и потому вызыванхцего дополнительную погрешность.
Цель изобретения - повышение точности.
Указанная цель достигается тем, что известное устройство снабжено блоком деления и последовательно включенными блоком интегрирования и пропорционально-интегрирующим динамическим блоком, охваченным обратной связью;; выход блока измерения магнитного потока подсоединен к блоку умножения, выход которого соединен с входом блока интегрирования, к входам блока деления подключены выходы датчика ЭДС и блока измерения магнитного потока, а его выход включен на вход пропорционально-интегрирующего блока. Датчик ЭДС снабжен переменным резистором со скользящим контактом с двумя крайними и одним промежуточным выводами, решающим усилителем и тремя конденсаторами, два из которых включены параллельно резисторам тахометрического моста, а третий - между скользящим контактом и промежуточным выводом переменного резистора, крайние выводы которого соединены соответственно с выходом тахометрического моста и с выходом ре-щающего усилителя,; а промежуточный вывод переменного резистора подключен ко входу решакяцего усилителя, выход которого соединен со входом блока деления.. На чертеже приведена функциональная электрическая схема предлагаемого устройства.
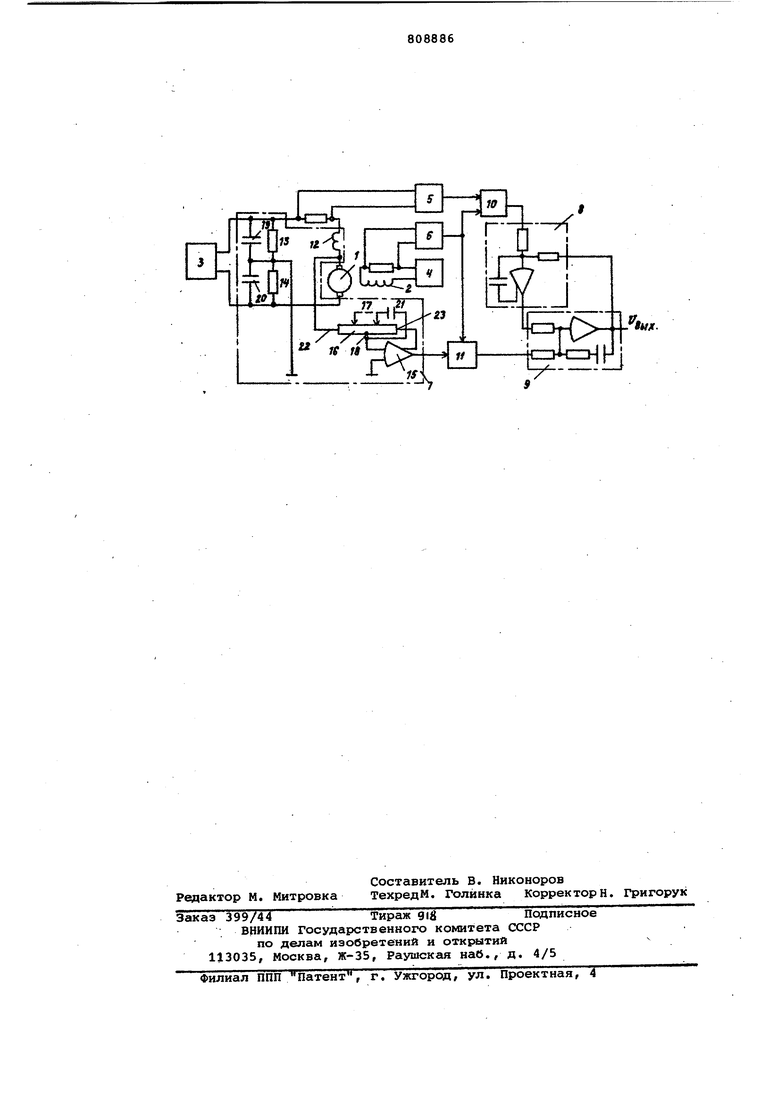
Электропривод содержит двигатель с обмотками якоря 1 и независимого возбуждения 2, якорная 1 обмотка и обмотка 2 возбуждения подключены к источникам 3 и 4 управляемых напряжений соответственно.
Устройство для определения момента нагрузки содержит датчик 5 тока, датчик 6 магнитного потока и датчик
7ЭДС двигателя электропривода, блок
8интегрирования, пропорциональнринтегрирукиций блок 9, блоки 10 умножения и деления 11. Выходы датчиков
5тока и магнитного потока 6 подключены к двум входам блока 10 умножения, выходы которого соединены со входом блока 8 интегрирования. Выход последнего подключен ко входу установленного на выходе устройства пропорционально-интегрирующего блока 9, выход которого соединен со входом блока 8 интегрирования. Выход датчика 7 ЭДС двигателя соединен со входом блока 11 деления, вход делителя которого соединен с выходом датчика
6магнитного потока, а выход блока
11 деления подключен ко входу пропорционально-интегрируняцего блока 9.
Датчик 7 ЭДС двигателя электропривода выполнен в виде тахометрического моста, в плечи которого включены обмотки якоря 1 и дополнительных полюсов 12 двигателя и-два резистора 13 и 14. Датчик 7 содержит также решающий усилитель 15, дополнительный резистор 16 со скользящим контактом 17 и промежуточным выводом 18 к три конденсатора 19 -21, причем первый 19 и второй 20 конденсаторы подключены параллельно первому 13 и второму 14 резисторам тахометрического моста, а третий
конденсатор 21 включен между скользящим контактом 17 и промежуточным выводом 18 дополнительного резистора 16. крайние выводы 22 и 23 которого соединены соответственно с выходом та-: хометрического моста и с выходом
решающего усилителя 15, а промежуточный вывод 18 дополнительного резистора 16 соединен со входом решающего усилителя 15.
Напряжение на выходе устройства
равно:
lJfeMX - HMn +ptnu P Turr,u
где KH масштабный коэффи циент, связывающий выходное напряжение устройства с моментом нагрузки Мц в
установившемся режимеTo,Tnu постоянная времени
блока 8 интегрирования и пропорционально-интегрирующегоблока 9;
п(1 - время изодрома блока 9 f
KV Кер- масштабные коэффициенты датчиков то.ка 5 и магнитного потока G i Kf, - передаточный коэффи циент блока 10 умножения .
Для реализации уравнения (1) посоянная времени блока 8 интегрироваия выбирается из условия
Кф Ktj.Kn Э
12)
I и в - - ----- ) КЕКдСЕСн
де D
-приведенный момент и.нерции двигателя;
-масштабный коэффициент датК, чика 7 ЭДС;
К д - передаточный коэффициент
блока 11 деления; Cgt См- конструктивные постоянные
двигателя.
Как следует из уравнения (1) , стройство для определения- момента агрузки электропривода представляет обой динамическое звено второго по-, ядка. Введя обозначения Л . , /Ctiu
(с rUTho ifivi где ta)c.H - собственная частота н демпфированных колебаний и относите ный коэффициент демпфирования. Изменение выходного напряжения устройства ,ix° Функции момента на рузки электропривода Ми существенно зависит от величин и взаимного расположения нуля: Гн -4 2& и двух поЯюсов передаточной функции устройства, которые при (1 являются комплексными сопряженными: 1-,(-e. ,), где J Y-1, а при 1 полюсы вещес венны и определяются зависимостями: ri-(Jt(-C,); .-7сЛм ) Относительное расстояние первым полюсом и нулем характеризуется зависимостью: Переходный процесс при условии ,1 практически монотонный и определяется только, вторым (дальним о МНИМОЙ оси) вещественным полюсом, а время tfi переходного процесса (пр пятипроцентной точности) определяет зависимостью: . t.. что соответствует значениям l/u) 0,302/и)спри изменении s в пределах (или изменении Д в пределах 0, 0,01). Задаваясь требуемым значением времени процесса t,,, можно определить требуемые значения , или А из выражений:tn-K е;) а также непосредственно требуемое вре мя изодрома
ге.
« п
ии
Ос
что позволяет обеспечить соответствие качества переходного процесса предъявляемым к нему требованиям. При этом устройство обеспечивает нулевую установившуюся ошибку определения момента нагрузки как при ступенВведение решающего усилителя 15, дополнительного резистора 16 со скользящим контактом 17 и промежуточным выводом 18 и третьего конденсатора 21 (Cj) обеспечивает безинерционность датчика 7 ЭДС двигателя электропривода;
Ппри скользящий контакт 17 устанавл1Й1ается справа от промежучатом изменении этого момента, так и при линейном его изменении. Установившаяся ошибка по ускорению соответствующая параболическому характеру изменения момента нагрузки при ускорении изменения момента, имеет при этом конечное значение, определяемое выражением: ... q - . Выбором величины ЭДС эта ошибка мо- . жет быть сведена к допустимому уровню. Обеспечению высокой точности способствует также выполнение датчика 7 ЭДС двигателя электропривода. Статическое равновесие тахометрического моста обеспечивается выбором активных резисторов его плеч: . где R, Rj -сопротивления, первого 13 и второго 14 резисторов тахометрического моста} Rq, Кд -сопротивления обмоток якоря 1 и дополнительных полюсов 12 двигателя электропривода} -« -А индуктивности обмоток 1 и 12. Как известно, даже при выполнении условия статического равновесия тахометрического моста вследствие нёшичия индуктивностей в цепи якоря и . те1хометрический мост не является безинерционным звеном, а при отсутствии конденсаторов 19 и 20 неизбежно влияние изменения напряжения U и источника 3 на Bbtxcgi Hoe напряжение тахометрического моста, следствием чего является появление динамической ошибки определения ЭДС двигателя и момента нагрузки электропривода. Введе(ние конденсаторов 19 и 20 позволяет исключить влияние напряжения иу источника 3 управляемого напряжения на выходное напряжение тахометрического моста при выборе вели- чин этих конденсаторов в соответствии с зависимостями: с,- -точного вывода 18 с коэффициентом деления бС правой части резистора 16 (меядупромежуточным выводом 18 и выхсэдом решающего усилителя 15). При этом выходное напряжение решаихцего усилителя is характеризуется зави,симостью: U(;°Rf.
При выборе параметров С j , Of , R,. , R i/i в соответствии с зависимостями: od -А . где Ry, сопротивления левой (мемщу выходом тахометрического моста и промежуточным выводом 18) и правой (между промежуточным выводом 18 и выходом решающего усилителя 15) частей д полнительного резистора 16, обеспечивается безинерционная связь меязду ЭДС двигателя и выходом датчика этой ЭДС через масштабный коэффициент Kg, благодаря чему исключается дополнительная ошибка определения ЭДС и момента нагрузки электропривода в динамических режимах. Аналогично при kP скользящий контакт 17 уста1| вливается слева от промежуточного вывода 18 с коэффи циентом деления fb левой части дополнительного резистора 16 (межцу выходом тахометрического моста и промежуточным выводсчи 18) . Таким образом, предлагаемое устройство при указанном выборе его пар метров позволяет повысить точность о ределения момента нагрузки электропривода в статическом и динамическом режимах, обеспечивая нулевые статическую и скоростную ошибки и возможность уменьшения сяиибки по ускорению изменения момента до величины, меньшей допустимой, а также возможность минимизации времени переходного процесса при практически монотонном его характере. Кроме того, учет величин магнитного потока двигателя элект ропривода позволяет исключить влияни изменения этого потока на точность оп ределения момента нагрузки. Предлагаемое выполнение входящего в устройство датчика ЭДС также обеспечивает повышение точности за счет исклю чения влияния напряжения источника питания якорной цепи двигателя на выходное напряжение датчика ЭДС и за счет обеспечения безинерционности этого датчика. При этом существенно уменьшается влияние изменения сопротивления якорной цепи двигателя на точность, поскольку ,в отличие от извест-. ного устройства параметры предлагаемого устройства (в датчике ЭДС)выбираются пропорциональными не абсолютным значениям параметра этой цепи, а разностн и отношению параметров обмоток якоря и дополнительных полюсов, изменение которых меньше их абсолютных изменений вследствие близости температурных режимов этих обмоток. Формула изобретения 1.. Устройство для измерения момента нагрузки электродвигателя постоянного тока с независимой обмоткой возбуждения, содержащее датчики тока, ЭДС и блок измерения магнитного потока электродвигателя, блоки умножения и суммирования, выход датчика тока включен на вход блока умножения, датчик ЭДС выполнен в виде тахометрического моста, в плечи которого включены обмотки якоря и дополнительных полюсов двигателя, и два резистора, отличающееся тем, что, с целью повышения точности, устройство снабжено блоком деления и последовательно включенными блоком интегрирования и пропорционально-интегрирующим динамическим блоком, охваченным обратной связью, выход блока измерения магнитного потока подсоединен к блоку умножения, выход которого соединен с входом блока интегрирования, к входам блока деления подключены выходы датчика ЭДС и блока измерения магнитного потока, а его выход включен на вход пропорционально-интегрирующего блока.. 2. Устройство по П.1, отличающееся тем, что датчик ЭДС снабжен переменным резистором со скользящим контактом с двумя крайними и одним промежуточным выводами, решающим усилителем и тремя конденсат чэ ми, два из которых включены лельно резисторам тахометрического моста, а третий - между скользящим контактом и промежуточным выводом переменного резистора, крайние выводы которого соединены соответственно с выходом тахометрического моста и с выходом решакйцего усилителя, а промежуточный вывод ггеременного резистора подключен ко входу решающего усилителя, выход которого соединен со входом блока деления. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР по заявке 2394586, кл. Q 01 L 3/22, 1976. 1.. 2.Авторское свидетельство СССР 420893, кл. q 01 L.3/22, 1972.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводом постоянного тока и устройство для его осуществления | 1977 |
|
SU705632A1 |
| Способ защиты обмотки якоря электродвигателя от перегрева и устройство для его осуществления | 1984 |
|
SU1279010A1 |
| Электропривод постоянного тока | 1977 |
|
SU692044A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ОБРАТНОЙ СВЯЗЬЮ ПО ЭДС | 2001 |
|
RU2211526C2 |
| Электропривод постоянного тока | 1978 |
|
SU817953A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1997 |
|
RU2123230C1 |
| Устройство для измерения момента и мощности на валу электрической машины постоянного тока с обмоткой дополнительных полюсов | 1978 |
|
SU781179A1 |
| Устройство для изменения частоты вращения электродвигателя постоянного тока | 1985 |
|
SU1310982A1 |
| Следящий электропривод | 1983 |
|
SU1131009A2 |
| Вентильный электропривод | 1990 |
|
SU1791953A1 |