1
Изобретение относится к электрическим машинам, а именно к устройствам для измерения статического момента нагрузки электродвигателя, и может быть использовано, например, в автоматизированно1 1 регулируемом электроприводе.
Известны устройства для измерения статического момента нагрузки электродвигателя, выполненные в виде тензодатчиков, размещенных на валу, и измерительного прибора 1. Однако в динамических режимах такие устройства недостаточно точны.
Известны также устройства для измерения статического момента нагрузки электродвигателя, сопряженного при помощи вала с рабочим механизмом, содержащие последовательно соединенные датчик электромагнитного момента и усилитель, подключенный к инверсному входу сумматора 2. Измерение статического момента нагрузки производится путем вычитания из электромагнитного момента двигателя динамического, который получают как произведение момента инерции привода на угловое ускорение. Для получения величины углового ускорения используется дифференцирующее устройство, производящее дифференцирование напряжения тахогенератора, который является датчиком угловой скорости электродвигателя. Недостатком этих
устройств является большая погрещность измерения статического момента в динамических режимах из-за погрещностей при дифференци ровании напряжения тахогенератора.
Для повышения точности измерения в динамических режимах предлагаемое устройство сиабл ено датчиком, измеряющим момент на валу, и вторым усилителем, которые соединены последовательно и подключены к прямому входу сумматора, причем коэффициенты усиления первого и второго усилителей выбраны равными
/С, К, 1+К„
где /1 и /2 - моменты инерции вращающихся частей электродвигателя и рабочего механизма, соответственно.
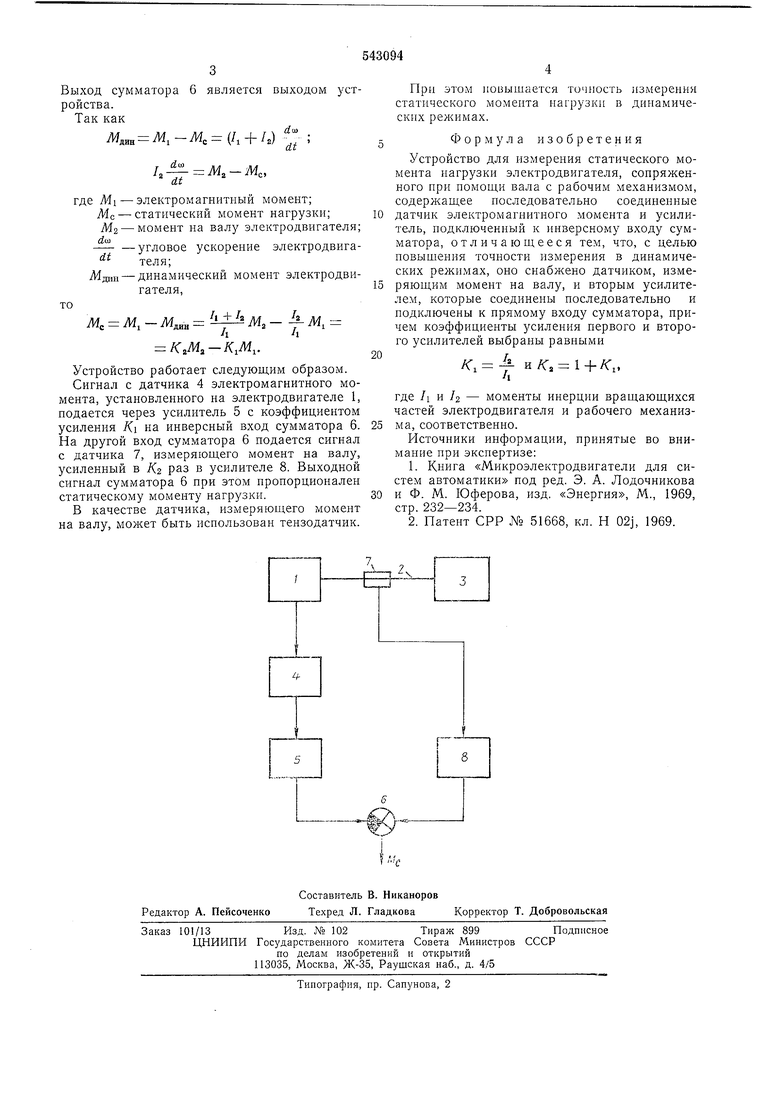
На чертеже дана блок-схема описываемого устройства.
Электродвигатель 1 сопрялсен при помощи вала 2 с рабочим механизмом 3. Датчик 4 электромагнитного момента соединен последовательно с усилителем 5, выход которого подключен к инверсно.му входу сумматора 6. Датчик 7, измеряющий момент на валу, соединен последовательно с усилителем 8, выход которого связан с прямым входом сумматора 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Электропривод | 2019 |
|
RU2713185C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ С ФРИКЦИОННОЙ НАГРУЗКОЙ | 1992 |
|
RU2079961C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2175120C2 |
| Ротационный вискозиметр | 1976 |
|
SU651233A1 |
| Самонастраивающаяся система управления | 1987 |
|
SU1462242A1 |
| Электропривод с оптимальным управлением | 1985 |
|
SU1339854A1 |
| Моментный электродвигатель постоянного тока с ограниченным углом поворота | 1990 |
|
SU1757038A1 |
| Устройство для управления приводом робота | 1980 |
|
SU928298A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
