1
Изобретение относится к автоматике и вычислительной технике, в частности к числовому программному управлению и может быть использовано при построении систем числового программного управления станками.
Известны измерительные преобразователи для программного управления, содержащее датчик положения, подключенный к приводу, задатчик положения, соединенный с фазовым дискриминатором, нелинейные формирователи и релейные элементы 1.
Однако такие устройства отличаются большой сложностью, а также имеют значительные статические и динамические погрешности преобразования исполнительного механизма.
Наиболее близким к предлагаемому является импульсно-фазовое устройство для программного управления. Это устройство содержит блок суммирования и последовательно соединенные генератор импульсов, делитель частоты, датчик перемещения, первый фильтр нижних частот и последовательно соединенные усилитель мощности, двига тель и привод подач механизмов станка, причем вал двигателя механически связан со вторым входом датчика перемещения 2.,.
Недостатком известного устройства является .низкая точность и сложность конструкции.
Цель изобретения - упрощение конструкции механизма привода подач и устройства программного управления, а также повышение точности устройства.
Поставленная цель достигается тем, что устройство для управления приводом содерu жит первый операционный усилитель, второй операционный усилитель, последовательно соединенные первый реверсивный счетчик и блок кодирования, последовательно соединенные второй фильтр нижних частот, первый цифроаналоговый преобразователь, 5 третий операционный усилитель и второй цифроаналоговый преобразователь, последовательно соединенные третий цифроаналоговый преобразователь, четвертый операционный усилитель и четвертый цифроаналоговый преобразователь, последовательно соединенные блок вычитания, нуль-орган, инвертор и первый элемент И, последовательно соединенные второй элемент И и коммутатор, последовательно соединенные второй
реверсивный счетчик и пятый цифроаналоговый преобразователь, вход второго фильтра нижних частот соединен со вторым выходом датчика перемещения, первый выход второго цифроаналогового преобразователя соединен со вторым входом третьего операционного усилителя, первый вход третьего цифроаналогового преобразователя соединен с выходом первого фильтра нижних частот, первый выход четвертого цифроаналогового преобразователя соединен со вторым входом четвертого операционного усилителя, входы блока вычитания соединены с выходами третьего и четвертого операционных усилителей, первый вход второго элемента И соединен с выходом нуль-органа, выходы коммутатора соединены со входами блока суммирования и со входами первого реверсивного счетчика, выходы блока суммирования связаны со входами второго реверсивного счетчика, выход пятого цифроаналогового преобразователя соединен со входом усилителя мощности, первый, второй, третий и четвертый выходы блока кодирования соединены со вторыми входами соответственно первого, второго, третьего и четвертого цифроаналоговых преобразователей, второй выход первого цифроаналогового преобразователя соединен с первым входом первого операционного усилителя, второй вход которого соединен со вторым выходом второго цифроаналогового преобразователя, а выход - с третьим входом третьего операционного ус 1лителя, второй выход третьего цифроаналогового преобразователя соединен с первым входом второго операционного усилителя, второй вход которого соединен со вторым выходом четвертого цифроаналогового преобразователя, а выход - с третьим входом четвертого операционного усилителя, выход генератора импульсов соединен со вторыми входами первого и второго элементов И, выход первого элемента И соединен со вторым входом коммутатора, третий вход которого соединен со вторым выходом делителя частоты.
Статор и ротор датчика перемещения содержат плоские многополюсные обмотки, выполне1 ные на алюминиевых подложках с диэлектрическим слоем окиси алюминия, с числом пар полюсов кратным щагу ходового винта привода.
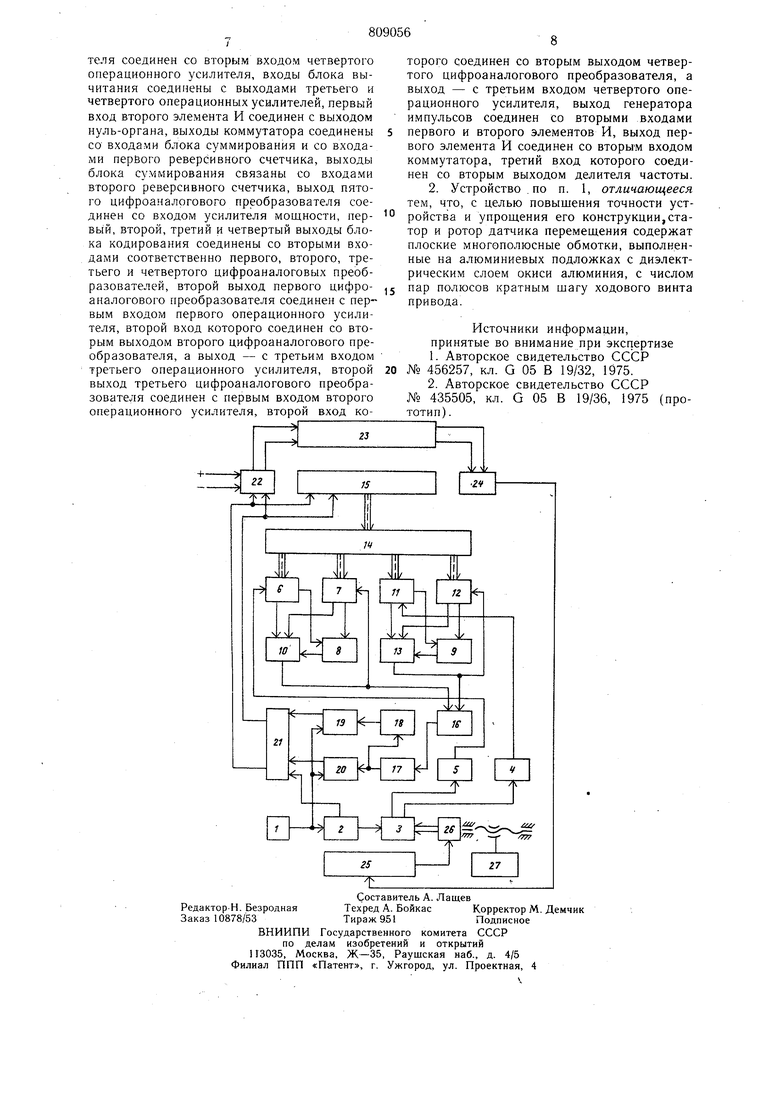
На чертеже приведена блок-схема предлагаемого устройства управления приводом.
Устройство содержит генератор импульсов 1, делитель частоты 2, датчик перемещения 3, первый и второй фильтры низкой частоты 4 и 5, первый и второй цифроаналоговые преобразователи 6 и 7, первый, второй и третий операционные усилители 8-10, третий и четвертый цифроаналоговые преобразователи 11 и 12, четвертый операционный усилитель 13, блок кодирования 14, первый реверсивный счетчик 15,
блок вычитания 16, нуль-орган 17, инвертор 18, первый и второй элементы И 19 и 20, коммутатор 21, блок суммирования 22, второй реверсивный счетчик 23, пятый цифроаналогоБый преобразователь 24, усилитель мощности 25, двигатель 26, привод 27 подач механизмов станка.
Устройство работает следующим образом.
Импульсы тактовой частоты от генератора импульсов 1 поступают на вход делителя частоты 2, сигнала с выхода которого поступает на роторную обмотку датчика перемещения 3. Модулированные по амплитуде сигналы с выходов первой и второй статорных обмоток датчика перемещения 3 поступают на одинаковые фильтры низкой частоты 4 и 5. На выходе первого фильтра низкой частоты 4 формируется сигнал
y, cc«f/V-S(n(.«)t
0 где U, -сигнал на выходе фильтра низкой
частоты 4; р угол поворота вала датчика пере. мещения 3;
/ число пар полюсов роторной обмотки датчика 3;
5CJ-частота сигнала на первом выхо. де делителя частоты 2; -время.
На выходе второго фильтра низкой частоты формируется сигнал 0ц rsm fA/-5(/JtDt
где Uf-сигнал на выходе фильтра низкой
частоты 5.
Сигнал с выхода второго фильтра низкой частоты 5 поступает на вход первого
5 нелинейного множительного устройства, состоящего из первого и второго цифроаналоговых преобразователей 6 и 7 и первого и третьего операционных усилителей 8 и 10. Сигнал с выхода первого фильтра низкой частоты поступает на вход второго нелинейного множительного устройства, состоящего из третьего и четвертого цифроаналоговых преобразователей 11 и 12 и второго и четвертого операционных усилителей 9 и 13.
На первом и третьем выходах блока кодирования 14 формируются квадратурные симметричные треугольные функции содержимого первого реверсивного счетчика 15, поступающие соответственно на вторые входы первого и третьего цифроаналогового преобразователей 6 и ff На втором и четвертом выходах блока кодирования 14 формируются коды, пропорциональные модулям указанных квадратурных функций и поступающие соответственно на вторые входы второго и четвертого цифроаналогового преобразователя 7 и 12.
При этом на выходе блока вычитания 16, входы которого связаны с выходами oneрационных усилителей 10 и 13, формируется сигнал рассогласования (i)t %rcx)-ft3 f i «WЯШ 1где пи-сигнал рассогласования на выходе блока вычитания 16; Q j 9-квадратурные симметричные функции;X -содержимое первого реверсивного счетчика 15; . J где п - число разрядов первого реверсивного счетчика 15. Этот сигнал рассогласования поступает на вход нуль-органа 17, с выхода которого через инвертор 18 - на первый вход первого элемента И 19. На первый вход второго элемента И 20 указанный сигнал рассогласования поступает непосредственно. На вторые входы элементов И 19 и 20 поступают высокочастотные тактовые импульсы от генератора импульсов 1. Выходы элементов И 19 и 20 через коммутатор 21 поступают на суммирующий и вычитающий входы первого реверсивного счетчика 15. На управляющий вход коммутатора 21 поступает прямоугольный сигнал со второго выхода делителя 2, который в зависимости от знака рассогласования синфазен или противофазен с напряжением U |«, формируемым на выходе блока вычитания 16. Коммутация импульсов, формируемых на выходах элементов И 19 и 20, осуществляется с помощью коммутатора 21 таким образом, что при положительном знаке рассогласования импульсы с первого выхода коммутатора 21 поступают на вычитающий вход первого реверсивного счетчика 15, а при отрицательном знаке рассогласования импульсы со второго выхода коммутатора 21 - на суммирующий вход первого реверсивного счетчика 15. Благодаря этому содержимое первого реверсивного счетчика 15, связанного через блок кодирования 14 с цифроаналоговыми преобразователями 6 и 7, 11 и 12, изменяется таким образом, что сигнал рассогласования на выходе блока вычитания 16 обращается в нуль. Поэтому содержимое первого реверсивного счетчика 15 оказывается пропорциональным углу поворота входного вала датчика перемещения 3. Одновременно импульсы с первого или второго выходов коммутатора 21 поступают на входы блока суммирования 22, на другие входы которого поступают импульсы задания от внещнего интерполятора. Импульсы из блока суммирования 22 поступают на суммирующий и вычитающий входы второго реверсивного счетчика 23, содержимое которого пропорционально разности между заданием и отработкой. Содержимое второго реверсивного счетчика 23 поступает на вход пятого цифроаналогового преобразователя 24, управляющего усилителем мощности 25 двигателя 26, вал которого непосредственНО связан с роторо.м датчика перемещения 3 и с ходовым винтом привода подач механизмов станка 27. Использование нового элемента, связанного с валом двигателя многополюсного датчика перемещения, который имеет плоские статорные и роторные обмотки, выполненные на алюминиевых подложках, покрытых вакуумплотным слоем окиси алюминия, с числом пар полюсов, кратным щагу ходового винта привода, а также нелинейных множительных устройств, выполненных на стандартных интегральных схемах, выгодно отличает предлагаемое устройство управления приводом от указанного прототипа, так как в предлагаемом устройстве существенно упрощается и удвщевляется конструкция механизма привода подач за счет исключения прецизионного мультипликатора с большим передаточным отнощением и дорогостоящего резольвера, повыщается точность измерения перемещения за счет использования многополюсного датчика перемещения и повыщается надежность устройства за счет использования стандартных интегральных схем. Формула изобретения 4, Устройство для управления приводом, содержащее блок суммирования и последовательно соединенные генератор импульсов, делитель частоты, датчик перемещения, первый фильтр нижних частот и последовательно соединенные усилитель мощности, двигатель и привод подач механизмов станка, причем вал двигателя механически связан со вторым входом датчика перемещения, отличающееся тем, что, с целью повыщения точности устройства, оно содержит первый операционный усилитель, второй операционный улитель, последовательно соединенные первый реверсивный счетчик и блок кодирования, последовательно соединенные второй фильтр нижних частот, первый цифроаналоговый преобразователь, третий операционный усилитель и второй цифроаналоговый преобразователь, последовательно соединенные третий цифроаналоговый преобразователь, четвертый операционный усилитель и четвертый цифроаналоговый преобразователь, последовательно соединенные блок вычитания, нуль-орган, инвертор и первый элемент И, последовательно соединенные второй элемент И и коммутатор, последовательно соединенные второй реверсивный счетчик и пятый цифроаналоговый преобразова тель, вход второго фильтра нижних частот соединен со вторым выходом датчика перемещения, первый выход второго цифроаналогового преобразователя соединен со вторым входом третьего операционного усилителя, первый вход третьего цифроаналогового преобразователя соединен с выходом лервого фильтра нижних частот, первый выход четвертого цифроаналогового преобразователя соединен со вторым входом четвертого операционного усилителя, входы блока вычитания соединены с выходами третьего и четвертого операционных усилителей, первый вход второго элемента И соединен с выходом нуль-органа, выходы коммутатора соединены со входами блока суммирования и со входами первого реверсивного счетчика, выходы блока суммирования связаны со входами второго реверсивного счетчика, выход пятого цифроаналргового преобразователя соединен со входом усилителя мощности, первь1Й, второй, третий и четвертый выходы блока кодирования соединены со вторыми входами соответственно первого, второго, третьего и четвертого цифроаналоговых преобразователей, второй выход первого цифроаналогового преобразователя соединен с первым входом первого операционного усилителя, второй вход которого соединен со вторым выходом второго цифроаналогового преобразователя, а выход - с третьим входом третьего операционного усилителя, второй выход третьего цифроаналогового преобразователя соединен с первым входом второго операционного усилителя, второй вход которого соединен со вторым выходом четвертого цифроаналогового преобразователя, а выход - с третьим входом четвертого операционного усилителя, выход генератора импульсов соединен со вторыми входами первого и второго элементов И, выход первого элемента И соединен со вторым входом коммутатора, третий вход которого соединен со вторым выходом делителя частоты. 2. Устройство . по п. 1, отличающееся тем, что, с целью повышения точности устройства и упрощения его конструкции,статор и ротор датчика перемещения содержат плоские многополюсные обмотки, выполненные на алюминиевых подложках с диэлектрическим слоем окиси алюминия, с числом пар полюсов кратным шагу ходового винта привода.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 456257, кл. G 05 В 19/32, 1975.
2.Авторское свидетельство СССР
№ 435505, кл. G 05 В 19/36, 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Число-импульсный следящий электропривод | 1983 |
|
SU1233099A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Цифровой следящий привод | 1978 |
|
SU734607A1 |
| Широтно-импульсное устройство для программного управления приводом | 1981 |
|
SU1020799A1 |
| Устройство приема телеметрической информации | 1989 |
|
SU1735883A1 |
| Устройство для управления шаговым приводом | 1985 |
|
SU1315941A1 |
| Нулевой радиометр | 1986 |
|
SU1330588A1 |
| Следящий преобразователь угла поворота вала в код | 1983 |
|
SU1116446A1 |
| Устройство для преобразования перемещения в код | 1981 |
|
SU978174A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1991 |
|
RU2007027C1 |
