(54) РЕГУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор | 1980 |
|
SU903802A1 |
| Регулятор | 1981 |
|
SU945849A1 |
| Адаптивная система управления агломерационной установкой | 1981 |
|
SU1125604A1 |
| Система регулирования | 1985 |
|
SU1298711A1 |
| Регулирующее устройство | 1981 |
|
SU980069A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| Адаптивный прогнозирующий регулятор | 1982 |
|
SU1123020A1 |
| Адаптивная двухцелевая система управления | 1982 |
|
SU1100608A1 |
| Устройство для согласования производительности технологических участков | 1982 |
|
SU1100607A1 |
I
Изобретение относится к области автоматического управпения и регулирования и может быть использовано для построения систем управпения, содержащих значительные запаздывания и поавержен-ных влиянию контролируемых и неконтролируемых возмущений, характеристики которых изменяются на интервале времени запаздывания.
Предполагается, что динамика объекта достаточно хорошо аппроксимируется оператором
Р) -|К р)
коэффициент усиления К и время запаз- . дыванияС которого незначитепьно изменяются в течение длительности переходного процесса, где U(p) и IW(p - регу пирующие воздействия и контролируемые возмущения..
Примером такого рода объектов CTiyжат различного рода проточные аппараты (емкости) с притоком материалов, расход
которых изменяется с запаздыванием и стоком материалов из этих емкостей.
Целью управления является обеспечение инвариантности регулируемой координаты от контроптруемых и неконтролируемых внешних воздействий.
Известны регуляторы с косвенным измерением возмущений, включакяцие обратные модели объектов регулирования, блоки задержки, экстраполяторы и блоки
10 сравнения .
Такие регуляторы не обеспечивают вь сокой точности регулирования из-за того, что в них не учитываются в STBHOM виде контролируемые возмущения и необходи15мость фиксирования начальных условий при обращении оператора интегрирования.
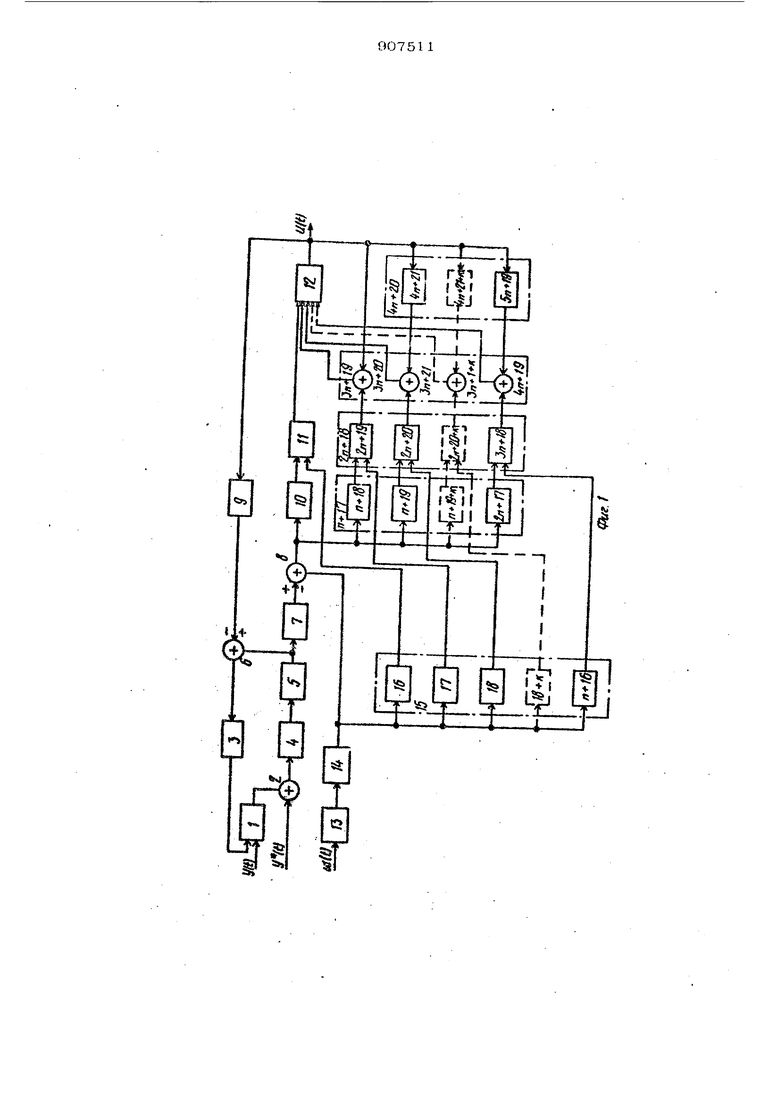
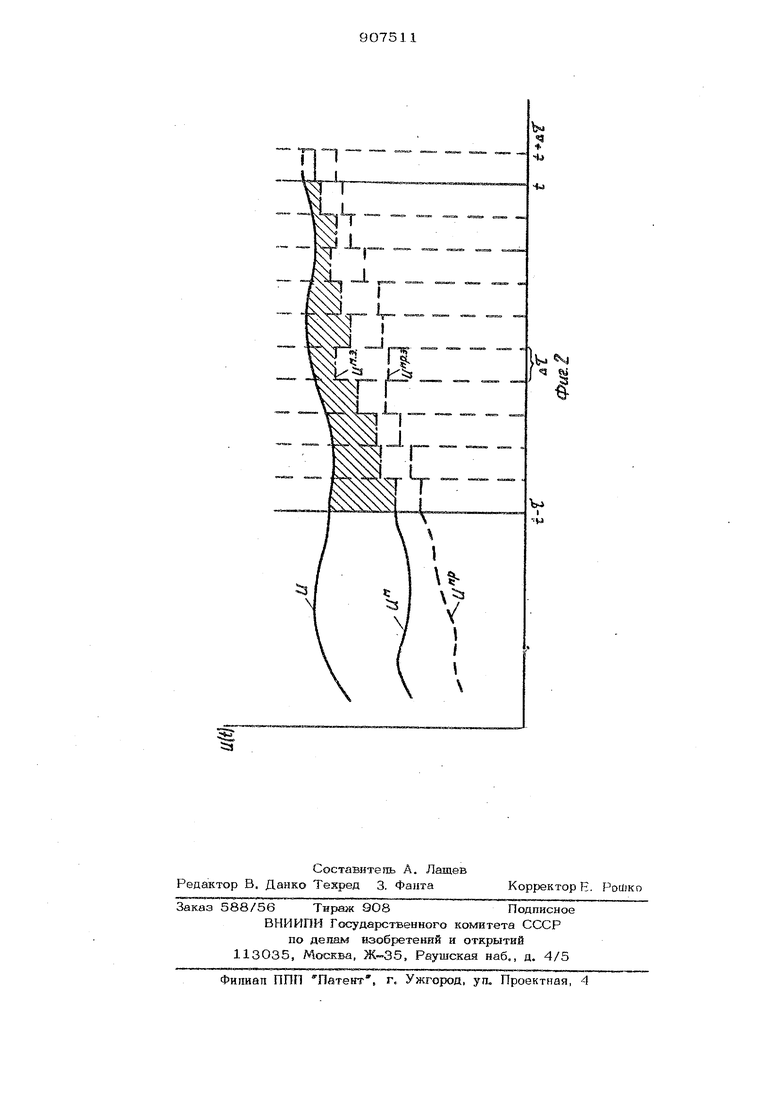
Наиболее близким к предлагаемому является регулятор, содержащий поспедоватепьно соединенные первый блок сравне30ния, первый фипьтр низкой частоты, пропорционально-интегральный блок, второй блок сравнения, модель объекта регупирования и первый сумматор, выход которого 390 соединен с входом первого блока сравне- ния, nepiiiifl экстрапогштор н первый бпок задержки, выходом Подключенный к друго му входу второго блока сравнения 2j. Недостаток этого регупятора эакпюча ется в невысокой точности регупирования что обусповпено спедуюшиг Н факторами: в явном виде не учитываются контро пируемые возмущения; не учитывается разносаь между про гнозируемыми модельными н фактическими реадазованными управлениями на ни- тервапе времени запаздывания, что для объектов, содержащих интегрирующие звенья, приводит к понижению точности ре гупирования. . Цепь изобретения - повышение точноо ти регупирования. Поставпенная цепь достигается тем, ЧТО в регугштор, содержащий поспедоватепьно соединенные первый бпок сравнения, первый фильтр низкой частоты, гзро порционапьно-интеграпьный бпок, второй бпок сравнения, модель объекта регушзрования и первый сумматор, выход которого соединен с входом первого бпока срав нения, первый экстраполятор п первый блок задержки, выходом подключенный к другому входу второго блока сравнения, введены последовательно соединенные вто рой фипьтр низкой частоты, Масштабируюший блок и третий блок сравнения, третий фильтр низкой частоты, второй сумматор, третий Сумматор, второй и третий экстраполяторы, четвертый сумматор, чет вертый блок сравнения и второй бпок задержки, причем выход масштабирующего бпока подключен к входакз третьего зкстраполятора, первый выход которого соединен с первым входом второго сум матора, а остальные - с соответствующи ми первыми входами четвертого суммато ра, выходы которого соединены с соответствующими первыми входами четверто го блока сравнения, выходами подключен- кого к соответствующим входам третьего сумматора, к последнему входу которого подсоединен выход второго сумматора, соединенного вторым входом с выходом первого экстраполятора, вход которого соединен с выходом третьего бпока сравнения, выход которого через второй экс- траполятор подключен к втора 1м входам четвертого сумматора, выход пропорииоиапьно-интегрального бпока подключен к вхойу третьего фильтра низкой частоты, выход которого соединен с однам из вхо дов третьего блока сравнения, выход тре тьего сумматора соединен с входом первого бпока задержки и со вторым входом четвертого бпока сравнения, а через второй бпок задержки - с соответствующими третьими входами четвертого бпока срав нейия. На фиг, 1 приведена блок-схема предлагаемого регулятора; на фиг. 2 - peajfeзация его управляющих воздействий. Обозначения; (-t) - измеряемый выходной сигнан объекта управления (регу- шаруемая координата) в момент време ни Ь ) заданный сигнал (задание на ре17пируемую координату); (u(-tj - измеряемый сигнап о внешнем возмущении; О (У - управляющий сигнал; U(-t} - фактй чески реализованное управление; U (-Умодельное управление; )-приведенное модельное спрогнозированное управление; (J Ш- приведенное модельное экстрапо гшрованное управление; t текущее время. Регулятор содержит первый сумматор 1, первый блок 2 сравнения, модель 3 объекта регулирования, первый фильтр 4 низкой частоты, пропорционально-«нтег ральный блок 5, второй блок 6 сравнения, третий фильтр 7 низкой частоты, бпок 8 срав} ения, первый блок 9 задержки, первый экстраполятор 1О, второй сумматор 11, третий сумматор 12, второй фильтр 13 низкой частоты, масщтабирующий блок 14, третий экстраполятор 15 в количестве П 1 (У1 10-2О) с 16 по 16, второй экстраполятор 17 в количестйе с И + 18 по 2И+17, четвертый сумматор 2 У)+18 в количестве с 2И +19 по 3 И-1-18, четвертый блок 3 19 сравнения в количестве с ЗУ + +20 по , второй блок .4И+20 задержки в количестве с 4И + 21 по5У)+19, Регулятор работает следующим образом. В сумматоре 1 выходной сигнап объекта управления суммируется с выходным сигналом модели 3.объекта регулирования по каналуU-v без запаздывания (в рассматриваемом случае интегратором) в результате чего получается выходной сигнал (i) модельного контура регулирования. Сигнал V (4:) поступает на первый блок сравнения, где из него вычитается заданный сигнап vCt/-Подученный сигнал поступает на первый фильтр 4 низкой частоты, в котором подавляется высокочастотная составпяющгш сигнала, что повышает точность его дальнейшего преобразования. С выхода фильтра 4 сигнал по59ступает на прюпорционапьно-интеграпь ный бпок 5 (ПИ регупятор), на выходе которого получается управпяющий сигнап ) () моиепъного контура регупирова, НИН. Сигнап U(i,-C) в третьем фипьтре 7 низкой частоты, усредняется на интервале времениДТ - и идет на один из входов.третьего бпока 8 сравнения. Измеряемые сигнапы о внешнем возмущении Ш Gfc учитываются следующим образом. Сигнап о внешнем возмущении СУ tt) поступает на второй фильтр 13 низкой частоты, где усредняется на интервале времени АТ7, и идет на масштабирующий бпок 14, в котором умножается на постоянный коэффициент пересчета возмущающих воздействий и управления. В третьем блоке 8 сравнения выходной сигнал масштабирующего блока 14 вычитается из выходного сигнала третьего фипьтра 7 низкой частоты, в результате чего получается сигнал о приведенном управлении ), характеризующий эффекты контролируемых возмущений, который экстра полируется с помощью экстрапопятора 10 например в виде реального форсирующего звена, на интервал времени U + AT. С выхода масштабирующего блока 14 сигнал поступает на третий экстраполятор 15, где он экстраполируется на интервалы времени: С+Д.Г в экстраполяторе 16, 1Г в экстрапопяторе 17,Т- ДТ в экстра лоляторе 18,C-vKATB экстраполяторе 18+ +К и ДТ в экстрапопяторе И+16. Во Втором сумматоре 11 сигнап о экстраполированном модельном управлении ( суммируется с сигналом, поступающим с экстраполятора 16. Тем самым экстрапо- -лированное приведенное модельное управпение пересчитывается на условия экстраполированных на тот же интервал времени контролируемых возмущений, и получается управление U (t-( ЛТ Далее учитывается разность между спрогнозированными модельными фактически реализованными управлениями (на фиг. 2 заштрихованная область).Для этого сигнал о j (i,) поступает с выхо да третьего блока 8 сравнения на второй экстраполятор 10+17 и экстраполируется на интервалы времени .U в экстрапо- пяторе , С-ЛТв экстраполяторе М+19,С-1 йТГв экстраполяторе h+19+К и ЛТ в экстраполяторе 2И + 17. К полученным таким образом сигналам U |усуммируются в четвертых сумматорах 2У1+18 сигналы с выходов соответствующих третьих экстраполяторов 15, что в результа- 116 те дает модепьное спрогнозированное управлении (-t)H интервале времени fc-C-t. Сигнал о фактических управляющих воздействиях l}(i,) с выхода третьего сумматора 12 поступает на входы второго бпока 4П+20 задержки, где задерживается на время в блоке 4ц+21 задержки, на время Кл.1Гв блоке (4И+21+К) и на время Т в блоке 5vo + 19. Таким образом, запоминается траектория фактических управлений на интервале времени Ь-Т-ЧВ четвертом блоке Зу)+19 сравнения из сигналов о фактических управлениях и (4;); поступающих с выходов второго экс- траполятора 2И+18, вычитаются сигнапы . о модельных спрогнозированных управлениях О Щпоступающих с выходов бпока 4И+20 задержки и выхода третьего сумматора 12. В блоке Зй +20 сравнения из сигнала ) вычитается сигнал U(-fe) , в блоке 3h+21 сравнения из сигнала (-t-AT)сигна/1 UCt- ScA в блоке Зи+21+К из сигнала (j Ci-KuT)-сигнал и()и в блоке из сигнала U(i-C+ic)- сигнал 0(i -C+f C)- В третьем сумматоре 12 суммируются сигналы о попучо пгых разностях, поступающие с вызоода четвертого блока Зи+19 сравнения, а также сигнал (-Ь+дс с выхода второго сумматора 11. На выходе третьего сумматора 12 получается сигнал об управлениях 0(t)i который через первый, блок 9 задержки на время 1 подается на вход второго блока 6 сравнения, где вычитается из сигнала у (-t-Tj, поступающего с-выхода пропорционально-интегрального блока 5. Использование предлагаемого регулятора позволяет повысить точность воспроизведения задания за счет того, что в явном виде учитываются контролируемые возмущения и разность между прогнозируемыми модельными и фактическими управлениями на интервале времени запаздывания. Формула изобретения Регулятор, содержащий последовательно соединенные первый блок сравнения, первый фильтр низкой частоты, пропорционально-интегральный блок, второй блок сравнения, модель объекта регулирования и первый сумматор, выход которого соединен с входом первого блока сравнения, первый экстраполятор и первый блок задержки, выходом подключенный к другоу входу вторюго блока сравнения, от-.
пичаюшнйся тем, что, с цепью повышения точности регулятора, он соаер« жит последоватетшно соедввенные второй фильтр внзкой частоты, масштабир тюший блок и третий бпок сравнения, третий фильтр низкой частоты, второй сумматор, третий сумматор, второй н третий экстраполяторы, четвертый сумматор, четвертый блок сравнения и второй блок задержки, причем выход масштабирующего блока подключен к входам третьего экстршполятора, первый выход которого соединен с первым входом второго сумматора, а остальные выходы - с соответствующими первыми входами четвертого сумматора, выходы которого соединены с соответствующими первыми входами четвертого блока сравнения, выходами подключенного к соответствующим входам третьего сумматора, к последнему входу которого подсоединен выхбд второго сумматора, соединенного вторым входом с выходом первого экстраполятора, вход которого соединен с выходом третьего блока сравнения, выход которого через второй экстраполятор подключен к вторым входам четвертого сумматора, выход пропорционально-интегрального блока подключен к входу третьего фнпьтра низкой частоты, выход которого соединен с одним из входов третьего блока сравнения, выход третьего сумматора соединен с входом первого блока задержки и со вторым входом четвертого блока сравнения, а через второй блок задер 1ки - с соответствующими третьими входами четвертого блока сравнения.
Источники информации, принятые во внимание при экспертизе
кп. G 05 В 13/О2, 1980 (прототип).
ЬгФ
s )э
