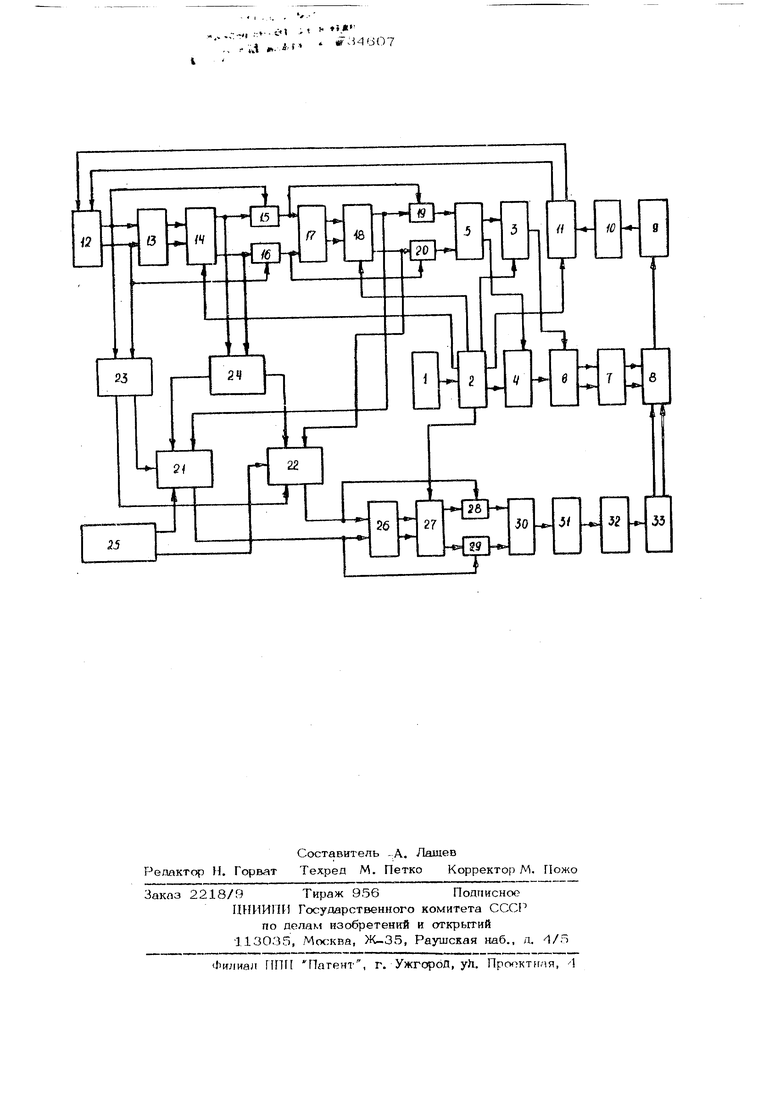
Изобретение относится к технике автоматического регулирования и может быть использовано, например, в устройст вах числового программного управления металлорежущими станками. Известный цифровой следяпяий привод имеет высокую стабильность характеристик регулирования l . Недостаток этого привода - неудовлетворительные динамические характерис тики. Наиболее близким техническим решением является устройство преобразования перемещение-код-фаза, содержащее пос ледовательно соединенные первый реверсивный счетчик и первый сумматср, последовательно соединенные генератср импульсов, первый делитель частоты, второй сумматор, логический блок, блок клю чей, датчик перемещения, усилитель, вто рой выход первого делителя частоты соединен со, втсрым входом первого сумматора, второй выход первого реверсивного счетчика соединен со вторым входом второго сумматора, выход первого сумматора соединен со вторым входом логического блока 2 . Недостатком известного устройства преобразования перемещение-код-фаза является аналоговый характер сигналов, соответствующих скорости и ускорению измеряемого перемещения, что затрудняет его применение в цифровом приводе. Цель изобретения - повышение точности цифрового следящего электропривода. Поставленная цель достигается тем, что цифровой педяжий привод содержит , интерполятор, третий и четвертый сумматсры, выходы которых соединены со входами первого реверсивного счетчика, второй и третий делители частоты, пятый, шестой и седьмой сумматоры и послеловательно соединенные преобразователь напряжение-частота, вход которого соединен с выходом усилителя, кс ммутатор, второй реверсивный счетчик, третий реверсивный счетчик, первый счетчик с ггпременным коэффициентом деления, BOQIJ37мой сумматор, четвертый реверсивный счетчик, BTOfJoft счетчик с переменным коэффициентом деления, девятой сумматор, пятый реверсивный гчетчик, третий счетчик с переменным коэффшднентом де- лекия, десятый cyMMaTqs, шестой реверсивный счетчик, преобразователь код-фаза, блок управления и двигатель, выход которого связан со входом датчика nepesмещения, другие выходы первого делителя частоты соединены со счетными входами первого, второго и третьего счетчиков с переменным коэффициентом деления и с управляющим входом коммутатора, первый вход пятого сумматора соединен со вторым выходом первого счетчика с перемен ным коэффициентом Деления и с первым входом третьего делителя частоты, а выход пятого сумматора соединен со вторы входом четвертого реверсивного счетчика и с первым входом четвертого сумматора, первый выход третьего Делителя частоты связан с первым входом шестого сумматора, второй вькод третьего делителя частоты связан со вторым входом девятого сумматора, а второй вход треть его делителя частоты связан с первым выходом первого счетчика с переменным коэффшдиеитом деления, первый выход вто рого счетчика с переменным коэффициентом деления связан с первым входом третьего сумматора, второй вход которого связан с выходом восьмого султматора, второй выход второго счетчика с переменным коэффициентом деления связан со вторым входом четвертого сумматора и со входом шестого сумнштора, третий вход которого связан с первым выходом интерполятора, а четвертый вхо с первым высходом второго делителя частоты, выход шестого сумматора связан со вторым входом пятого реверсивного счетчика и со вторым входом дес5ггого сумматора, первый выход второго реверсив ного счетчика связан со вторым входом восьмого сумматора и с первым входом второго делителя частоты, )ой вход которого связан со вторым выходом второго реверсивного счетчика и со вторым входом пятого сумматора, а второй выхо второго делителя частоты связан с треть им входом девятого сумматора, чет;верть вход которого связан со вторым выходом интерполятора, первый вход седьмого сумматора связан со вторым выходом третьего счетчика с переменным коэ44 циентом деления, второй вход с выходом девятого сумматсч кэ, а выход - со 7 входом шестого реверсивного счетчика, С пцность изобретения поясняется чертежом, где приведена блок-схема гц)едла- гаемо1о цифрового следшдего привода. )овой следящий электроп17ивод содержит генератор) 1 импульсов, первый делитель 2 частоты, первый и второй сумматоры 3 и 4, первый, реверсирзный счетчик 5, логический блок 6, блок 7 ключей, датчик 8 перемещения, усилитель 9, преобразователь 1О напряжениечастота, коммутатор 11, второй реверсивный счетчик 12, третий реверсивный счетчик 13, первый счетчик 14 с переменным коэффициентом деления, восьмой сумматор 15, пятый сумматор 16, четвертый реверсивный счетчик 17, вгфой счетчик 18 с переменным коэффициентом деления, третий сумматор 19, чет- вертьп сумматс 20, девятый сумматор 21, шестой сумматор 22, и третий делители 23 и 24 частоты, интерполятор 25, пятый реверсивный счетчик 26, третий счетчик с переменным коэффициентом деления 27, десятый сумматор 28, седьмой сумматор 29, шестой реверсивный счетчик 30, преобразователь код-фаза 31, блок 32 управления, двигатель 33. Устройство работает следующим образом. Импульсы тактовой частоты от генератора 1 импульсов поступают на вход первого делителя 2 частоты. С-одержимое первого делителя 2 частоты в прямом коде поступает на входы первого и второго сумматоров 3 и 4. На друг;{е входы сумматоров 3 и 4 поступает содержимое первого реверсивного счетчика 5 соответственно в прямом к обратном коде. Выходы старших разрядов суммато{зов 3 и 4 поступают на логический блок б. на выходе которого формируются две последовательности и иротно-модулированных импульсов, скважность которых определяется содержимым первого реверсивного счетчика 5. Эти широтно-модулнрованные импульсы через блок 7 ключей поступают на вхо1Шые обмотки датчика 8 перемещения. Выходной сигнал датчика 8 поступает на полосовой усилитель 9, на выходе которого форм фуется синусоидальное напряжение, частота которого равна частоте сигнала, ф : мируек ого нл выхоле старшего разряда первого делителя 2 частоты, а амплитуда гфо0орцио)ал,нл гкличине рассогласования между мгновенными значениями измеряемого угла поворота вала татчнка перемещения 8 и измеренного значения угла ci , пропорционального содержимому первого реверсив- ного счетчика 5. В зависимости от знака рассогласования этот синусоидальный сигнал сиихфазен или противофазен прямоЗТолЕзНому сигналу, формируемому на выходе CTapuicro разряда первого делителя частоты 2. Преобразователь напряжение-частота 10 вьфабатывает серию импульсов с мгновенной частотой -ЛоСики где { - мгновенная частота на вьLxoдe преобразователя напряжениечастота 10; fj-, - опорная частота; и - напряжение рассогласования на вьЕСоде полосового усилителя У; К - глубина модуляции. Эти импульсы через управляемый стар шим разрядом первого делителя 2 частот коммутатор 11 поступают на суммируто- щий вход второго реверсивного счетчика 12 в течени- положительного полупериода прямоугольного утфавляюшего сигна;1а и на вычитающий вход этого реверсивног счетчика - в течение отрицательного по- лупериола этого сигнала. Реверсивный счетчик 12 вьтолняет роль цифрового фильтра, так как при положительном знаке рассогласования на выходе прямого переноса реверсивного счетчика 12 формируется серия импульсов частоты, пропорциональной величине рассогласования. При отрицательном знаке рассогласования серия импульсов частоты, пропорциональной величине рассогласования, ф : мирует ся на выходе обратного переноса реверси ного счетчика 12. Эти импульсы поступа ют соответственно на суммирующий и вычитающий входы третьего реверсивного счетчика 13, который управляет первым счетчиком с переменным коэффициентом деления 14. Счетчик 14 осуществляет деление частоты, поступающей с промежуточного выхода первого делителя частоты 2, причем в зависимости от знака кола, содержащегося в третьем реверсивном счетчике 13, импульсы частоты, пропорциональной абсолютной величине этого кода, формируются на одном из двух выходов первого счетчика с переменным коэффициентом деления 14. Импульсы, 4ормируемые на выходах (:чг тчика 14 поступают на вхогш восьMoio и пятого сумматоров 15 и 16. I На др)тке входы этих сумматоров посту-, пают сигналы с выходов второго реверсивного счетчика 12. Блоки 13-16, соединенньге указашгым образом, выполняют роль циф)ового интегратора частоты, охваченного цепями фо{зсировки. HN пульсы с выходов восьмого и пятого сумматоров 13 и 16 поступают на входы аналогично oпиcaннo fy вьгле ци4рового интегратора частоты, oxFia4eHHoro цепя ми форскровки и вьшолненного на четвертом реверсивном счетчике 17, втором счетчике с переь еннь м коэффициентом деления 18, третьем и 4eTBeproNi сумматорах 10, 20. Импульсы с выходов сумматоров 19 и 2О поступают соответственно на суммирующий и вычитающий входы первого реверсивного счетчика 5. В описанной цифровой следящей измерительной системе с астатизмом второго порядка содержимое первого реверсивного счетчика 5 соответствует изморя- OMONty углу поворота ci , содержимое четвертого реверсивного счетчика 17 угловой скорости fS , а солержи тое третьего реверсивного счетчика 13 - угловому ускорению Г вала датчика перемещения 8. Игипульсы с выходов второго реверсивного счетчика 12 и первого счетчика с неременным коэ.фф щиенток{ деления 14 поступают соответственно на девятого и щестого сумматоров 21, 22 через второй и третий делители частоты 23 и 24. На другие входы сумматоров 21 к 22 поступают импульсы с БЫКОДОВ второго счетчика с переменным коэффициентом деления 18 и с вьькодов интерполятора 25. Импульсы с выходов сумматоров 21 и 22 поступают соответ ственяо на суммирующий и вьР1итающга1 входы пятого реверсивного счетчика 20.Содержимое пятого реверс 1ГОНОГО счетчтса 2в описывается следующей зависимостью М --с1- К,, где N - содержимое пятого реверсивного счетчика 26; ip - задание от интерполятора 25; k Кл - постоянные коэффициенты, задаваемые соответственно третьим и BTOpbtM делителями частоты 24 и 23. Пятый реверсивный счотчик 26 управляет третьим счетчиком с переменным ксеффициентом деления 27. Третий счетчик с переменным ко;эффицие1гтом деления 27 осуществляет деление частоты, поступающей с промежуточного вьЕХОда первого делителя частоты 2. Выходы третьего счетчика с переменным коэффициентом деления 27 соединены со вхолами десятого и седьмого сумматоров 28, 29, импульсы с выходов которых поступают на входы суммирования и вычитания шестого реверсивного счетчика 30 соответственно. На другие входы десятого и седьмого сумматоров 28, 29 поступают импульсы с выходов шесто го и девятого сумматоров 22 vi 21. соот ветственно. Содержимое шестого реверсивного счетчика 30 описывается выраже нием , где К коэффициент, огфеделяемый частотой импульсов, поступающих с промежуточного выхода первого делителя частоты 2 на счетный вход третьего счетчи ка с переменным коэффициентом деления 27; Nn- содержимое шестого реверсивно го счетчика ЗО. Код с выхода шестого реверсивного счетчика 30 поступает на синхронизированный от сети переменного тока преоб- разо эатель код,-фааа с арккосинусоидта/гь™ кой статической характернее якой 31, KOTopbrii- формирует управляющие импульс эажЕХания для тиристорного блока управления 32. Напряжение с выхода блока управления 32 поступает на лвигатель постоянного тока 33, вал которого меха чески связан с валом датчика г еремеЩ ния в. Для обеспечения устойчивости, а так вЬгсской динамической я статической точ ности в предложенном цис|ровом следшцо электроприводе использованы указанные обратные связи по ускорению, скорости я углу поворота вькодного вала дв 1гате :ля 33 и применен пропорционально-интег ральный закон регулирования, обратные связи «о ускореншо, скорости и углу по ворота вала двигателя значительно умен шают влияние нестабильностей в приводе а использование синхрсмизированного от сети переменного тока преобразовате ля код-фаза с арккосинусоидальной статической характеристикой позволяет ком пв1 сйроватьнелинейности, присущие дви гателю и тиристсрпоКСу блоку управления, что обеспечивает постоянство, динамических и статических характеристик этого цифрового привода при различных установившихся скорюстях вращения вала двигателя. Использование изобретения позволит обеспечитьвысокую точность, стабильность и надежность цифрового следящего привода. Особым достоинством этого привода является значительное по сравнению с существующими устройствами расширение диапазона регулирования, благодаря использованию в нем высокочастотной цифровой следящей -измерительной системы с астатизмом второго порядка, которая обеспечивает получение точной цифровой информации об измеряемых перемещении, скорости н ускорении вала датчика. Это позволяет отказаться от применения тахогенератора в электроприводе. Благодаря этому обеспечивается стабильная работа предложенного цифрового следящего привода даже при малых скоростях вращения вала двигателя. Использова.ние тахогенератора в этом режиме неэффективно вследствие низкого значения отнощения сигнал/щум на его выходе. Кроме того, достигается универсальность применения этого цифрового следящего электропривода, например, при использовании линейнььх электродвигателей и датчиков перемещения типа индуктосин, когда использование тахогенератора затруднительно. Настоящее изобретение обеспечивает также возможность быстрой перестройки параметров и структуры привода сравнительно простыми средствами. Формула изобретения Цифровой следящий привод, содержащий последовательно соединенные первый реверсивный счетчик и первый сумматор, последовательно соединенные генератор импульсов, первый делитель частоты, второй cjTviMaTop, логический блок, блок кллочей, датчик перемещения, усилитель, втфой выход первого делителя частоты со вторым входом первого cjMMaTopa, второй выход первого реверсивного счетчика соединен со вторым входом второго су лматора, вьсход первого сумматора соединен со вторым входом логического блока, отличающийся тем, что, с целью повьпиения точности привода, в него введены интерполятор, третий и четвертый сумматоры, выходы которых соединены со входами первого реверсивного счетчика, второй и третий делители частоты, пятый, шестой и седьмой сумматоры и 97 последовательно соединенные преобразователь напряжение-частота, вход которого соединен с выходом усилителя, ком мутатор, второй р -версивный счетчик, третий реверсивный счетчик, первый счет чик с переменным коэффициентом деления, восьмой сумматор, четвертый реверсивный счетчик, второй счетчик с пе- р.еменным коэффициентом деления, девяты сумматор, пятьш реверсивньсй счетчик, третий счетчик с переменным коэффициен том деления, десятый сумматор, игестой реверсивный счетчик, преобразоЕзатель код-фаза, блок управления к Двигатель, выход которого связан со входом датчик перемещения, другие выходы первого делителя частотьс соединены со счетными входами первого, BTOfJoro и третьего счетчиков с переменным коэффициентом деления и с управляющим входом коммутатора, первый вход пятого сумматора соединен со вторым выходом первся о счетчика с переменным коэффициентом деления и с первым входом третьего делителя частоты, а выход пятого сумма тора соединеч со вторым входом четвер того реверсивного счетчика и с первым входом четвертого сумматора, первый выход третьего делителя частоты связан с первым входом шестого сумматора, второй выход третьего делителя частоты связан со входом девятого сумматора, а второй вход третьего делителя частоты связан с первым выходом первого счетчика с переменным коэффициентом деления, первый выход второго счетчика с переменным коэффициентом деления связан с первым входом третьего сум- 7 матора, второй вход которого связан с выходом восьмого сумматора, второй выход второго счетчика с переменным коэффициентом деления связан со вто()ым входом четвертого сумматора и со вторым входом шестого сумматора, третий вход которого связан с первым выходом интерполятора, а четвертый вход - с первым входом второго делителя частоты, выход щестого сумматора связи со вторым входом пятого реверсивного счетчика и со вторым входом десятого сумматора, первьш выход второго реверсивного счетчика связан со вторым входом восьмого сумматора к с первым входом второго делителя частоты, второй вход которого связан со BTopbiNf выходом второго реверсивного счетчика и со вторым входом пятого сумматора, а второй выход второго делителя частоты связан с третьим входом девятого сумматора, четвертый вход которого связан со вторым выходом интерполятора, первый вход седьмого сумматора связан со вторым выходом третьего счетчика с nepesteHным коэффициентом деления, второй вход - с выходом девятого сумматора, а выход - со вторым входом шестого реверсивного счетчика. 1сточники информации, принятые во внимание при экспертизе 1.Патент США № 22-142О1, кл. G О5 В 19/18, ГЗ 23 С З/ОО, 1967. 2.Авторское свидетельство СССР по заявке № 2444424/18-24, кл. Q О8 С 9/00, 1977 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Асинхронный следящий привод | 1979 |
|
SU877469A1 |
| Интерполятор | 1978 |
|
SU813365A1 |
| Устройство для программного управления | 1986 |
|
SU1376065A1 |
| Фазоимпульсный преобразователь | 1983 |
|
SU1161977A1 |
| Устройство для программного управления | 1981 |
|
SU976428A1 |
| Преобразователь угловых перемещений в код | 1978 |
|
SU926703A1 |
| Устройство для цифрового позиционного управления | 1982 |
|
SU1084740A1 |
| Система для программного управления | 1986 |
|
SU1327063A1 |
| Цифровой интерполятор | 1986 |
|
SU1310778A1 |
| Устройство для программного управления | 1986 |
|
SU1317399A1 |