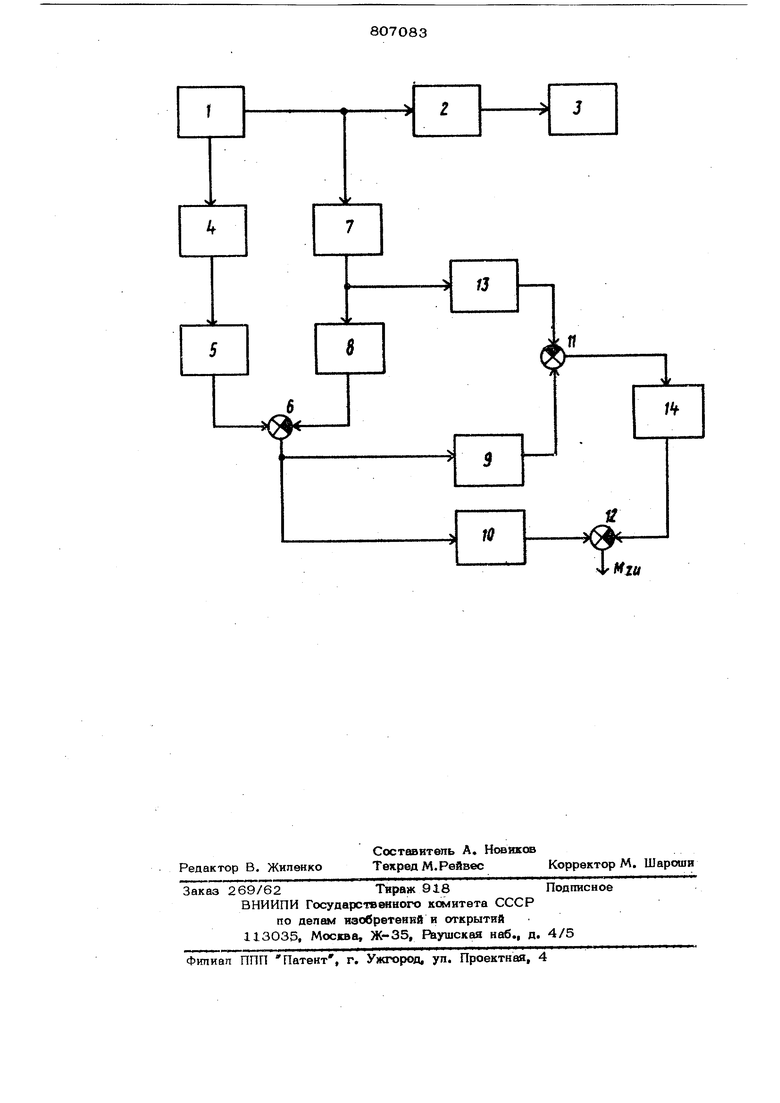
На чертеже представпано предлагаемо устройство дпя измерения стапгческого момента ншрузки на вапу.
Эпектродаигатепь I соединен через упругое кинематическое звено 2 с рабочим органом 3. Датчик 4 эпектромагнитного мсмента соединен через первое икерционкое звено 5 с прямым входом первого сумматора 6. Датчик 7 частоты
вращения вапа через первый дифференцирующий блсж 8 соединен с инверсным входом первого сумматора 6, выход которого второй дифференцирующий бпок 9 и третье инерционное авено 1О соединен соответственно с прямыми вхои лк второго 11 и третьего 12 сумматора. Выходдатчика 7 частоты вращения вапа черва второе инерционное звено 13 соединен с инверсным входом второго сумматора 11, выход которого через третий Д1фференцируюаий бпок 14 соединен с инверсным входом третьего сумматора 12.
Устройство работает следующим образом.
Сигиад с датчика эпектромагнитного
момента 4 поступает на вход пержого сумматора 6, на инверсный вход которого поступает сигнап, пропорциональный динш ичес8С 4у моменту электродвигателя с выхода нервого дифференцирующего бло ка 8. Сетэда пропорциональный угловой частоте врашения эпектродвигателя, через второе инерционное звено поступает на тшверсный вход второго сумматора, на прямой вход которого через второй дифференцирующий блок 9 поступает сигнап с выхода первого сумматора. Выходной сигнап с выкода второго сумматора 11 через третий дифференцирующий бпок 14 поступает на инверсный вход третьего сумматора, на прямой вход которого поступает сигнап с выхода сумматора 6 через третье инерционное звене. Выход сумматора 12 является выходом системы.
Формула изобретения Устройство для измерения статического момента нагрузки на валу, содержащее датчик электромагнитного момента, который через первое инерционное звено соединен с прямым входом первого сумматора, инверсный вход которого через первый блок Д1«{)ференцирс ания соединен с датчиком частоты вращения вапа эпе тродвигателя, отличающееся тем, что, с целью повышения точности измерения, в него введены второе и третье инерционные звенья, сумматоры и блоки дифференцирования, причем выход первого сумматора через второй блок дифференцирования соединен с прямым входом второго сумматора, инверсный вход которого через второе инерционное звено соединен с датчиком частоты вращения вапа, а выход второго сумматора через третий бпок
дифферениирсжания соединен с инверсным входом третьего сумматора, прямой вход которого через третье инерционное звено соединен с выходом первого сумматора, причем постоянные времени первого, второго, третьего инерционных звеньев, постоянные времени первого и третьего блоков дифференцирования равны между собой.
35
Источники информации, принятые во внимание при экспертизе: 1. Бронштейн Т.П. и др. Адаптивное управление металлорежущими станками. М., Машиностроение, 1973, с 96-НО.
40 12. Научные и прикладные дроблемы энергетики. Минск, Высшая школа , 1977, вып. 4, с. 13О-133 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭКСПЛУАТАЦИИ СКВАЖИНЫ С ПОГРУЖНЫМ ЦЕНТРОБЕЖНЫМ НАСОСОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2165037C2 |
| Устройство для централизованного контроля | 1974 |
|
SU652570A2 |
| Регулятор | 1980 |
|
SU907511A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 2012 |
|
RU2499351C1 |
| Пьезокварцевый гигрометр точки росы | 1982 |
|
SU1140022A1 |
| Устройство для измерения скорости вращения вала электродвигателя | 1977 |
|
SU684445A1 |
| Устройство для управления приводом робота | 1987 |
|
SU1579770A1 |
| Самонастраивающаяся следящая система с бесконтактным двигателем постоянного тока | 1984 |
|
SU1259212A1 |
| Электропривод | 1986 |
|
SU1385217A1 |
| Устройство для измерения статического момента нагрузки электродвигателя | 1975 |
|
SU543094A1 |